
Fターム[3D046JJ24]の内容
ブレーキシステム(制動力調整) (22,399) | 制御方法 (1,512) | テーブル値制御 (157)
Fターム[3D046JJ24]に分類される特許
1 - 20 / 157
液圧ブレーキ装置およびその制御方法
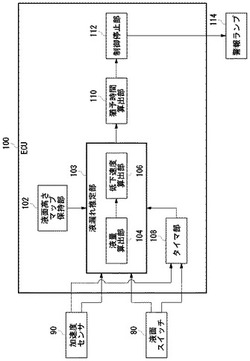
【課題】液圧ブレーキ装置において、液漏れ等の失陥発生時にリザーバタンクからの空気吸い込みを防止しつつブレーキの制御可能時間を延長する。
【解決手段】液面スイッチ80は、リザーバタンクの予め定められた下限液面へのブレーキ液面の低下を検知する。タイマ部108は、リザーバタンク内の液面の傾斜によって液面スイッチがブレーキ液面の低下を検知する第1時刻から、車両が加減速しておらずブレーキ液面が水平であるときに液面スイッチがブレーキ液面の低下を検知する第2時刻までの経過時間を計測する。液漏れ推定部103は、第1時刻の加速度を参照して液面高さマップ保持部102から対応する液面高さを取得し、経過時間と液面高さからブレーキ液面低下速度を算出する。猶予時間算出部110は、ブレーキ液面低下速度に基づいて液圧ブレーキ装置の制御を停止するまでの猶予時間を計算する。
(もっと読む)
産業車両の走行制御装置

【課題】走行状態中に運転者が離席した場合であっても、走行安定性の低下を抑制しつつ、回生制動によって停止距離の低減を図ること。
【解決手段】走行状態中に運転者の離席を検出した場合は回生制動を掛け、その際には車両の状態に応じて回生制動の強さを変更するように制御する。この制御は、回生制動の強さに対し、荷重の条件と、揚高の条件と、ティルト角の条件を予め対応付けておく。具体的に言えば、揚高については低揚高よりも高揚高の方が回生制動の強さを弱くし、ティルト角については後傾側よりも水平・前傾側の方が回生制動の強さを弱くする。これにより、回生制動は、車両の状態に応じた強さで掛けられ、車両の走行安定性の低下が抑制される。また、回生制動により、車両の停止距離の低減が図られる。
(もっと読む)
車両の制動制御装置
【課題】センターデファレンシャルを搭載している車両を含めた直結4輪駆動状態となる駆動状態モードを有する車両について、車両が直結4輪駆動状態となったときでも、車両の挙動を安定させる制動制御を行うことができる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車両の挙動を安定させる制動制御を行う制動制御装置80であって、
前記車両の駆動状態を切り替える駆動状態切替手段60と、
前記車両のスリップ状態を検出するスリップ状態検出手段10と、
前記制動制御の作動許可を判定する制動制御許可判定手段30とを備え、
前記制動制御許可判定手段は、前記駆動状態切替手段により前記車両が直結4輪駆動状態とされたときには、前記スリップ状態検出手段により検出されたスリップ状態が所定のスリップ状態を越えたときに、前記制動制御の作動許可を行うことを特徴とする。
(もっと読む)
車両の制動装置
【課題】制動時における車室内の快適性を向上できる制動装置を提供する。
【解決手段】ブレーキペダルの操作量に応じた制動力を発生するポンプ8を備えた車両の制動装置である。所定条件下、ポンプ8の作動による制動力の変化速度を、車体速度やエンジン回転数に応じて変更し、当該車体速度若しくはエンジン回転数が低い程、当該変化速度を小さく抑える。
(もっと読む)
車両の制動制御装置
【課題】センターデフロック状態又は直結4輪駆動状態であっても、制動制御を行い、運転者の運転を適切に支援できる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車輪への制動力を制御して、車両の旋回中の挙動を安定させる車両の制動制御装置80であって、
前記車両の旋回状態を検出する旋回状態検出手段10と、
該旋回状態検出手段により検出された旋回状態に基づいて、前記車両の各車輪の制動制御量を設定する制動制御量設定手段20と、
該制動制御量設定手段により設定された制動制御量に基づいて、前記各車輪の制動制御を行う制動制御手段50と、
前記車両が走行している路面の路面摩擦係数を推定する路面摩擦係数推定手段30とを備え、
前記制動制御量設定手段は、前記車両がセンターデフロック状態又は直結4輪駆動状態のときには、前記各車輪の制動制御量の上限を、前記路面摩擦係数推定手段により推定された路面摩擦係数に応じて変更することを特徴とする。
(もっと読む)
制動力制御装置
【課題】ブレーキバイワイヤにおいて、ブレーキ戻し操作時における制動変化の違和感発生を抑えることが可能な制動力制御装置を提供する。
【解決手段】
運転者のブレーキペダル1の踏込みストロークに応じたマスタシリンダ圧Pを出力するマスタシリンダと、マスタシリンダ圧P及びブレーキペダルの踏込みストローク量Sに基づいて目標減速度Gを算出し該目標減速度となるようにホイルシリンダの制動力を制御する。上記目標減速度Gを算出する際の上記マスタシリンダ圧Pの寄与度合をマスタシリンダ圧Pが大きいほど大きくなるように設定する。そして、ブレーキペダル1の戻し中における目標減速度Gの一時的な上昇を制限する手段を備える。
(もっと読む)
アンチスキッド制御用モータの制御装置
【課題】ABS制御中においてリザーバがブレーキ液で満たされること、並びに空になることを回避するように、リザーバ内のブレーキ液を汲み上げる液圧ポンプを駆動するモータの回転速度(液圧ポンプの吐出流量)を制御すること。
【解決手段】ABS制御中において、モータの(平均)回転速度は目標回転速度NEtになるように制御される。値NEtの初期値NEini(ABS制御開始時点(時刻t1)での値)は、ABS制御開始時点での車体減速度に基づいて、ABS制御中においてリザーバ液量が「0」より大きく最大リザーバ液量Qfullよりも小さい範囲内で推移するように決定される。値NEtの更新タイミング(時刻t2、t3、t4)が到来する毎にリザーバ液量推定値Qの変化傾向が判定され、増加傾向にある場合(時刻t2、t4)、値NEtがより大きい値に更新され、減少傾向にある場合(時刻t3)、値NEtがより小さい値に更新される。
(もっと読む)
作業車両用制動装置および作業車両
【課題】 作業車両の制動時において、回生制動によるエネルギ回収量の向上を図るとともに、信頼性の低下を防止することができる作業車両を提供する。
【解決手段】 運転者が操作するブレーキ操作部9と、ブレーキ操作部9の操作量を検知する操作量検出部11と、車輪33の回転を電気エネルギに変換することにより、車輪33の回転を制動する回生部35と、操作量検出部11の出力に基づいて回生部35を制御する制御部39と、操作量が所定値より小さいときには操作量の伝達を遮断し、操作量が所定値以上のときには、操作量から所定値を除去した操作量を伝達する伝達部17と、伝達部17から伝達された操作量に基づいて、車輪33の回転を摩擦力により制動する制動部45と、が設けられていることを特徴とする。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
車両およびその制御方法
【課題】車両の安定性が悪化するのを抑制する。
【解決手段】モータMG2のインバータ42のトランジスタのいずれかに異常が生じて閉回路が形成されたときには、ブレーキ64a,64bから前輪63a,63bに制動トルクを出力する。これにより、モータMG2の回転に伴って後輪66a,66bに作用する制動トルクとブレーキ64a,64bから前輪63a,63bに出力する制動トルクとがアンバランスになることによる車両の安定性の悪化を抑制することができる。
(もっと読む)
車両用制動制御装置
【課題】停止ショックを低減するために制動力の低減制御を行う車両において、路面に勾配を有する場合でも車両のずり下がりを抑制するとともに停止ショックを低減する車両用制動制御装置を提供することを課題とする。
【解決手段】車両が停止状態に移行するときに制動力の低減制御を行う車両用制動制御装置1であって、制動力を制御する制御手段7と、路面の勾配を取得する路面勾配取得手段2,4,7とを備え、制御手段7は、路面勾配取得手段2,4,7で取得した路面勾配に基づいて制動力の増加率を設定し、車両の停止判定後に当該増加率に応じて制動力を増加させることを特徴とする。
(もっと読む)
車両の運転制御装置
【課題】車両の電力の低下時に、できるだけ車両の運動制御の作用効果を低減させずに、運動制御に於いて作動する電動式のアクチュエータ又はモータの消費電力を低減する車両の運動制御装置を提供すること。
【解決手段】本発明の運動制御装置は、車両に於いて使用可能な電力が低いとき、アクチュエータの作動を制御する手段が、車両の運動制御のためのアクチュエータの作動を使用可能な電力が高いときに比べて低い供給電力にて且早い時期にて開始する。また、制動制御用アクチュエータとスロットル制御用アクチュエータを含む場合には、車両に於いて使用可能な電力が低いとき、制動制御用アクチュエータの制御量を使用可能な電力が高いときに比べて小さくする。
(もっと読む)
制動力制御装置
【課題】ブレーキバイワイヤにおいて、制動の高G領域からのブレーキ戻し操作時に制動変化にねばり感を演出可能な制動力制御装置を提供する。
【解決手段】目標減速度Gを算出する際の上記マスタシリンダ圧Pと踏込みストローク量Sの寄与度合を、マスタシリンダ圧Pが大きいほどマスタシリンダ圧Pの寄与度合を大きく設定した、制動力制御装置である。その制動制御手段は、踏込みストローク量Sの寄与度合よりもマスタシリンダ圧Pの寄与度合が大きい状態で、ブレーキペダル1の戻し操作がされたと判定したときに、ブレーキペダル1の戻り遅れが発生しているストローク遅れ領域Lでは、上記目標減速度Gの低下を制限する。
(もっと読む)
電動パーキングブレーキシステム
【課題】電動パーキングブレーキ機構の作用中に、制動トルク不足が生じ難くする。
【解決手段】S33において、傾斜角度と、シフト位置とから移動力対応目標張力が決定され、S34において、傾斜角度と、シフト位置とから緩み補填量が取得され、S35において、これらの和である緩み対応目標張力と出力可能な最大値との小さい方が、制御用目標張力とされる。そして、S40〜43において、ケーブルの張力が制御用目標張力(たいての場合は、緩み対応目標張力となる)となるように電動モータが制御される。このように、パーキングブレーキの作動時に、張力がケーブルの緩みを考慮した大きさに制御されるため、その後、パーキングブレーキの作用中に、制動トルク不足が生じ難くすることができ、増し引きが行われ難くすることができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】車両の走行速度の大小にかかわらず、電動パーキングブレーキを所望の作動力で作用させることができる電動パーキングブレーキシステムを提供する。
【解決手段】車両通常使用時にはPKBスイッチのロック位置への操作により電動パーキングブレーキを作用させ、車速vが設定速度α以下であるか否かにより作動力を異ならせ、緊急制御あるいは駐車制御を行う(S15,S16)。ブレーキシューのドラムとの摺合わせ時にはトランスミッションをDレンジとし、左右後輪を車両の駆動装置により回転させ、PKBスイッチの操作により電動パーキングブレーキを摺合わせ用作動力で作用させる(S8)。制動力テスト時にはトランスミッションをNレンジとし、テスト装置により左右後輪を回転させ、PKBスイッチの操作により電動パーキングブレーキをテスト時作動力で作用させ、テスト装置の電動モータが受ける反トルクに基づいて制動力を検出する(S13)。
(もっと読む)
車両の制動制御装置
【課題】 旋回挙動の安定性を確保しつつ、実用燃費の向上を図ることができる車両の制動制御装置を提供する。
【解決手段】 駆動輪に設けられ回生制動力を出力する回生制動手段と、前記駆動輪と従動輪とに設けられ摩擦制動力を出力する摩擦制動手段と、運転者の要求制動力に基づいて、回生制動力と摩擦制動力の配分を制御する制動力配分手段と、前記駆動輪と前記従動輪の車輪速偏差に一次遅れフィルタを作用させた後の車輪速偏差が大きいほど前記回生制動力を制限する回生制動力制限手段と、を備えた。
(もっと読む)
車両の制動制御装置
【課題】 旋回挙動の安定性を確保しつつ、実用燃費の向上を図ることができる車両の制動制御装置を提供する。
【解決手段】 ブレーキコントローラ5は、推定アンダーステア量sestunderが大きいほど小さな1次回生制限値slimregenを設定する1次回生制限値演算部316aと、ドライバ要求制動トルクsbknsと実回生制動トルクERとの偏差が大きいほど、2次回生制限値REG_LIMを大きく設定する2次回生制限値演算部316dと、1次回生制限値slimregenと2次回生制限値REG_LIMのセレクトローにより目標回生制動トルクの上限値である回生量制限値slimregenを選択するセレクトロー演算部316eと、を備える。
(もっと読む)
車両の制御量設定装置
【課題】車両が長期にわたって使用されても、車両の運動制御を好適に実行させることができる車両の制御量設定装置を提供する。
【解決手段】制御量設定装置11を構成するECU16は、車両状態を数値的に表す車両状態値としてヨーレート偏差を検出する。また、ECU16は、車両の走行距離を車両特性値として読み出し、該走行距離が走行距離閾値よりも大きいか否かを判定する。そして、走行距離が走行距離閾値以下である場合、ECU16は、車両特性が未だ変化していないものと判断し、走行距離を加味することなく、ヨーレート偏差のみに基づき制御量を設定する。一方、走行距離が走行距離閾値よりも大きい場合、ECU16は、車両特性が変化してしまったものと判断し、ヨーレート偏差と走行距離とに基づき制御量を設定する。
(もっと読む)
運転支援装置
【課題】人の集まる場所の周辺を車輌が走行する場合に運転支援内容を変更してより積極的な運転支援を行う運転支援装置を提供すること。
【解決手段】運転者による運転操作を支援する運転支援手段8、9、10を備える運転支援装置100は、自車位置を認識する自車位置認識手段11と、人の集まる場所に係る地域情報を取得する地域情報取得手段12と、地域情報取得手段12が取得した地域情報に基づいて自車位置認識手段11により認識した自車位置が注意を必要とする位置であるか否かを判定する注意要否判定手段13と、注意要否判定手段13による判定結果に基づいて運転支援手段8、9、10の運転支援特性を変更する運転支援特性制御手段14と、を備える。
(もっと読む)
制動制御装置およびその方法
【課題】 旋回中等、制動制御が実行されている際にステアバイワイヤ制御系の故障が発生した場合であっても、舵角センサの検出値に基づき演算される目標ヨーレートの値が変化し、車両挙動制御が誤介入して運転者に違和感を与えるおそれを回避した制動制御装置を提供する。
【解決手段】 操舵角に基づき算出されたヨーレートに基づいて各輪の制動力を演算し、演算された前記制動力に基づいて前記各輪の制動力を制御する制動制御装置において、前記操舵角に対する車両応答性の変化を検出した場合、前記ヨーレートの算出モデルを切り替えることとした。
(もっと読む)
1 - 20 / 157
[ Back to top ]