
Fターム[3D044AA11]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・目的 (680) | 定速走行制御の解除 (35)
Fターム[3D044AA11]に分類される特許
1 - 20 / 35
車両のクルーズコントロール装置
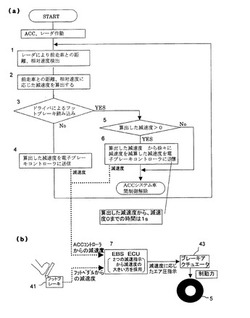
【課題】ドライバの操作に基づいてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】前走車との車間距離を維持するクルーズコントロールを行う車両のクルーズコントロール装置において、クルーズコントロール時に検出される前走車との車間距離に応じて制御減速度を算出する制御減速度算出手段(ステップ2)と、検出されるフットブレーキペダルの踏み込み量に応じて操作減速度を算出する操作減速度算出手段と、制御減速度と操作減速度のうち常に大きい減速度を選択して車両の制動を行う車両制動手段(ステップ7)と、フットブレーキ踏み込みを検出したら、所定の短時間、制御減速度をフットブレーキ踏み込みからの経過時間に応じて減少させてからクルーズコントロールを解除するクルーズコントロール解除手段(ステップ5、6)とを備えた。
(もっと読む)
車両のクルーズコントロール装置

【課題】先行車速度に応じてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】先行車との車間距離を検出する車間距離レーダを備え、検出される先行車との車間距離を維持するように自車速度を制御してクルーズコントロールを行う車速制御手段(ステップ6)と、検出される自車速度が所定の閾値以下に低下した場合にクルーズコントロールを解除するクルーズコントロール解除手段(ステップ3、8)と、算出される先行車速度が所定値より高い条件で前記閾値より低い閾値に切換える閾値切換手段(ステップ7、8)とを備え、例えば先行車が自車の前方に車線変更して来たような場合、減速制御により自車速度の一時的な落ち込みがあっても先行車に追従するクルーズコントロールを継続する構成とした。
(もっと読む)
車両の定速走行制御システム
【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
車両の走行制御装置
【課題】 車両が停止中にシフトレバーなどの操作をした場合でもドライバの意図することなく車両が走行することを防止することができる走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や車両の車速に基づいて、先行車両を追従する先行車両追従制御を行う。制御解除部22は、車両の走行中にシフトポジションがニュートラルレンジとされた場合に車間制御部21の制御を解除する。また、車両の停止中にシフトポジションがニュートラルレンジとされた場合に車間制御部21による車間制御の制御解除を中止する。
(もっと読む)
車両制御装置
【課題】自車両が車間距離制御中又は定速走行制御中の周辺車両交通の円滑さを向上させる車両制御装置を提供すること。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置が、車間距離制御中又は定速走行中に自車両後方から自車両を追い越そうとしている車両が検出されたとき、自車両の車速を抑制する。本車両制御装置は、自車両後方に検出された後続車両が自車両と同一の車線から隣接車線へ車線変更し、且つ、当該後続車両の車速が自車両の車速より大きく、且つ、自車両と当該後続車両との車間時間が所定値以下となったとき、当該後続車両を上記自車両を追い越そうとしている車両であると判断する。
(もっと読む)
鞍乗り型車両の定速走行制御装置
【課題】定速走行制御が解除されるとき、目標スロットル開度制御においてスロットル開度が運転者の予期しない値とならず、走行フィーリングを損ねることがないと共に、不要な機関出力を生じないようにした鞍乗り型車両の定速走行制御装置を提供する。
【解決手段】定速走行制御を実行する定速走行制御実行手段を少なくとも備えた鞍乗り型車両の定速走行制御装置において、実スロットル開度が指令スロットル開度APSなどから設定される目標スロットル開度となるようにアクチュエータを駆動するスロットル目標開度制御を実行するスロットル目標開度制御実行手段を備えると共に、指令スロットル開度APSと実スロットル開度TPSが所定の関係にあるか否か判定し(S60)、肯定されると共に、解除条件が成立すると判断される場合(S62からS66)、定速走行制御からスロットル目標開度制御に切り換える(S50)。
(もっと読む)
車両の走行制御装置
【課題】自車両を先行車両に追従走行させる追従走行制御中に、先行車両が頻繁に加減速を繰り返しても、それに追従して自車両が頻繁に加減速を繰り返すことを防止する。
【解決手段】追従走行制御(車間距離制御)中に、先行車両の所定時間当たりの加減速回数が判定値以上であるか否かで、先行車両が頻繁に加減速を繰り返しているか否かを判定し、先行車両が頻繁に加減速を繰り返していると判定された場合は、実車間距離が「目標車間距離−α」から「目標車間距離+β」までの範囲に設定された不感帯内であれば、定速追従制御に切り換えて車両の車速を一定車速に維持するように自車両を制御する。これにより、先行車両が頻繁に加減速を繰り返しても、それに追従して自車両が頻繁に加減速を繰り返すことを防止する。その後、実車間距離が不感帯から外れたときに、通常の車間距離制御に戻して実車間距離を目標車間距離に維持するように自車両を制御する。
(もっと読む)
運転装置の制御装置及び制御方法
【課題】安全性を確保することができる運転装置の制御装置及び制御方法を提供する。
【解決手段】車両の加速系の動作を指示するための操作レバー12を有する運転装置を制御するためのECU50において、前記操作レバー12を前記車両の加速系に一定の動作を指示するために所定の位置に固定している場合に、前記操作レバー12の固定を解除する。これにより、操作レバー12が固定されることにより車両に減速指示を出せない場合であっても、車両を減速させることができ、安全性を確保することができる。
(もっと読む)
吸気制御装置
【課題】機関本体に接続される吸気路形成体に吸気路を横切って車体フレームの左右方向に延びる弁軸が回動可能に支承され、スロットル弁が弁軸に固定される吸気制御装置において、吸気路形成体が車体フレームの左右方向中央部に配置されるにあたって、車体フレームの左右方向中央部から吸気制御装置の両端までの距離を略等しくする。
【解決手段】弁軸24を回動駆動する動力を発揮し得る電動モータ28を含むアクチュエータ26が弁軸24の一端部に連結され、車両運転者のスロットル操作量を検出するスロットル操作量センサ27が吸気路形成体18に支持されて弁軸24の他端に連結される。
(もっと読む)
鞍乗り型車両
【課題】スロットル弁が固着される弁軸が吸気路形成体に回動可能に支承され、スロットルグリップの回動操作に応じて作動する弁軸駆動用電動モータを有するアクチュエータが弁軸の一端に連結され、スロットルグリップに弁軸の回動作動がフィードバックされる鞍乗り型車両において、ケーブルの取りまわしを不要として、弁軸駆動用電動モータで回動駆動される弁軸の回動作動をスロットルグリップにフィードバック可能とする。
【解決手段】アクチュエータの作動に伴う弁軸の回動量に応じた作動量で作動するグリップ駆動用電動モータ37が、操向ハンドル35に配設されるとともにスロットルグリップ36に連動、連結される。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 車両に搭載された内燃機関の出力を駆動輪に伝達する手動変速手段と、その変速段を検出する変速段検出手段と、運転者によるクラッチペダル操作を検出するクラッチペダル操作検出手段と、内燃機関の回転数を検出する回転数検出手段と、車両の走行速度を検出する走行速度検出手段と、目標車速を設定する目標車速設定手段と、その出力に基づいて車両を加減速させる加減速手段とを備える。検出された変速段と走行速度に基づいて内燃機関の目標回転数を算出する目標回転数算出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には、内燃機関の回転数を目標回転数に基づいて制御を行う回転数制御手段とを備えた。
(もっと読む)
車両走行制御装置
【課題】 定速走行制御中において適切に変速を実行してドライバーの運転操作の煩雑化を防止する車両走行制御装置。
【解決手段】 定速走行制御時にエンジンブレーキが機能する状況になった場合、この時のエンジンブレーキ力が、調停部18が選択する定速走行制御側要求制駆動力Fctを満足できなければ、ドライバーは制動操作を行うことになる。AIシフト制御部20は、最大エンジンブレーキ力が選択制駆動力Fstのレベルに達していなければ、シフトダウンによりエンジンブレーキ力を強めて制駆動力を維持させることができる。このため目標車速Vctを維持してドライバーによるブレーキ操作等の煩雑化を防止することができる。又、カーブにおいて定速走行制御の目標車速を制限することによりドライバー操作の煩雑化と制御ハンチングを防止できる。
(もっと読む)
車両用走行制御装置
【課題】定速走行制御時に車線逸脱防止制御が作動して車両が減速した後に、再び車両が加速されるのを防ぐ。
【解決手段】定速走行制御が行われている時に、車線逸脱防止制御が作動した場合に、車線逸脱防止制御が作動した後の車速が設定速度より低い場合には、設定速度を、車線逸脱防止制御後の車速に変更する。これにより、車線逸脱防止制御が作動して、車速が低下した後に、車両が設定速度まで加速されるのを防ぐことができる。
(もっと読む)
先行車追従走行制御装置
【課題】 先行車追従走行制御における停止保持制御状態から制御解除状態への切り換え操作を改善する。
【解決手段】 車両の走行駆動源による駆動力と通常ブレーキ装置による制動力とを制御して、先行車との車間距離を保ちながら追従走行制御を行う追従走行制御装置において、追従走行制御中に停車状態が検出され、駐車ブレーキ装置を制御して作動させている状態(停止保持制御状態)において、追従走行制御を解除するための解除操作部材に対して追従走行制御を解除する操作と異なる所定の操作が行われた場合には、追従走行制御を解除して駐車ブレーキ装置を非作動とした状態(制御解除状態)へ切り換える。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
車両用速度制御装置
【課題】 車両の操作性を向上させること。
【解決手段】 車速を所定速度以下に制限する車速制限手段と、アクセル開度を検出するアクセル開度検出手段と、を備える車両用速度制御装置は、アクセル開度検出手段により検出されたアクセル開度の変化割合を算出する変化割合算出手段と、変化割合算出手段により算出された変化割合が所定割合以上であるか否かを判定する判定手段と、判定手段により変化割合が所定割合以上であると判定されたとき、車速制限手段による車速の制限を解除する制限解除手段と、を備えている。
(もっと読む)
駆動力制御装置
【課題】 駆動力ベースで調停を行う構成を採用しつつ、運転者の加減速意思に応じた適切な調停を可能とする駆動力制御装置の提供。
【解決手段】 本発明による駆動力制御装置は、運転者のアクセルペダルの操作量に基づいて第1目標駆動力F0を算出する第1目標駆動力算出手段と、車両が一定の車速を保つように、又は、車両周辺対象物に対して所定の相対距離又は相対速度関係を保つように、第2目標駆動力Fdを算出する第2目標駆動力算出手段と、運転者の加減速意思を判断する意思判断手段と、意思判断手段にて判断された運転者の加減速意思を考慮しつつ、第1目標駆動力F0と第2目標駆動力Fdを駆動力ベースで調停する調停手段と、前記調停手段にて調停した目標駆動力に基づいて駆動力発生装置を制御する駆動力制御手段と、を備える。
(もっと読む)
車両用走行支援装置
【課題】 隣接先行車の方向指示から隣接先行車の自車走行車線への車線変更を予測する車両用走行支援装置において、不必要な走行支援制御を防止することにより、運転者に不快感を与えないようにする。
【解決手段】走行支援制御ECUは、隣接先行車検出手段(ステップ102)が隣接先行車を検出し、車線変更予測手段(ステップ108)が隣接先行車の方向指示手段による方向指示から隣接先行車の自車走行車線への車線変更を予測し、影響度予測手段(ステップ116,118)が隣接先行車の自車走行車線への車線変更を予測したとき、隣接先行車の自車走行車線への車線変更による自車への影響を予測し、走行支援制御手段(ステップ122)が予測した自車への影響に応じて走行支援制御を行う。そして、走行支援制御ECUは、走行支援制御を開始した時点から所定時間KT経過しても隣接先行車が車線変更を開始しないときには、走行支援制御を中止する(ステップ124,126,130)。
(もっと読む)
走行制御装置
【課題】 追従制御を解除することなく先行車との車間距離を詰めて停車する。
【解決手段】 先行車までの車間距離が目標車間距離となるように先行車に追従走行を行う走行制御装置において、停車するまで先行車に追従走行する第1追従制御モードと、自車速が0より大きい所定車速に低下するまで先行車に追従走行する第2追従制御モードとを備える。
(もっと読む)
エンジン停止再始動制御装置、その方法及びそれを搭載した車両
【課題】 運転者がブレーキを踏み込むことなく車両が自動停車したときにもエンジンを自動停止させる。
【解決手段】 このアイドルストップ機能及び低車速追従走行機能を備えた自動車では、ステップS220で自動停車中フラグF2が値1であると判定されたときには、ステップS240で運転者によるブレーキの踏み込み以外のすべてのエンジン停止条件が成立したか否かを判定し、運転者によるブレーキの踏み込み以外のすべてのエンジン停止条件が成立したと判定されたときには、ステップS260でエンジンの各気筒への点火や燃料噴射を停止させてエンジンを自動停止させる。このように、車両が自動停車したときにはエンジン停止条件から運転者によるブレーキの踏み込みの条件が除かれるため、運転者がブレーキを踏み込むことなく車両が自動停車した場合であってもエンジンを自動停止させることができる。
(もっと読む)
1 - 20 / 35
[ Back to top ]