
Fターム[3D046GG09]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | 懸架装置(サスペンション) (64)
Fターム[3D046GG09]に分類される特許
21 - 40 / 64
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
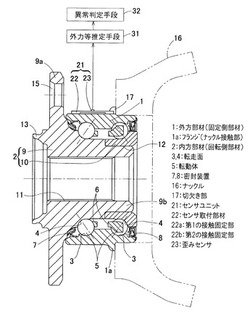
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。外方部材1は、ナックル16と接触するナックル接触部1aの一部に切欠き部17を有する。
(もっと読む)
センサ付車輪用軸受

【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。センサ取付部材22は、外方部材1に固定するための2箇所の接触固定部22a,22bを有する。第1の接触固定部22aは車体の懸架装置16に固定する。第2の接触固定部22bは、外方部材1の周面に固定する。
(もっと読む)
車輪可動装置
【課題】車輪の舵角制御と制駆動力の制御を併用して車両の旋回性能を高める仕組みを簡素にするのにより好適な車輪可動装置を実現する。
【解決手段】車輪可動装置は、車両の後輪10a,10bに制駆動力を個別に付与するモータ12a,12b及びブレーキ13a,13bと、後輪10a,10bの間を連結するサブフレーム14を備え、サブフレーム14は、各後輪10a,10bに付与される制駆動力の差に起因するモーメントによって車両の旋回方向に回動して後輪10a,10bの向きを可変する。
(もっと読む)
自動車の操縦性制御装置
【課題】アクティブサスペンション装置が故障した際にも旋回安定性を確保することのできる操縦性制御装置を提供する。
【解決手段】アクチュエータで駆動されるアクティブサスペンション装置が少なくとも後車輪に設けられた自動車において、制動力または駆動力の少なくともいずれか一方を制御してアンダーステア傾向を抑制させる旋回特性制御手段と、アクティブサスペンション装置の異常の有無を判別する故障診断手段とを有するものとし、アクティブサスペンション装置が異常と判断されたときは、アンダーステア抑制効力を通常時よりも大きくする。
(もっと読む)
車両の運動制御装置
【課題】車体に対する統合ユニットの搭載姿勢が基準姿勢から傾いた可能性がある場合において適切な処置を行うことができる車両の運動制御装置を提供すること。
【解決手段】この装置では、制御ユニット(HU40)とブレーキコントローラ50とが一体化されてなる統合ユニットIUに車両挙動センサ63,64,65が一体的に配設されている。この装置は、統合ユニットIUの近傍に搭載されているエアバック展開制御用の加速度センサ81frの出力値が車両の衝突等に起因して所定のしきい値を超えた場合、「車体に対する統合ユニットIUの搭載姿勢が基準姿勢から所定の程度よりも大きく傾いた可能性がある」と判定して、ESC制御の実行を禁止し、且つ、車両の運転者に対して統合ユニットIUの搭載姿勢の異常発生を知らしめて統合ユニットIUの搭載姿勢の調整に係わる修理を促すために警告ランプ66を点灯する。
(もっと読む)
車両の制御装置
【課題】 各種電子制御ユニットを統合協調制御可能な車両の制御装置を提供することである。
【解決手段】 車輪速度を検出する車輪速度センサと、前記車輪速度センサに接続され、該車輪速度センサが検出した車輪速度に基づいて車輪の制動力及び駆動力を制御する制・駆動力制御ユニットと、運転者による操舵情報を検出する操舵情報センサと、前記操舵情報センサに接続され、該操舵情報センサが検出した操舵情報に基づいて車輪の操舵量を制御する操舵制御ユニットとを備えた車両の制御装置において、車両の慣性力を検出する慣性力センサと、前記慣性力センサに接続されるとともに、前記制・駆動力制御ユニット及び前記操舵制御ユニットと双方向通信可能に接続され、前記慣性力センサで検出した車両の慣性力及び前記制・駆動力制御ユニットと前記操舵制御ユニットの制御状態に基づいて、前記制・駆動力制御ユニット及び前記操舵制御ユニットの制御量又は制御補正量を決定して出力する協調制御ユニットとを具備したことを特徴とする。
(もっと読む)
車体姿勢制御装置
【課題】車両の旋回時におけるローリングとピッチングとを共に制御し得る車体姿勢制御装置を得る。
【解決手段】ロール角取得部により取得された車体6のロール角を適切な大きさに抑制するロール制御部と、ロール角に応じて車体のピッチ角を制御するロール角対応ピッチ角制御部とを設ける。ロール制御部を、ショックアブソーバ28の減衰特性の制御によりローリングを抑制する減衰特性依拠ロール制御部とし、ロール角対応ピッチ角制御部を、過渡旋回状態においては、ショックアブソーバ28の減衰特性の制御により、定常旋回状態においては、ブレーキ制御ECU20による前後加速度の制御により、それぞれピッチ角を制御するものとする。ロール角対応ピッチ角制御部を、過渡旋回状態および定常旋回状態の両方において前後加速度の制御によりピッチ角を制御するものとすることもできる。
(もっと読む)
物体検出装置
【課題】レベルの異なる2つの閾値を用いて高閾値物体と低閾値物体とを検出する場合の検知感度の拡大と物体検出の信頼性の確保とが可能な物体検出装置を提供すること。
【解決手段】検出された高閾値物体候補数Hth_Numと低閾値物体候補数Lth_Numとの総和が検出結果として出力可能に設定された所定の最大物体数Nmaxを超える場合に(ステップS4:Yes)、高閾値物体候補からの選択が優先されるように高閾値物体候補および低閾値物体候補からの選択処理を割り振って高閾値物体および低閾値物体を検出結果として選択するようにした(ステップS6〜S10)。
(もっと読む)
車両制動装置
【課題】 車両の製造コストの増大を抑えつつ、車両の制動力を向上した車両制動装置を得る。
【解決手段】 ホイールモータ14を支持する車体との間に、タイヤ16のキャンバ角θを変更する為のキャンバ角操作機構20が更に配置される。キャンバ角操作機構20は、車両12の4つのタイヤ16に対応してそれぞれ配置される。4つのタイヤ16のキャンバ角θを一斉に大きくするのに伴い車体が低下して、車体の下面が路面Rに近づくことになる。車両12の下部とされるホイールモータ14の下側部分には、ゴム製で下面が平面状に形成された平面状ブレーキ部材及び、金属製で下面が爪状に形成された爪状ブレーキ部材が配置される。車両12の状態を検出するための状況検出装置30が車両12に搭載される。
(もっと読む)
車両制動距離予測装置および車両制動距離予測方法
【課題】走行中の車両の制動距離について定量的に予測することができる、車両制動距離予測装置および車両制動距離予測方法を提供する。
【解決手段】車両が走行している最中の、タイヤの所定部位の時系列の加速度データを取得し、所得した前記加速度データから、タイヤの変形に基づく加速度成分を除去して、タイヤの変形に基づく加速度成分が除去された、変形成分除去後加速度データを周波数分析して周波数スペクトルを求め、周波数スペクトルの積算値を求めるとともに、求めた前記積算値に基づいて、制動距離を予測するための制動距離パラメータを算出し、算出された前記制動距離パラメータに基づいて、車両の制動距離の予測値を求める。
(もっと読む)
車両の衝突安全制御装置
【課題】安全なブレーキ制動を確保したうえで、衝突不可避時の制動距離を従来のものより縮めることができ、より安全な衝突安全制御を行う衝突安全制御装置を提供する。
【解決手段】衝突判断によるの制動動作に併せて車高を上昇させていく車高調整制御を行うことにより、制動に適切な輪荷重を確保して減速度を高める。
(もっと読む)
車両制御システム
【課題】ブレーキ作用中に車高調整が行われる場合に生じる事態を抑制しつつ、車高調整が速やかに行われるようにする。
【解決手段】サスペンションの構造により車高が変化するとホイールベースも変化するのが普通である。そのため、ブレーキ作用中に車高調整が行われると、サスペンション等が弾性変形し、前後力が加えられる。前後力により車輪が強制的に移動させられると大きな音がする。また、目標車高に達するまでに、より多くの作動液が供給されたり多くの作動液が流出させられたりする。そのため、余分なエネルギが消費されたり、ブレーキ作用力が0とされた場合に車高が大きく変化したりする。それに対して、車高調整中に前輪と後輪とのいずれか一方のブレーキ作用力が小さくされれば(S56)、車高調整に伴うホイールベースの変化を許容することができるため、上述の問題を回避しつつ車高調整を速やかに行うことが可能となる。
(もっと読む)
鉄道車両用ブレーキ制御システム
【課題】滑走の発生を低減させることにより制動距離を短くし車輪踏面の損傷を低減する鉄道車両用ブレーキ制御システムを提供する。
【解決手段】機械ブレーキ力に応じて制御対象となる第2の車軸のそれぞれにブレーキ力を生じさせる複数のブレーキ制御手段と、各第2の車軸に関する滑走度合をそれぞれ推論し滑走防止弁の開閉制御を行う複数の滑走防止制御手段と、編成全体で必要なブレーキ力のうち上記複数のブレーキ制御手段が生じさせるべき不足ブレーキ力を算出し、上記複数のブレーキ制御手段のそれぞれで分担する機械ブレーキ力を決め機械ブレーキ指示をする編成ブレーキ制御手段とを備えるブレーキ制御システムであって、上記編成ブレーキ制御手段が、上記決定された各ブレーキ制御手段の分担する機械ブレーキ力を上記複数の滑走防止制御手段により推論された滑走度合に基づいて前記不足ブレーキ力を満たすように動的に変更する変更手段を備える。
(もっと読む)
旋回挙動制御装置、自動車、及び旋回挙動制御方法
【課題】車両の旋回時に、旋回挙動の安定を維持しつつ、より高い旋回性を実現すること。
【解決手段】前輪のステアリング系統とは独立して後輪を転舵可能な転舵機構4と、左右輪の制動トルクを個別に制御可能なブレーキアクチュエータ5とを備え、車両の旋回挙動に応じて、前後輪の転舵が逆位相となるように転舵機構4を駆動制御すると共に、旋回内輪よりも旋回外輪の制動トルクが大きくなるようにブレーキアクチュエータ5を駆動制御する。すなわち、転舵機構4によって後輪を前輪と逆位相に転舵し、この転舵によって旋回方向のヨー運動が助長される分、ブレーキアクチュエータ5によって旋回外輪の制動力を増加させる。このとき、前輪舵角の変化に対して、つまり運転者のステアリング操作に対して所定の応答遅れをもって、後輪を転舵すると共に、旋回外輪に制動トルクを発生させる。
(もっと読む)
車両の荷重推定方法および装置、ならびに車両の荷重推定のためのプログラム
【課題】車両に特別な荷重センサを設けることなく、かつ煩雑な計算プログラムを必要とせず、比較的容易に車両の荷重状態を推定する方法を提供する。
【解決手段】制動時または駆動時におけるGPSを利用して得られた車両速度から車両加速度を算出する工程、該車両加速度を算出する時間間隔ごとに、制動時の制動力または駆動時の駆動力を算出する工程、該車両加速度および制動時の制動力または駆動時の駆動力の関係から車両の荷重を推定する工程を含む車両の荷重推定方法である。
(もっと読む)
車輌の走行制御装置
【課題】運転者により急制動操作及び操舵操作が行われたときにも運転者の急制動要求を満たしつつできるだけ運転者の希望通りに車輌を旋回させ得るようにする。
【解決手段】ブレーキアシスト制御が実行され(S220)、運転者による緊急回避操舵の可能性があると判別されると(S240)、マスタシリンダ圧力の増大率ΔPmが大きいほど大きくなるよう運転者による緊急回避操舵の可能性の指標値Ksが演算され(S270)、指標値Ksが大きいほど小さくなるよう前輪の目標ロール剛性配分比Rsftが演算され(S300)、前輪の目標ロール剛性配分比Rsftに基づきアクティブスタビライザ装置16及び18が制御されることにより(S310)、緊急回避操舵の可能性が高いほどロール剛性の前後輪配分比が後輪寄りに制御され、車輌のステア特性がオーバーステア側へ変化される。
(もっと読む)
過給機を備える内燃機関の制御
【課題】過給機を備える内燃機関のエンジンブレーキによる制動力を調整することのできる技術を提供することを目的とする。
【解決手段】
過給器は、内燃機関からの排気ガスによって駆動されるタービンと、タービンの回転速度を調整する回転速度調整部とを、を備える。ここで、ユーザの要求する車両の制動力の強さに相関のあるパラメータを含む制御パラメータに基づいてタービンの目標回転速度を決定し、車両の制動時にタービンの回転速度が目標回転速度に近づくように回転速度調整部を制御する。
(もっと読む)
車両挙動制御装置及びスタビリティファクタ予想装置
【課題】
車両挙動制御装置により、車両の挙動を、ランフラット走行時にも適切に制御できるようにする。
【解決手段】
車両挙動制御装置は、ランフラットタイヤを装着した車両の挙動を制御する。通常走行時における車両の横加速度に対する通常時スタビリティファクタを導出する導出手段と、ランフラット走行時におけるランフラット時スタビリティファクタを、導出されたスタビリティファクタに基づいて予想する予想手段と、パンクした場合に、予想されたランフラット時スタビリティファクタを用いて車両の挙動を制御する制御手段とを備える。
(もっと読む)
車両用減衰力制御装置、車両用減衰力制御方法
【課題】 急制動を必要とする時の車両安定性を向上させて乗り心地を向上できる車両用減衰力制御装置等を提供する。
【解決手段】 車両に加わる振動を減衰させるショックアブソーバ3で発生する減衰力を調整するアクチュエータ2を制御するために、障害物認識装置9の認識結果によってブレーキ操作がなされる可能性を予測する機能と、ブレーキ操作がなされないことが予測された場合には、所定の減衰力を発生させるようにアクチュエータ2を制御する一方で、ブレーキ操作がなされる可能性が高いことが予測された場合には、当該ブレーキ操作がなされる前に、所定の減衰力よりも高い減衰力を発生させるようにアクチュエータ2の制御を開始する機能とをECU1に実装する。
(もっと読む)
車両制御装置
【課題】 サスペンション装置のダンパーの減衰力の制御に異常が発生したときに車輪の制動力への影響を最小限に抑える。
【解決手段】 減衰力制御手段Udによるダンパー14の減衰力の制御に異常が発生し、ダンパー14が低減衰力の状態で固定されたとき、アンチロック制御を行う制動力制御手段Ubがロック傾向になった車輪Wのホイールシリンダに伝達されるブレーキ油圧を通常時よりも早めに減少させるか、ブレーキ油圧の減少量を通常時よりも大きくすることで、アンチロック制御における車輪Wのスリップ率を適正に維持して制動距離の増加を最小限に抑えることができる。
(もっと読む)
21 - 40 / 64
[ Back to top ]