
Fターム[3D046HH49]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 路面状態 (350) | 路面傾斜 (136)
Fターム[3D046HH49]に分類される特許
1 - 20 / 136
ブレーキ装置
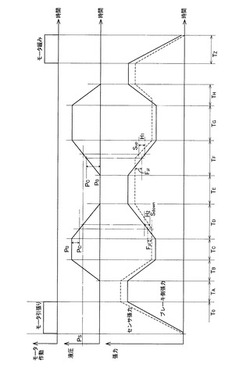
【課題】パーキングブレーキにおけるケーブルの摩擦特性を取得する。
【解決手段】ドラムブレーキが、パーキングブレーキとサービスブレーキとで共通のものとされている。ケーブルが引っ張られてパーキングブレーキが作用状態にある場合において、サービスブレーキのブレーキシリンダの液圧が増加させられると、インナケーブルのブレーキ側張力が減少させられる(期間TF)。インナケーブルのブレーキ側張力は、ブレーキシリンダの液圧の増加に伴って減少させられるが、液圧の増加量とブレーキ側張力の減少量との関係は既知である。また、ケーブルの摩擦により、ブレーキ側張力が変化しても、その変化に遅れて張力センサによる検出値が変化する。以上の事情から、液圧の増加が開始されてから張力センサによる検出値が減少するまでの間の、増圧量(Pc−P0)に基づけば、ケーブルの摩擦力を取得することができる。
(もっと読む)
作業車の走行伝動構造

【課題】作業車の一時停止時の移動を防止できる作業車の走行伝動構造を低コストで実現する。
【解決手段】作業車の走行伝動構造において、エンジン1からの動力を変速装置6及び前後進切替装置33を介して走行装置24,39に伝達するように構成し、変速操作具56が中立位置Nから前進位置Fに操作されると、前後進切換装置33を前進位置に操作し、変速操作具56が中立位置Nから後進位置Rに操作されると、前後進切換装置33を後進位置に操作する第1操作手段と、変速操作具56が中立位置Nに操作されると、変速装置6の伝動比の異なる複数の変速位置を共に伝動状態に操作し、変速装置6の上流側の動力の伝達を遮断する第2操作手段と、を備える。
(もっと読む)
クラッチ操作検出装置及び当該装置を利用した車両質量推定装置
【課題】 簡単かつ安価な構成で、精度良くクラッチの切断操作を検出する。
【解決手段】 S3で、クラッチスイッチ(CSW)8がONか否かを判断する。YESであれば、運転者がクラッチペダルを踏んでいる状態が継続していると判断してS4へ進む。NOの場合にはS11へ進み、CSW8のチャタリング等による誤推定を排除するため、加速度データが1秒分あるか否かを判断する。YESであればS12で車両質量推定を実行し、NOであればS13で質量推定を無効とする。S4では、CSW8のON状態が4秒経過したか否かを判断し、YESであればS5へ進み、NOであればS7へ進む。S5ではエンジン回転数が所定値TNeより低いか否かを判断し、YESであれば変速操作が継続されていると判断しS6へ進む。NOであれば、CSW8がON状態であるにも拘わらずエンジン回転数が所定値TNe以上であるため、足載せ運転状態であると判断しS8へ進む。S6では車両質量推定を実行し、S7では質量推定を無効とする。
(もっと読む)
車両用電動パーキングブレーキ装置及び車両用電動パーキングブレーキ装置の異常検出方法
【課題】ケーブル切れ異常を適切に検出する車両用電動パーキングブレーキ装置及びその異常検出方法を提供すること。
【解決手段】車両に搭載された、電動式のパーキングブレーキ装置が、自車両現在位置の坂路勾配に応じた目標制動力を算出する算出手段と、この目標制動力を生じさせるケーブル張力をパーキングブレーキケーブルに発生させる張力発生手段と、自車両が移動しているか否かを判定する判定手段と、パーキングブレーキケーブルの異常を検出するケーブル異常検出手段とを備える。張力発生手段は、目標制動力を生じさせる第一のケーブル張力を発生させたときに、自車両が移動している場合、上記第一のケーブル張力の2倍の張力である第二のケーブル張力を発生させる。ケーブル異常検出手段は、張力発生手段が上記第二のケーブル張力を発生させたときに、自車両が移動していない場合、パーキングブレーキケーブルに異常が発生していると判断する。
(もっと読む)
車両およびその制御方法
【課題】運転者が車両の起動中にシフト操作を行った場合であっても、車両の起動後に再度のシフト操作をすることなく違和感なく発進できるようにすること。
【解決手段】ハイブリッド自動車20の起動中に運転者によりシフト操作が行われたときは、そのシフトポジションSPをCPU72に記憶する。そして、起動が完了したときに、走行するシフトポジションSPがRAM76に記憶されており、ブレーキポジションBPが0%でなく且つアクセル開度Accが0%であるとはいえないとき、RAM76に記憶されたシフトポジションSPとアクセル開度Accと車速Vとに基づいて設定された要求トルクTr*が出力されるようエンジンECU24やモータECU40に指令を出力すると共に、所定の初期値から時間と共に徐々に小さな値に設定される制動トルクが作用するようにブレーキ96a〜96dを制御するようブレーキECU94に指令を出力する。
(もっと読む)
電動車両
【課題】電動車両の降坂走行時において、降坂走行に引き続く平坦路走行あるいは登坂走行で十分な動力性能が発揮できるように考慮した電動発電機の回生発電制御を行なう。
【解決手段】回生制御部110は、回生制動時のモータジェネレータのトルク指令値Tqcom(一般的には負値)を設定する。制動協調制御部150は、運転者のブレーキ踏力BKに基づき車両全体で必要とされるトータル制動力(パワー)を算出するとともに、このトータル制動力の出力についての油圧ブレーキ90およびモータジェネレータ間での分担を制御する。MG−ECU50は、トルク指令値Tqcomに従った回生トルクが発生されるようにモータジェネレータを駆動制御する。回生制御部110は、同一のブレーキ操作に対して、降坂路走行時には平坦路走行時よりも回生トルクの絶対値が小さくなるように制限する。
(もっと読む)
制動力制御装置、制動力制御方法
【課題】ドラムイン型のパーキングブレーキ装置が制動状態の場合に車両が動いても、ブレーキシューの耐久性が確保される制動力制御装置、制動力制御方法を提供することを目的とする。
【解決手段】ブレーキペダル11の踏み込み操作に応じて制動力が増減するサービスブレーキ30の制動力制御装置10において、サービスブレーキ30の制動力を低減するアクチュエータ15と、パーキングブレーキ20が制動状態の場合、パーキングブレーキ11が制動状態でない場合に制動力が低下する速度よりも遅い制動力低下速度でアクチュエータ15を制御する制御手段21aと、を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】車高の調整時に車両の各部にかかる負担を軽減する。
【解決手段】車高調整手段は、車両のばね上とばね下の間に車輪毎に介装され車体と車輪の間の距離を変えることで車高を調整する。ブレーキ設定部118は、車高調整手段による車高調整の実行中に車輪の回転を許すように制動手段によって発生する制動力を低下させる。ブレーキ設定部118は、傾斜測定部112により測定された路面の傾斜の大きさに応じて異なる制動力を設定する。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】電動パーキングブレーキの構成要素の耐久性を高める必要を廃することができる電動パーキングブレーキ制御装置を提供すること。
【解決手段】本発明による電動パーキングブレーキ制御装置1は、車両のドラムブレーキ7の作動力を制御する作動力制御手段2aと、ドラムブレーキ7の制動力不足を検出する制動力不足検出手段2bと、制動力不足検出手段2bが制動力不足を検出した場合に、制動力不足検出手段2bが制動力不足を検出しなくなるまで作動力を増加させる作動力増加手段2cと、車両の位置を検出する位置検出手段9aと、作動力増加手段2cが作動力を増加させた場合に、作動力の増加分と位置検出手段9aの検出した車両の位置を記憶する記憶手段9bを備えると共に、記憶された車両の位置において再度車両を停止させる場合に、作動力増加手段2cが記憶された作動力の増加分だけ一度に作動力を増加させることを特徴とする。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】ヒルホールド機能を備えるとともに、安全性をより向上した電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、少なくとも車両の速度変化に基づいて路面の傾斜を判定する傾斜判定部41cと、傾斜判定部41cが判定した路面の傾斜に応じて、パーキングブレーキ10の制動力を、平地用制動力よりも大きい傾斜路用制動力に設定するとともに、傾斜路用制動力による制動の解除後であって、所定の車速条件を充足する前に車両が停止した場合は、この車速条件が充足した場合よりも緩和された条件において傾斜路用制動力を設定する制動力設定部41とを備える構成とする。
(もっと読む)
車両用制動制御装置
【課題】停止ショックを低減するために制動力の低減制御を行う車両において、路面に勾配を有する場合でも車両のずり下がりを抑制するとともに停止ショックを低減する車両用制動制御装置を提供することを課題とする。
【解決手段】車両が停止状態に移行するときに制動力の低減制御を行う車両用制動制御装置1であって、制動力を制御する制御手段7と、路面の勾配を取得する路面勾配取得手段2,4,7とを備え、制御手段7は、路面勾配取得手段2,4,7で取得した路面勾配に基づいて制動力の増加率を設定し、車両の停止判定後に当該増加率に応じて制動力を増加させることを特徴とする。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】坂道での停車後、早期に路面傾斜度に応じた電動パーキングブレーキの作動を行うとともに、車両の動き出しを確実に防止できる電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、車両の走行中にその走行状態に基づいて推定される動的推定路面傾斜度と、車両の停車後に車両に作用する加速度に基づいて推定される静的推定路面傾斜度とをそれぞれ求め、車両の停止後、静的推定路面傾斜度が動的推定路面傾斜度よりも大きい場合にパーキングブレーキ10の制動力を動的推定路面傾斜度に基づいて設定される制動力よりも増加させる構成とする。
(もっと読む)
冷却システムおよびそれを備える車両
【課題】インバータの熱的保護を確保しながら車両の登坂性能を向上することができる冷却システムおよびそれを備える車両を提供する。
【解決手段】ブレーキECU140は、車両の状態が予め定められた制御開始条件を満たすとき、ヒルスタートアシスト制御を実行するとともに、車両がヒルホールドの状態であることを指示するフラグFhをオンに設定してHVECU110へ出力する。HVECU110は、温度センサ16からのインバータ温度Tinvが車両駆動用のモータジェネレータMG2の負荷率の制限を開始する制限開始温度以上のとき、あるいは、ブレーキECU140からオン状態に設定されたフラグFhを受けたとき、インバータ装置70を冷却するための冷却水の目標流量を最大流量に設定する。ウォーターポンプ50は目標流量に一致した流量の冷却水を冷媒路54〜58に循環させる。
(もっと読む)
電動パーキングブレーキシステム
【課題】電動パーキングブレーキシステムにおいて、ケーブルの張力を、車両を良好に停止状態に保ち得る大きさに制御可能とする。
【解決手段】停止状態維持制御中において、プログラムが実行される毎に、傾斜角度、シフト位置に基づいて移動力対応目標張力Frefbが取得されて、最大値Fmaxと比較して小さい方が今回の暫定目標張力Fref(n)とされる(S107,108)。前回の制御用目標張力(本目標張力)Fref(n-1)*と今回の暫定目標値Fref(n)とが比較され、大きい方が今回の制御用目標張力Fref(n)*とされる(S110〜112)。今回の暫定目標張力Fref(n)の方が小さくても、今回の制御用目標値Fref(n)*が小さくされることがない。その結果、張力を、車両を良好に停止状態に保ち得る大きさに制御することができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】車両の走行速度の大小にかかわらず、電動パーキングブレーキを所望の作動力で作用させることができる電動パーキングブレーキシステムを提供する。
【解決手段】車両通常使用時にはPKBスイッチのロック位置への操作により電動パーキングブレーキを作用させ、車速vが設定速度α以下であるか否かにより作動力を異ならせ、緊急制御あるいは駐車制御を行う(S15,S16)。ブレーキシューのドラムとの摺合わせ時にはトランスミッションをDレンジとし、左右後輪を車両の駆動装置により回転させ、PKBスイッチの操作により電動パーキングブレーキを摺合わせ用作動力で作用させる(S8)。制動力テスト時にはトランスミッションをNレンジとし、テスト装置により左右後輪を回転させ、PKBスイッチの操作により電動パーキングブレーキをテスト時作動力で作用させ、テスト装置の電動モータが受ける反トルクに基づいて制動力を検出する(S13)。
(もっと読む)
車両のヒルホールド制御装置
【課題】コストの増大や構成の複雑化を生じさせることなく発進時の車両の後退を防止する。
【解決手段】本発明は、エンジン(1)の出力軸の回転速度を変速して駆動輪へと伝達する自動変速機(3)と、自動変速機(3)の変速機構に供給される油圧を発生するオイルポンプ(4)と、車両が停止してから再発進するまでの間、ブレーキペダル(10)の操作にかかわらず車輪に制動力を作用させるヒルホールド制御手段とを備えており、ヒルホールド制御手段は、前述の自動変速機用に設けられるオイルポンプ(4)の発生油圧によって車輪のブレーキ圧をアシストすることで車輪に制動力を作用させる。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】運転者の操縦技術によらず、タイヤの捻れに起因する揺り戻し挙動を低減する。
【解決手段】運転者によってブレーキペダル26に対して踏み込み操作が行われたとき、制動制御部3は、インターフェイス6を介してブレーキペダル26の踏み込み操作の検出信号を取得するとともに、車体速センサ2によって検出された車体速度に関するデータを取得し、車体速度が零になったときに、制動装置20で発生される制動力を一旦解放させる又は緩和させる制御信号を生成して制動制御油圧装置25に供給する。そして、所定期間経過したときに、制動装置20を再度作動させる制御信号を供給する。
(もっと読む)
走行状態推定装置、自動車、及び走行状態推定方法
【課題】横すべり角βを高精度に推定する。
【解決手段】通常、ヨーレートと左右の車輪速差とは、一対一の線形性の関係にあるが、横すべり角が発生すると、この関係にずれが生じる。そこで、車体のヨーレートγと左右の車輪速差(VRW−VLW)とに応じて、車体の横すべり角βを推定する。
(もっと読む)
1 - 20 / 136
[ Back to top ]