
Fターム[3D046GG09]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | 懸架装置(サスペンション) (64)
Fターム[3D046GG09]に分類される特許
41 - 60 / 64
ローパスフィルタ処理信号にて制駆動力配分を行う車輌
【課題】制動力または駆動力の前後輪配分手段の低周波特性を考慮しつつ制動力または駆動力の前後輪への配分と車輪接地荷重の前後輪への配分の協調を図る。
【解決手段】制動力または駆動力の前後輪配分比が目標値として与えられたときにはそれに車輪接地荷重の前後輪配分を追随させ、車輪接地荷重の前後輪配分比が目標値として与えられたときにはそれに制動力または駆動力の前後輪配分を追随させるよう、前後輪負担率比を所定の制御値に維持することを介して両者を協調させ、その際制動力または駆動力の前後輪配分手段は制動力または駆動力の前後輪配分比を示す信号をローパスフィルタにて処理した信号により作動させる。
(もっと読む)
車輌の走行運動制御装置

【課題】アクティブスタビライザ装置が正常であるか否かを考慮して目標ヨーレートを適正な値に演算し、アクティブスタビライザ装置が異常である場合にも車輌の走行運動の制御を適正に行う。
【解決手段】前輪側アクティブスタビライザ装置16は正常であるが後輪側アクティブスタビライザ装置18が異常であるときには(S20、50)、後輪側アクティブスタビライザ装置18の作動が中止されると共に、目標ヨーレートγt演算用のスタビリティファクタKhが二つのアクティブスタビライザ装置が正常である場合の値Kh0以上のKh1に設定され(S220、240、250)、後輪側アクティブスタビライザ装置18は正常であるが前輪側アクティブスタビライザ装置16が異常であるときには(S20、50)、スタビリティファクタKhがKh1よりも大きいKh2に設定され(S220、240、260)、目標ヨーレートγtの大きさが小さくされる。
(もっと読む)
車両用操舵装置
【課題】 目標ヨーモーメントにより近いモーメント応答を実現できる車両用操舵装置を提供する。
【解決手段】 制御装置部2は、ヨーモーメント制御の応答遅れを補償する目標ジャイロモーメントを算出する目標ジャイロモーメント演算部2cと、この目標ジャイロモーメントが得られるように、車輪のキャンバ角を制御する目標キャンバ角演算部2eと、を備える。
(もっと読む)
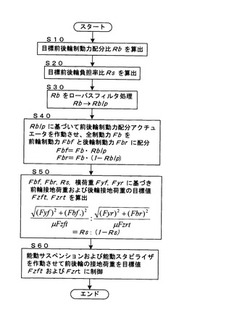
能動サスペンションと能動スタビライザとを協調作動させる車輌
【課題】能動サスペンションと能動スタビライザとを有する車輌に於いて、車輪接地荷重の配分制御に能動サスペンションと能動スタビライザとを同時に協調作動させ、能動サスペンションおよび能動スタビライザのいずれについても、その作動性能および耐久性を最大限に発揮させる車輌を提供する。
【解決手段】各車輪について能動サスペンションおよび能動スタビライザのそれぞれの制御により得られる許容車輪接地荷重の最大値を推定し、各車輪の目標接地荷重を能動サスペンションおよび能動スタビライザが各々の許容車輪接地荷重最大値の相対比に応じた車輪接地荷重にて分担するようにする。
(もっと読む)
車輪負担率配分や操舵性能の制御を安定化した車輌
【課題】車輪駆動力配分手段、車輪制動力配分手段、能動サスペンション、能動スタビライザのいずれかに作動異常が生じたときにも、車輪負担率配分や操舵性能を安定に保つ車輌を提供する。
【解決手段】車輪駆動力配分手段、車輪制動力配分手段、能動サスペンション、能動スタビライザを有し、車輪接地荷重に対する車輪の駆動力または制動力の比を制御する車輌に於いて、車輪駆動力配分手段や車輪制動力配分手段を第一の側とし、能動サスペンションや能動スタビライザを第二の側とするとき、第一または第二の側の一方に異常が生じたとき、それに応じて他方の側の作動目標値を変更する。
(もっと読む)
車輪接地荷重配分をフィードフォワード制御する車輌
【課題】車輪の駆動力や制動力の大きさに対応した車輪接地荷重の制御が高い効果を発揮するのは、それが急速に変化すべき緊急時であることに鑑み、車輪の駆動力や制動力の迅速な制御による変化を有効に機能せしめる車輪接地荷重制御がなされる車輌を提供する。
【解決手段】車輪制動力または車輪制動力の車輪間配分に応じて能動車輪サスペンションまたは能動車輪サスペンションと能動スタビライザとをフィードフォワード制御またはそれとフィードバック制御の組合せにより制御して車輪接地荷重の車輪間配分を行う。
(もっと読む)
車両統合制御装置
【課題】 各制御ユニットの要求を適切に調停できる車両統合制御装置の提供。
【解決手段】 本発明による車両統合制御装置では、複数の制御ユニットのうちの特定のマネージャ制御ユニットが、乗員の要求又は第1の他の制御ユニット(P−DRM,DSS)からの要求に基づいた第1の物理量次元の制御目標値と、第2の他の制御ユニット(VDM)からの第1の物理量次元の要求値とを調停する第1の調停部と、第1の調停部で調停を経た第1の物理量次元の制御目標値を、第2の物理量次元の制御目標値に変換する変換部と、変換部で第2の物理量次元に変換された制御目標値と、T/M制御ユニットからの第2の物理量次元の要求値とを調停する第2の調停部と、第2の調停部で調停を経た制御目標値を、該制御目標値を実現すべきエンジン制御ユニットへと出力する出力部とを備える。
(もっと読む)
車両制御装置
【課題】 第1の要求制駆動力(例えばドライバ要求制駆動力)と第2の要求制駆動力(例えばクルーズ要求制駆動力)との調停を行うシステムにおいて、ロバスト性確保の要求を満たしながら制振制御のシステム設計を簡略化できるようにする。
【解決手段】 ドライバ要求制駆動力演算手段12で演算したドライバ要求制駆動力u1 を制振フィルタ14でフィルタリングし、このドライバ要求制駆動力u1 の波形から車両のばね上の振動を誘発する所定周波数帯域の成分を除去する。この制振フィルタ14でフィルタリングしたフィルタ後ドライバ要求制駆動力y1 とクルーズ要求制駆動力演算手段13で演算されたクルーズ要求制駆動力u2 とを調停手段15によって比較して大きい方を最終要求制駆動力yとして選択する。このようにすれば、車両のばね上の振動を誘発する成分を含まないクルーズ要求制駆動力u2 に対しては制振フィルタ14を作用させずに済む。
(もっと読む)
RFIDセンサによるタイヤ歪み測定システム
【課題】 バッテリーを使用することなく、構造的に簡易で安価なシステム構成にてタイヤ歪みを測定することができる、RFIDセンサによるタイヤ歪み測定システムを得る。
【解決手段】 タイヤ内に、タイヤ歪みを抵抗値変化により検出するための磁気センサと歪み量に応じて磁気センサの抵抗値を変化させるためのマグネット及び当該磁気センサを接続して情報伝送を行うためのRFIDセンサから成るセンサユニットを内蔵し、各タイヤハウス内に、前記センサユニットのRFIDセンサと無線通信を行い応答信号よりRFIDセンサのID情報及び抵抗値を電圧信号に変換してスケーリングしたデータから成る計測データを読取るためのリーダーを配設し、各リーダーから得られた計測データを演算処理して各タイヤの歪みを測定するための演算制御装置と、タイヤ歪み情報を運転者に知らせるためのモニタとを備えて構成する。
(もっと読む)
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
車両制御装置
【課題】 停止距離の短縮と再発進性とを両立させることが可能な車両制御装置を提供する。
【解決手段】 車両制御装置は、路面の走行抵抗を検出するとともにABS制御を行う車両運動制御ECU9と、車両Vの車高を調整する車高制御ECU17とを備える。車両運動制御ECU9は、走行抵抗が大きな路面を走行中であると判定された場合に、制御の介入を遅らせるようにABS制御の制御特性を変更する。車高制御ECU17は、走行抵抗が大きな路面を走行中であると判定されかつABS制御が実行される場合に、車両速度が低くなるほど車両Vの車高を上昇させる。
(もっと読む)
ブレーキ液圧制御装置
【課題】ブレーキシリンダ液圧の実際値が目標値に近づくように、液圧制御アクチュエータを制御する場合の制御ゲインを適切な大きさに決定する。
【解決手段】ブレーキシリンダ液圧の実際値が目標値に近づくように、リニアバルブへの制御指令値が作成される場合の制御ゲインが作動液の温度が設定温度以下の場合には、大きい値とされる。それによって、作動液の温度が低く、粘性が高くなることに起因する制御遅れを小さくすることができる。また、アンチロック制御等のスリップ制御中である場合にも制御ゲインが大きい値とされる。それによって、スリップ制御中である場合に応答性を高くすることができ、スリップ状態を速やかに適正状態にすることができる。
(もっと読む)
車輌の停止挙動制御装置
【課題】車輌の制動停止時に於ける車輌の前後加速度の急激な変化が減少するよう制動力を制御することにより、車輌の制動停止時に乗員が感じる不快感を効果的に低減する。
【解決手段】運転者の制動操作量に基づき車輌の目標減速度Gtが演算され(S20)、車輌の制動停止時であると判別されると(S40、50)、車輌の減速度Gbxに対する車速Vの比V/Gbxが小さいほど小さくなるよう目標減速度低減のゲインKgが演算され(S80)、車輌の減速度Gbxに対する車速Vの比V/Gbxが小さいほど小さくなるよう制動力の後輪配分比Krsが演算され(S90)、補正後の車輌の目標減速度Gtaが減速度低減のゲインKgと車輌の目標減速度Gtとの積として演算され(S100)、制動力の後輪配分比Krsにて補正後の車輌の目標減速度Gtaが達成されるよう各車輪の制動力が制御される(S110、120)。
(もっと読む)
自動二輪車のブレーキ制御装置
【課題】 車両状態に対応した最適なABS作動開始制御を行うことで後輪の接地圧を十分に確保することができる車両のブレーキ装置を提供する。
【解決手段】 後輪の接地荷重の大幅な減少可能性を判定し、この判定結果に基づいてABS作動開始スリップ率を変化させるこで、二人乗りの場合や、荷物を積載している場合には急ブレーキによる後輪の接地荷重の大幅な減少可能性が低いと判定することができる。非積載の場合には、アンチロックブレーキシステムが作動するまでに後輪側の接地荷重の大幅な減少可能性が高いと判定する。
(もっと読む)
車両運動制御装置
【課題】 タイヤの状態を精度よく検出して車両の運動制御に反映させる。
【解決手段】 車両運動制御装置1は、車体に設置されたタイヤ温度検出手段5および実舵角検出手段8によりタイヤ温度およびタイヤ実舵角を検出し、これをステアリング制御手段11による車両のステアリング制御に反映させる。
(もっと読む)
車両駆動制御システム及びセンサユニット並びにタイヤ
【課題】各タイヤに生ずる加速度を高精度で容易に検出すると共にタイヤの接地パターンを検出して車両の安定性制御を行う車両駆動制御システム及びそのセンサユニット並びにタイヤを提供する。
【解決手段】車両1の各タイヤ2に設けたセンサユニット100によってX,Y,Z方向に発生する加速度を検出すると共に、Z軸方向加速度信号に重畳する低い周波数のノイズ成分と高い周波数のノイズ成分とを抽出し、電磁波によって検出結果のディジタル値をディジタル情報としてモニタ装置200に送信する。モニタ装置200は、予め記憶されている多数のタイヤ接地パターン情報とこれらのディジタル情報を比較することによりタイヤ接地パターンを特定し、この情報をスタビリティ制御ユニット700に出力する。
(もっと読む)
車両の制駆動力制御装置
【課題】 各車輪の制駆動力を個別に制御して、車体のバウンシングを抑制する。
【解決手段】 制駆動力制御装置は、左右前後輪Wfl,Wfr,Wrl,Wrrをそれぞれ懸架するサスペンションSfl,Srl,Sfr,Srr、各車輪を個別に駆動する電動モータ21〜24、ばね上加速度センサ31a〜31dおよびコントローラ34を備える。コントローラ34は、検出されたばね上加速度に基づいて計算された車体の平均ばね上変位および平均ばね上速度に応じて、各車輪に付加すべき駆動力または制動力を計算する。走行時の駆動力に計算された駆動力または制動力を付加することにより、車体のバウンシング時に上昇した車体(サスペンションにより規定される各瞬間中心)に下方向の力を発生させ、下降した車体に上方向の力を発生させる。車輪の上下振動を許容するように同車輪に対して上下方向の力を発生させることにより、接地荷重の変動を抑制することもできる。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両挙動制御装置
【課題】 走行フィーリングを低下させることなく車両の挙動を安定化させる車両挙動制御装置を提供することを課題とする。
【解決手段】 前輪のロール剛性を調節する前輪ロール剛性調節手段30と、後輪のロール剛性を調節する後輪ロール剛性調節手段31と、前輪のロール剛性及び後輪のロール剛性を制御するロール剛性制御手段10と、車両のオーバステアの程度を示すスピン状態量を演算するスピン状態量演算手段11と、車両のアンダステアの程度を示すドリフト状態量を演算するドリフト状態量演算手段11とを備え、ロール剛性制御手段10は、スピン状態量がスピン側ロール剛性閾値以上の場合には前輪のロール剛性を増加制御又は後輪のロール剛性を減少制御し、ドリフト状態量がドリフト側ロール剛性閾値以上の場合には後輪のロール剛性を増加制御又は前輪のロール剛性を減少制御することを特徴とする。
(もっと読む)
車両の制御装置
【課題】 コンピュータのプログラム処理による車両の制御装置において、制御内容の一部変更、一部削除および追加を簡単に行えるようにする。
【解決手段】 電子制御ユニットは、センサ装置により検出された運転操作量または運動状態量を用いて、プログラム処理によりアクチュエータを駆動制御する。このプログラムは、上流の演算グループの演算結果を用いた演算処理によって得た演算結果を下流の演算グループの演算処理のために渡すように複数の演算グループに分けられる。各演算グループは、さらに複数の演算ブロックに分けられ、各演算ブロックに対応したプログラムが独立して記憶される。演算プログラムの記憶位置を表すポインタ値がテーブルに記憶され、各演算プログラムはポインタ値を用いて指定される。
(もっと読む)
41 - 60 / 64
[ Back to top ]