
Fターム[3D046HH18]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 燃料供給状態 (68)
Fターム[3D046HH18]に分類される特許
1 - 20 / 68
車両の横転防止装置
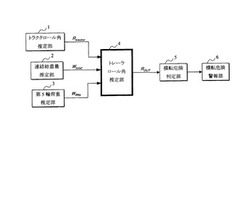
【課題】トラクタヘッド側でトレーラのロール角検出が正確に行える連結車両の横転防止装置を提供する。
【解決手段】トラクタのロール角を推定するトラクタロール角推定部(1)と、トラクタとトレーラの連結総重量を推定する連結総重量推定部(2)と、トラクタ及びトレーラを結合するカプラーが受ける荷重を推定する荷重推定部(3)と、該荷重と該連結総重量とトラクタロール角から、トレーラのロール角を推定演算するトレーラロール角推定部(4)と、を備える。
(もっと読む)
車両用駆動力制御装置

【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ点補正の誤差に起因した不適切な挙動制御を防止する車両挙動制御装置を提供する。
【解決手段】本発明の車両挙動制御装置Cでは、挙動制御の開始しきい値Thを設定するにあたって、停止中ゼロ点補正出力YR0Sと走行中ゼロ点補正出力YR0Mとの差が第1の所定値Aを超え、且つ、所定時間Tht内における停止中ゼロ点補正出力YR0Sの演算回数と走行中ゼロ点補正出力YR0Mの演算回数との差が第2の所定値Thctを超える場合に、挙動制御の開始しきい値Thを高く設定する。
(もっと読む)
車両およびその制御方法
【課題】車両の安定性が悪化するのを抑制する。
【解決手段】モータMG2のインバータ42のトランジスタのいずれかに異常が生じて閉回路が形成されたときには、ブレーキ64a,64bから前輪63a,63bに制動トルクを出力する。これにより、モータMG2の回転に伴って後輪66a,66bに作用する制動トルクとブレーキ64a,64bから前輪63a,63bに出力する制動トルクとがアンバランスになることによる車両の安定性の悪化を抑制することができる。
(もっと読む)
車輌用運転支援装置
【課題】操作者の操作によらず車輌の走行状態を自動制御する車輌において、一時停止や徐行のための運転支援を行う車輌用運転支援装置を提供すること。
【解決手段】操作者の操作によらず車輌の走行状態を自動制御する車輌用運転支援装置100は、一時停止地点または徐行区間開始地点と自車との間の距離を取得する距離取得手段63と、自車の走行状態を検知する走行状態検知手段64と、距離取得手段63により取得した距離が所定値となり、かつ、走行状態検知手段64が減速状態を検知しない場合に、一時停止または徐行のための運転支援を行う運転支援手段65と、を備える。また、運転支援手段65は、距離取得手段63により取得した距離が所定値となり、かつ、走行状態検知手段64が、自動制御による減速状態を検知しない場合にも、一時停止または徐行のための運転支援を行う。
(もっと読む)
物体検知装置
【課題】レーダ装置を用いて先行車などの物体を検知すると共に、より簡易な構成で虚像を実際の物体(実像)と誤認するのを防止する物体検知装置を提供する。
【解決手段】検知された第1の物体(物体104)と車両(自車)10の間に第2の物体(物体102)が検知されると共に、検知された第1の物体の相対距離r1+r2が検知された第2の物体の相対距離r1の整数倍(例えば2倍)であり、車両の移動速度v1,v1’と検知された第1の物体の移動速度(相対速度)v2,v2’が等しく、かつ検知された第1の物体の相対角度が同一(θ1=θ2)であるとき、検知された第1の物体は虚像であると判定する。
(もっと読む)
車両用物体検知装置
【課題】自車の進行方向に存在する物体が霧などの不規則に形状が変化し、自車が回避する必要のない気体状の物体か否か精度良く判別する車両用物体検知装置を提供する。
【解決手段】進行方向に搬送波を送信し、進行方向に存在する物体に反射させて得た反射点を2次元平面に投影して得た点群の分布を検出し(S12)、投影して得た点群の分布と予め設定された点群分布パターンを備えるテンプレートの点群分布パターンとの相関値Tを算出し(S14)、算出された相関値に基づいて前記物体の形状の不規則度を表わす評価値Eを算出し(S16)、算出された評価値に基づいて物体が回避する必要のない不規則形状物体か否か判別する(S18からS22)。
(もっと読む)
車両の走行支援装置
【課題】制駆動機構により得られる制駆動力のハンチングを抑制して、車両の乗り心地を良好とする。
【解決手段】第1制駆動機構及び第2制駆動機構により制駆動される車両に搭載され、第1制駆動機構及び第2制駆動機構から得られる制駆動力を制御する走行支援装置10であって、車両全体として得られるべき総制駆動力を示す総制駆動力指令値を求める総制駆動力指令値演算部12と、総制駆動力における第1制駆動機構の寄与分を示す第1制駆動力指令値を設定する第1制駆動力設定部13と、総制駆動力における第2制駆動機構の寄与分を示す第2制駆動力指令値として、総制駆動力指令値と第1制駆動力指令値との差分を設定する第2制駆動力設定部14と、を備える。
(もっと読む)
車両用駆動力制御装置
【課題】走行環境を走行するために適切な減速度に基づいて、運転者の減速意図に応答して減速制御を実施する車両用駆動力制御装置であって、減速の応答性に関して、運転者のフィーリングに合う減速制御を行なうことが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境を検出する手段と、前記走行環境を走行するために適切な前記車両の減速度を設定減速度として求める手段(S101)と、運転者の減速意図を検出する手段(S104)と、前記運転者の減速意図が検出されたときに前記設定減速度に基づいて前記車両の駆動力を制御する手段(S108)とを備え、予め設定された通常時に比べて、前記設定減速度が大きいときには、前記通常時に比べて前記車両に減速度が早く発生するように制御する(S107)。
(もっと読む)
車両挙動推定予測装置および車両安定化制御システム
【課題】複数の車両挙動を表す量をその特徴を反映させながら次元圧縮することで、ニューラルネットワークへの入力数の低減し、精度良く車両挙動を表す量を推定し予測することが可能な車両挙動推定予測装置およびそれを用いた車両安定化制御システムを提供する。
【解決手段】車両挙動推定予測装置1は、測定装置Sにより測定された複数の車両挙動を表す量に関するデータを砂時計型ニューラルネットワークinSNNを用いて次元圧縮させ砂時計型ニューラルネットワークinSNNの圧縮層L3からの出力を特徴量f1として抽出する特徴量抽出手段2と、抽出された特徴量f1に基づいて現在の車両挙動を表す量の推定値または一定時間後の車両挙動を表す量の予測値を出力するニューラルネットワークRNNで構成された演算手段3とを備える。
(もっと読む)
車両制御装置
【課題】 走行状態制御では先行車との衝突を回避できない場合に衝突回避制御を実行する車両制御装置において、衝突回避制御が行われるような危険な状況に陥った場合に、確実に運転者の介入を促して走行の安全性を向上させる。
【解決手段】 「キャンセル」状態の時に、セットスイッチがオンされると「制御中:車間制御」状態へ遷移して車間制御を実行する。その車間制御では先行車と衝突を回避できない場合(衝突回避警報フラグXA=1)には「制御中:衝突回避警報」状態へ遷移して衝突警報を発生させ、衝突回避に必要な要求加速度が更に増大した場合(衝突回避制御フラグXC=1)には「制御中:衝突回避制御」状態へ遷移して衝突回避制御を実行する。「制御中:衝突回避制御」状態では、衝突回避制御フラグXCのリセット、又はアクセルペダルの操作が検出されると「制御中」状態内で遷移せずに、「キャンセル」状態へ遷移する。
(もっと読む)
車両用駆動力制御装置
【課題】運転者の減速意図が検出されたときに車両の走行環境パラメータに基づいて、減速装置の係合・解放手段による係合または解放によって減速度を発生させる車両用駆動力制御装置において、運転者の減速意図を検出してから、実際に減速度が発生するまでの遅れを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて減速装置を作動させる必要があると判断したときに運転者の減速意図に基づいて前記減速装置を作動させて減速度を発生させる車両用駆動力制御装置において、前記減速装置は、係合・解放手段を有し、前記減速装置が作動したときに前記係合・解放手段の係合または解放によって減速度を発生させるものであり、前記減速装置を作動させる必要があると判断したときに、前記係合・解放手段を、前記減速装置が実質的に作動する直前の待機状態に移行させる動作を行う。
(もっと読む)
車間距離制御方法及びそのシステム
【課題】先行車両との安全走行距離をより効果的に制御するための車間距離制御方法及びシステムを提供する。
【解決手段】本発明は、走行中の路面の最大摩擦係数を検出する段階;前記検出された最大摩擦係数及び走行速度に基づいて先行車両との最小安全距離を算出する段階;前記算出された最小安全距離に対応する基準安全指数を設定する段階;先行車両との相対距離に対応する現在の安全指数を算出する段階;及び前記現在の安全指数及び前記基準安全指数を比較して車間距離を制御する段階;を含むことを特徴とする。
(もっと読む)
車両制動装置、車両制動方法および制御装置
【課題】ブレーキ効きを全輪についてまとめて推定したときの推定結果の精度に改善の余地がある。
【解決手段】車両制動装置は、車両の走行中、前輪および後輪のそれぞれについて、ブレーキペダルの踏込量から算出される目標制動力を油圧ブレーキの制動力と回生ブレーキの制動力とに配分する割合を決定する制動力配分決定部42と、決定された配分の割合に応じて油圧ブレーキの油圧を変化させる油圧制御部46と、決定された配分の割合に応じて走行モータが発生する回生トルクを変化させる回生トルク制御部48と、車両の減速度、変化させた油圧値および変化させた回生トルク値から車重およびブレーキ効きを推定する推定部50と、を備える。
(もっと読む)
車両用減速制御装置
【課題】道路形状に応じて最適に減速制御を作動させることができる。
【解決手段】車両用減速制御装置は、旋回状態で許容できる横加速度制限値を設定し(ステップS4)、その設定した横加速度制限値に基づいて、目標車速を設定する(ステップS5)。ここで、車両用減速制御装置は、自車両が走行するカーブの所定位置の旋回半径を検出し(ステップS1)、その検出した旋回半径に基づいて、横加速度制限値を補正する(ステップS3)。
(もっと読む)
車両の減速制御装置
【課題】車両に対してガード値の範囲内で減速度を付与する車両の減速制御装置であって、ガード値をより適正な値に設定することの可能な車両の減速制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて、前記車両に対してガード値の範囲内で減速度を付与する(S9、S10)車両の減速制御装置であって、運転者の操作による減速特性を判定する判定手段(S1)と、前記運転者の操作による減速特性に基づいて、前記ガード値を変更する変更手段(S4)とを備えている。前記判定手段は、運転者の操作による減速のタイミング、ブレーキの操作時間、及びブレーキ操作により発生させる減速度の少なくともいずれか一方に基づいて、前記運転者の操作による減速特性を判定することができる。
(もっと読む)
定速走行制御装置及び制御方法
【課題】オートクルーズ走行時で、降坂時のオーバーシュート量を抑制し、一定走行時の速度安定性を確保すること。
【解決手段】主制動装置B4と、複数の補助制動装置B1〜B3と、燃料噴射制御手段11と、定速走行制御を行うべく燃料噴射制御手段11をして燃料噴射量を制御せしめ且つ主制動装置B1及び複数の補助制動装置B1〜B3の作動を制御する定速走行制御手段10と、車速検出手段12と、エンジン負荷検出手段13と、を有する車両において、定速走行制御手段10は降坂時に目標車速に対して実車速が超過した場合に、最初に最も制動能力の低い補助制動装置B1を作動させ、それでも目標車速に対する実車速が超過していれば、次に制動能力の低い補助制動装置から順に作動させるべき補助制動装置B1〜B3を追加し、最後に主制動装置B4を作動させるべき制動装置に追加するように制御する。
(もっと読む)
車両の運転支援装置
【課題】先行車の走行状態を連続的に自車両に反映し、円滑な制御によりドライバが自然な感覚で利用できる。
【解決手段】走行制御ユニット5における自動追従制御では、予め設定した2つの領域からなる先行車減速度−先行車速の自車目標減速度演算式の領域マップを参照し、現在の先行車の減速度と速度が属する領域の自車目標減速度演算式を選択し、この選択した自車目標減速度演算式により自車目標減速度を演算して、自動ブレーキ制御(追従停止制御も含む)や自動加速制御(追従発進制御も含む)等を行う。
(もっと読む)
1 - 20 / 68
[ Back to top ]