
Fターム[3D052AA05]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 目的、効果 (593) | 旋回操作性の改善 (148)
Fターム[3D052AA05]の下位に属するFターム
Fターム[3D052AA05]に分類される特許
1 - 20 / 95
乗用型作業機
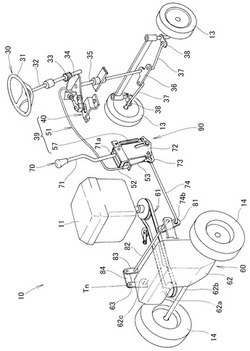
【課題】乗用型作業機の旋回時の走行速度を自動的に減速するための構成を簡略化すること。
【解決手段】ステアリングハンドル31と、エンジン11と、該エンジン11の動力を走行用の駆動輪14,14に伝達する油圧式無段変速機62と、該油圧式無段変速機62を変速操作をするようにスイング動作が可能な操作レバー71と、を備えた乗用型作業機10である。操作レバー71のスイング基部71aには、戻し機構90が設けられている。該戻し機構90は、操作レバー71によって変速操作されている油圧式無段変速機62の変速状態を、ステアリングハンドル31による旋回操舵時に減速する方向に戻す。
(もっと読む)
作業車

【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
移動装置
【課題】搭乗者が左操作または右操作を加えると移動方向を変える移動装置の操作を簡単化したい。搭乗者が右左折を意図して操作したのか、車線変更を意図して操作したのかが判別できないと操作を簡単化できない。
【解決手段】移動装置の位置を特定する位置特定装置と、移動装置が移動可能な経路網に存在する分岐点群の位置情報を示す分岐点群の位置情報DBと、角速度指示値の計算装置を備えている。計算装置は、操作部が左操作された時の移動装置の位置から次の分岐点までの距離が所定値以下であれば当該分岐点で左折する角速度指示値を計算し、操作部が左操作された時の上記距離が所定値以上であれば左側へ車線変更する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以下であれば当該分岐点で右折する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以上であれば右側へ車線変更する角速度指示値を計算する。
(もっと読む)
作業車両
【課題】走行部2の駆動構造を廉価に構成できるものでありながら、左右の走行部2の旋回操作性を向上できるようにした作業車両を提供しようとするものである。
【解決手段】左右走行部2を装設した走行機体1と、走行機体1に搭載する原動機3と、原動機3から左右走行部2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行部2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチ27と左ブレーキ28、または右操向クラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
車両の操舵装置
【課題】操舵のために運転者にかかる負担を軽減することのできる車両の操舵装置を提供する。
【解決手段】この操舵装置1には、右後輪15の回転速度および左後輪16の回転速度を変速比に応じた大きさに変更する無段変速装置50が設けられている。また操作装置60には、この無段変速装置50内のねじ機構を動作させて変速比を変更するドラム61が設けられている。また、右後輪15および左後輪16が直進するときの変速比を直進変速比とし、右後輪15および左後輪16が旋回するときの変速比を旋回変速比とし、変速比が直進変速比のときの無段変速装置50の動作状態を直進動作状態とし、変速比が旋回変速比のときの無段変速装置50の動作状態を旋回動作状態として、無段変速装置50の動作状態を旋回動作状態から直進動作状態に復帰させる復帰装置70が設けられている。
(もっと読む)
移動体駆動装置
【課題】簡易な装置構成で、スムーズな走行を実現することができるようにする。
【解決手段】ホイールベース決定部28によって、操作部16によって入力された操作に対応する操舵角に応じて、駆動輪と仮想操舵輪との間のホイールベースを、操舵角の絶対値が大きいほど短くなるように決定する。回転速度算出部30によって、決定されたホイールベースと、入力された操作に対応する速度及び操舵角とに基づいて、左右各々の駆動輪の回転速度を各々算出する。サーボアンプ19によって、算出された左右各々の駆動輪の回転速度に基づいて、右駆動部20R及び左駆動部20Lによる駆動を制御する。
(もっと読む)
作業車両
【課題】左右一対のクローラ式走行装置に動力を変速伝動する一対の変速装置を作動させる各作動アームの相対的な操作位置調整を容易に行えるようにする。
【解決手段】左右一対の変速装置の作動アーム32A,32Bと走行操作具とを機械的に連結するリンク機構36A,36Bを一対の変速装置毎に各別に設け、各リンク機構36A,36Bが一対の連結ロッド44A,44B,46A,46B及び該一対の連結ロッド44A,44B,46A,46Bを連結する連結リンク47A,47Bを備え、一対の連結ロッド44A,44B,46A,46Bを作動アーム32A,32B側と走行操作具23側とにそれぞれ連結するとともに、該一対の連結ロッド44A,44B,46A,46Bの少なくとも一方を長さ調整可能に構成した作業車両において、前記2つの連結リンク47A,47Bを共通の支点軸49によって支持する。
(もっと読む)
乗用型作業機
【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 機体にエンジンからの動力を各別に入り切りする左右サイドクラッチ(SC)を介して駆動される左右後輪を設け、作業装置を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置(S)を設け、該検出装置(S)は、回転検出用の歯車回転体(K)の回転数を検出する構成とした。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、電動モータ22と、HST35と、2つの後車輪21と、差動装置23と、制御部と、を備える。HST35は、エンジン2の出力を変速する。差動装置23は、HST35の出力と電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度を制御する。また、エンジン2の出力は略一定とされる。そして、制御部は、HST35の駆動力を打ち消す方向にのみ前記電動モータ22を回転駆動する。
(もっと読む)
移動農機
【課題】旋回内側の後輪に対するブレーキ装置の制動力を軽減させながら、機体の小回り旋回を可能にする簡潔且つ安価な構成の簡易的なオートブレーキ装置を提供する。
【解決手段】一対のブレーキペダル14L,14Rの踏み込み量を規制する制動力規制手段28L,28Rを設け、操舵角検出センサ34L,34Rにより一定以上の前輪2の操舵を検出した時、前記制動力規制手段28L,28Rが、旋回内側の後輪3のブレーキ装置17L,17Rを作動させるブレーキペダル14L,14Rの踏み込み量を規制するように構成した。
(もっと読む)
作業車両
【課題】作業効率性と作業の均一化に優れた旋回を行う作業車両を提供する。
【解決手段】直進方向を基準として、前記操向ハンドル7の回動角度を検出する角度検知手段51と、作業速度と旋回速度の制御の開始および/または終了の基準となる前記操向ハンドル7の回動角度の閾値Aを設定する角度閾値設定手段61と、前記回動角度の閾値A以上に前記操向ハンドル7が位置する場合の設定旋回車速Vを設定する旋回車速設定手段62と、前記油圧式無段変速装置23の変速アクチュエータ24と、制御手段81とを備え、前記制御手段81は、前記角度検知手段51による検出値が前記回動角度の閾値A以上になると、前記設定旋回車速Vとなるように前記変速アクチュエータ24を作動させ、前記角度検知手段51による検出値が前記回動角度の閾値A未満の場合、前記作業速度になるよう前記変速アクチュエータ24を制御するように構成した。
(もっと読む)
走行車両
【課題】旋回直後に、次行程の作業位置に合わせるべく操向ハンドルを操作するような時に、旋回後の走行車体の位置合わせを安定して容易に行うことができる乗用型作業機などの走行車両を提供する。
【解決手段】操向ハンドルの操作に連動して操向内側の後輪の駆動を断続的に入り切りする断続的入り切り制御機能B1は、該制御機能B1を作動させた後にハンドルの戻し操作により一度前記制御機能B1が非作動状態となったにもかかわらず、ハンドルの操向操作があるとき、前記制御機能B1における操向内側の後輪の駆動力を入/切する周期の入状態の割合を前回の制御機能B1の作動時の入状態の割合より小さくすることで、走行車体の操向を速やかに行えるため、旋回後の走行車体の位置合わせが安定して容易に行える。
(もっと読む)
コンバイン
【課題】エンジン17の動力を、左右の走行部2に伝達する直進用変速機53及び左右の走行部に逆回転して伝達する旋回用変速機54と、前記直進用変速機の直進手動操作具13と、前記旋回用変速機の旋回用手動操作具10とを備えている走行車両において、その旋回操作機構の簡素化及び旋回操作性能の向上を図る。
【解決手段】直交する2つの軸線P、S回りに回動可能な制御体131を備え、この制御体は、前記旋回用手動操作具の旋回操作に伴う前記第1軸線P回りの正逆回動にて前記旋回用変速機を、旋回連動機構180を介して旋回作動させ、前記直進用手動操作具の変速操作に伴う前記第2軸線S回りの正逆回動にて前記直進用変速機を変速作動させるように構成され、前記旋回連動機構には、前記旋回用変速機を旋回作動する電動モータ193を備えている。
(もっと読む)
コンバイン
【課題】エンジンの動力を、左右の走行部に伝達する直進用変速機及び左右の走行部に逆回転して伝達する旋回用変速機と、前記直進用変速機の直進手動操作具と、前記旋回用変速機の旋回用手動操作具とを備えている走行車両において、その旋回操作機構の簡素化及び旋回操作性能の向上を図る。
【解決手段】直交する2つの軸線P、S回りに回動可能な制御体131を備え、この制御体は、前記旋回用手動操作具の旋回操作に伴う前記第1軸線P回りの正逆回動にて前記旋回用変速機を、旋回連動機構180を介して旋回作動させ、前記直進用手動操作具の変速操作に伴う前記第2軸線S回りの正逆回動にて前記直進用変速機を変速作動させるように構成され、前記旋回連動機構には、前記旋回用変速機を旋回作動する油圧シリンダ193を備えている。
(もっと読む)
作業車輌の前輪操向装置
【課題】配置するスイッチを少ない個数とするものでありながら、操舵方向及び複数段階の操舵角を検出することが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とからなる操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間に、操舵角に応じた複数回の状態変化を出力させることができ、操舵方向及び複数段階の操舵角を検出することができる。
(もっと読む)
車両の操舵装置
【課題】車両の操縦性を高める、左右ハンドルによる操舵・走行制御システムを提供する。
【解決手段】動力式の走行装置20L,20R及び旋回装置31L,31Rを有した車両10の操舵装置である。この操舵装置は、互いに独立した回転が可能に車体に取り付けられた左右の操作ハンドル81L,81Rと、左右の操作ハンドルを互いに同じ回転方向へ回転させたときの、第1の回転角に応じて旋回装置を制御する旋回制御部と、左右の操作ハンドルを互いに逆回転方向へ回転させたときの、第2の回転角に応じて走行装置の前進、後進及び走行速度を制御する走行制御部とを有している。旋回制御部及び走行制御部は制御部63に含まれている。
(もっと読む)
作業機の操向角検出構造
【課題】単一センサで操向角度センサを構成できる良さを生かしながら、操向角度センサの取付位置を合理的に設定して、故障等を未然に回避して信頼性の高い作業機の操向角検出構造を提供する。
【解決手段】前輪の操向角度を検出する操向角度センサ47と繰向部材41とを連係機構Bによって連係する。連係機構Bを、繰向部材41より後方に延出された連係ロッド48と、その連係ロッド48の作動を伝達する上下向き姿勢の回転連係軸49とで構成し、操向角度センサ47を前記回転連係軸49の上端部に連係させてある。
(もっと読む)
1 - 20 / 95
[ Back to top ]