
Fターム[3D046BB19]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711) | 定速走行 (43)
Fターム[3D046BB19]に分類される特許
1 - 20 / 43
走行制御装置
【課題】定速走行制御と追従走行制御とを切り替える時に各制御による制御値を滑らかに推移させながらも制御性能を悪化させない走行制御装置を提供すること。
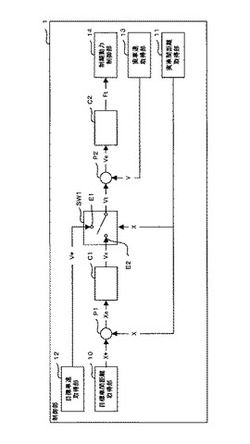
【解決手段】積分制御を含むフィードバック制御により車速Vを目標車速V*に制御する定速走行制御、及び、積分制御を含むフィードバック制御により車間距離Xを目標車間距離X*に制御する追従走行制御を有する走行制御装置100は、追従走行制御に関する制御値Vx及び定速走行制御に関する制御値V*の二つの対応する制御値を切り替えて何れか一方の制御値を出力させる制御切り替え手段SW1と、制御切り替え手段SW1が出力する制御値Vtに基づいて車輌における制駆動力を制御する制駆動力制御手段14と、制御切り替え手段SW1による切り替え時に二つの対応する制御値を等しくして走行制御を継続させる走行制御手段1と、を備える。
(もっと読む)
先行車追従走行制御装置

【課題】 減速制御時に最適なブレーキランプの点灯を行い、ブレーキランプ点灯用のリレーの耐久性に問題を生じさせることがない先行車追従走行制御装置を提供する。
【解決手段】先行車追従制御時に要求減速度(指示値)が第1の閾値よりも大きい場合には、ブレーキランプSW24によってブレーキランプ28を点灯させ、その際には、ブレーキランプリレー26を非駆動状態とする。
(もっと読む)
走行制御装置
【課題】車両を所定の走行状態とするように自動制御する走行制御装置において、ユーザがより適切に車両の走行状態の自動制御を利用できるようにすることを目的とする。
【解決手段】ACC・ECU2が、車両の走行状態(つまり、走行速度や先行車両との車間距離)の自動制御(いわゆる、ACC制御)が実行可能か否かを、複数種類の車両の周辺の状況、危険な運転操作の履歴、及び、自動制御開始後の走行距離等の判定項目と、各判定項目毎に予め設定された判定条件と、に基づいて判定する。そして、ACC制御が実行可能であると判定すると、その旨を示すメッセージを表示装置28に表示し、この表示に応じて運転者によりACCスイッチ10を介してACC制御の開始指令が入力されると、所定の走行状態とするように車両を制御する。
(もっと読む)
車両の走行制御装置
【課題】カーブ走行中において車速制御と旋回走行制御との協調を図る。
【解決手段】走行制御装置は、制駆動力制御により、目標車速に実車速を一致させる制御を行う車速制御と、カーブ内で車両を減速制御する旋回走行制御とを行っており、旋回走行制御の終了を検出した場合(ステップS41)、該旋回走行制御の終了時点の車速に基づいて、車速制御における目標車速を減少補正する(ステップS44、ステップS47)。
(もっと読む)
走行制御装置
【課題】トラクション制御終了後に走行制御を自動的に復帰可能としつつも、トラクション制御と走行制御とが干渉してしまうのを防止する。
【解決手段】走行制御装置は、トラクション制御による駆動力制御期間中の駆動トルク最小値を取得し(ステップS5)、トラクション制御が終了したとき、ACCによる駆動トルク制御の上限値を規定する駆動トルク上限値にその駆動トルク最小値を設定する(ステップS7)。
(もっと読む)
車両用定速走行制御装置
【課題】 実際に車両が制動可能であるにもかかわらず、信号等の軽微な故障によって定速走行制御が解除されるのを回避することができる車両用定速走行制御装置を提供する。
【解決手段】 あらかじめ設定された設定車速を維持して車両を定速走行させる車両用定速走行制御装置において、制動系の制動動作を検出する制動動作検出手段(マスタシリンダ圧センサ17、ホイールシリンダ圧センサ30)と、制動動作が検出された場合、定速走行を解除する定速走行解除手段と、を備える。
(もっと読む)
車両の走行安全装置
【課題】安全装置の作動許容範囲を拡大する。
【解決手段】自車両の車両状態を検出する車両状態検出部13と、記憶部11の道路データに基づき自車両の進行方向に存在するカーブの形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、自車両の車両状態と適正車両状態とを比較する比較部17と、自車両の旋回状態を検知する旋回状態検知手段と、自車両の車両状態が適正車両状態にないときに自車両に設けられた安全装置20の作動を許容し、自車両が旋回状態であることが検知された場合に安全装置20の作動を行わない作動部18と、を備える車両の走行安全装置10であって、自車両がカーブ進入初期状態であるか否かを判定するカーブ進入初期状態判定部15を備え、作動部18は自車両がカーブ進入初期状態である場合には安全装置20の作動を許容する。
(もっと読む)
車両用減速意志判定装置および走行制御装置
【課題】運転者の運転意志を適切に検知して他車両に対する車間制御を適切に行う。
【解決手段】車両用減速意志判定装置20aを、運転者のアクセルペダル操作を検出するアクセルペダルセンサ15と、運転者の減速意志の有無を判定するための判定条件を設定する判定条件設定部24と、運転者によるアクセルペダル操作と判定条件とに基づいて、運転者の減速意志の有無を判定する運転意志判定部25と、物体検出部21により検出された物体のうち制御対象となる物体を抽出するの制御対象抽出部22と、制御対象と自車両との相対距離および相対速度からなる相対関係を算出する相対関係算出部23と、該相対関係算出部23の出力に基づいて判定条件を変更する判定条件設定部24とを備えて構成した。
(もっと読む)
車両の制御装置
【課題】駆動力を維持しつつ、制動力によって車体速度を制御することにより、適切に上り勾配を上らせることが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、車体速度が目標速度に維持されるように駆動力及び制動力を制御する。具体的には、車両の制御装置は、車体速度が目標速度よりも上昇した場合に、駆動力を所定値以上に維持する制御、及び、車体速度が目標速度に維持されるように、車両に制動力を付与する制御を行う。これにより、例えば下り勾配を抜け出して上り勾配を走行する場合において、上り勾配を上るのに十分な駆動力を確保しておくことができるため、大きな失速などを生じることなく上り勾配を適切に上ることが可能となる。即ち、上記したような路面を、概ね定速度でスムーズに走行することができる。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。このときに、段階的な制動制御の実行中に運転者の急制動操作を検出したときには段階的な制動制御を中止して所定の制動力または制動減速度(例えば、自車が有する最大の制動力または制動減速度)により制動を実行する。この際に、運転者の急制動操作を、単に自動制動制御にそのまま優先させるのではなく、運転者の行う急制動操作よりもさらに急峻に所定の制動力または制動減速度を発揮させる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】作動中の制御を運転者に確実に認識させる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて障害物に対するリスクポテンシャルを算出する。システムAではアクセルペダル反力と制駆動力によりリスクポテンシャルを運転者に伝達するRP伝達制御を行い、システムBでは自車両を先行車に追従させるように制駆動力を制御する先行車追従走行制御を行う。システムAが作動オフ状態かつシステムBが作動オン状態で、アクセルペダルの踏み込み操作によってシステムBの制御がオーバーライドすると、アクセルペダル反力を軽くすることによってシステムAが作動しないことを報知する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】自車両の停止時におけるショックを抑制することができる車両走行制御装置および車両走行制御方法を提供すること。
【解決手段】車両走行制御装置1は、自車両を停止させるための減速制動力、あるいは当該自車両の停止状態を保持するための停止保持制動力を当該自車両に与えるブレーキ装置5と、自車両の車速を検出する車輪速センサ4、この車輪速センサ4による自車両の車速の検出ができなくなる検出不可状態となってから、ブレーキ装置5により自車両に与える制動力を減速制動力から停止保持制動力に切り換える停止保持制御部23の切換部23aと、検出不可状態となってから、ブレーキ装置5により当該自車両に与える制動力を減速制動力から停止保持制動力に切り換えるまでの切換間隔を、この検出不可状態におけるこの自車両に与えられる制動力の大きさに基づいて設定する切換間隔設定部23bとを備える。
(もっと読む)
車両の運転支援装置
【課題】現在の車両挙動のみならず、今後予想される車両挙動をも考慮して車両の加減速度を適切に抑制し、先行車追従に際して円滑で違和感のない快適な制御を可能とする。
【解決手段】追従走行制御の追従加減速制御において、演算した目標加減速度aを、自車速V0と自車両1に対する先行車の相対位置とに基づき自車両1が先行車に追従するのに必要な目標ヨーレートγt(高速時)に応じて設定する制限値Lm、或いは、自車両1に対する先行車の相対位置に基づき自車両1が先行車に追従するのに必要な目標ステアリング角St(低速時)に応じて設定する制限値Lmで制限する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】車両の走行状態に応じて、加減速を滑らかに行い、設定された目標減速度に対する追従性を向上することができる車両走行制御装置および車両走行制御方法を提供すること。
【解決手段】要求制駆動力F(要求)を取得し(ステップST401)、実加速度RGを取得し(ステップST402)、車速およびシフトポジションを取得し(ステップST403)、この取得した車速およびシフトポジションに基づいて、自車両に搭載されているエンジンのスロットルバルブを全閉にした状態における全閉時推定制駆動力F(下限)を取得し(ステップST404)、自車両の質量mを取得し(ステップST405)、要求制駆動力F(要求)と、実加速度RGと、全閉時推定制駆動力F(下限)とに基づいて、全閉時推定制駆動力F(下限)を自車両に発生させた際の全閉時予測実加速度FGを算出する(ステップST406)。
(もっと読む)
車両の走行制御装置
【課題】車間距離検知手段により検知される車間距離が目標車間距離を維持するように自車両の加減速手段を制御する場合に、該制御により自車両を減速させる際に、自車両の乗員に対し違和感を与えないようにする。
【解決手段】車間距離検知手段により検知された車間距離と目標車間距離との差に基づいて目標加減速度Actを設定し(ステップS8)、この設定された目標加減速度Actが減速度である場合に、車間距離検知手段により検知された車間距離に応じて補正係数Jを設定して、上記目標加減速度Actに、その補正係数Jを乗算した値に基づいて、加減速手段の制御目標値を設定する(ステップS9〜S11)。
(もっと読む)
車両のクルーズコントロール装置
【課題】ドライバの操作に基づいてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】前走車との車間距離を維持するクルーズコントロールを行う車両のクルーズコントロール装置において、クルーズコントロール時に検出される前走車との車間距離に応じて制御減速度を算出する制御減速度算出手段(ステップ2)と、検出されるフットブレーキペダルの踏み込み量に応じて操作減速度を算出する操作減速度算出手段と、制御減速度と操作減速度のうち常に大きい減速度を選択して車両の制動を行う車両制動手段(ステップ7)と、フットブレーキ踏み込みを検出したら、所定の短時間、制御減速度をフットブレーキ踏み込みからの経過時間に応じて減少させてからクルーズコントロールを解除するクルーズコントロール解除手段(ステップ5、6)とを備えた。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。さらに、運転者が乗客や貨物の種別または重量に応じて減速の緩急の異なる制動パターンを選択できるようにする。さらに、運転者による車間距離警報の設定距離に応じて運転者の心理状態を把握し、これにより最適な制動パターンを選択する。
(もっと読む)
車両の走行制御装置
【課題】 自動走行制御可能な車両が停止中に自動走行制御が解除された場合であっても、車両の不意の動き出しを防止することができる走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や自車の車速に基づいて、先行車を追従する先行車追従制御を行う。制御解除部22は、レーダセンサ3などの各種機器に故障が生じた場合、車間制御部21の制御を解除する。この車間制御部21の制御を解除する前に、ドライバに制動操作を促す報知を行い、ドライバの制動操作を検出した後に車間制御部21の制御を解除する。
(もっと読む)
運転支援装置、運転支援システムおよび運転支援プログラム
【課題】的確な運転支援を可能にする運転支援装置、運転支援システムおよび運転支援プログラムを提供する。
【解決手段】本運転支援システムによると、他車両100のナビゲーション装置120では、他車両100の制動に関する他車制動情報を生成し、それをランプ制御ECUに出力して、他車両100の外部にブレーキランプ146による光データを送信する。自車両200では、他車両100のナビゲーション装置120から出力された他車制動情報を取得し、これに基づいて自車両200の制動に関する自車制動情報を生成しこの自車制動情報をディスプレィや制動アシストECUに出力する。これにより、他車両100の制動に関する他車制動情報に基づいて当該他車両100の将来の挙動を予測することがある程度可能になるため、このような予測可能な他車両100の将来の挙動をも踏まえて自車制動情報を生成することができ、的確な運転支援を可能にする。
(もっと読む)
自動車の走行制御装置
【課題】
先行車の追従走行時において、ドライバーに違和感のない加減速を実現する自動車の走行制御装置を提供することを目的とする。
【解決手段】
先行車を追従走行しているときに、先行車のカーブ進入速度と先行車までの距離を記憶部16に記憶しておき、自車がその地点に到達したときに記憶した先行車の速度以下となるように、例えばスロットル24,変速機26,ブレーキアクチュエータ27の少なくとも1つを用いて自車速度を制御する自車速度の制御を行う。
(もっと読む)
1 - 20 / 43
[ Back to top ]