
Fターム[3D052BB03]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 車両状態(条件,作用) (599) | 走行 (101) | 低速 (22)
Fターム[3D052BB03]に分類される特許
1 - 20 / 22
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
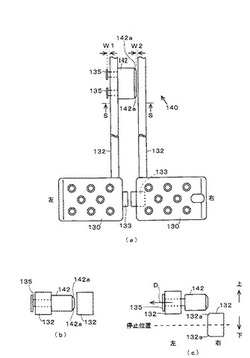
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
作業車

【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】少なくとも2つの操舵可能輪と相互に独立に駆動される少なくとも2つの駆動輪とを有する車両において、狭い駐車スペースへも僅かな操車の手間で駐車を行えるようにする。
【解決手段】縦列駐車の駐車スペース3への入庫過程を容易にするために、車両1は相互に独立に駆動される少なくとも2つの駆動輪11を有する。駆動機構として例えばハブモータ13が用いられる。駆動輪11は、ここでは、対向する2つの車輪すなわち1個の軸の両側の車輪であって、カーブ走行の際に一方が内円を走行し他方が外円を走行する。車両1のカーブ走行および操車走行を容易にするために、車両1はさらに少なくとも2つの操舵可能輪を有している。この実施例では、操舵可能輪は操舵可能軸15に取り付けられた車輪である。操舵可能軸15により操舵可能輪17の方向を相応に変更することにより、車輪を運動させ、操舵過程ないし車両の旋回走行が開始される。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
農作業機の自動操向制御装置
【課題】本発明では、発信機と受信機等の通信機器を設けることなく、圃場に凹凸が有っても自動的に直進走行になるように制御する自動制御の操向制御装置を設けることで、農作業機を運転して農作業を行う作業者の労力を軽減し効率的作業を行えるようにすることが課題である。
【解決手段】走行装置を操向する操向制御装置と機体の進行方向を検出する進行方向検出手段を機体に設け、該進行方向検出手段が直進からずれたことを検出すると操向制御装置を直進に修正すべく制御したことを特徴とする農作業機の自動操向制御装置とした。
(もっと読む)
装軌車両の操向制御装置
【課題】車両走行時の速度段が低速度段の場合にスムーズな旋回性能を得るとともに、コントロール性も向上させる。
【解決手段】トランスミッションが低速度段にあることが検出されたときに、ブレーキ結合時の上限油圧から下限油圧に変化する際のレバーストロークに対する油圧変化率を小さめに設定した油圧特性を得るための操向制御信号を電子比例制御弁に出力する。
(もっと読む)
回転検出装置及び不整地用走行車両
【課題】回転検出装置において、回転ロータの振動や不安定回転といった外乱により、ピックアップセンサがパルス波形を誤検出して、車速を誤認するという問題を解消する。
【解決手段】出力軸と共に回転する回転ロータ92aと、回転ロータ92aの半径方向外側に配置された一対のピックアップセンサ93a1,93a2と、走行コントローラとを備える。両ピックアップセンサ93a1,93a2は、回転ロータ92aの回転に伴い互いに位相の異なるパルス波形を出力するように、位相をずらして配置する。走行コントローラは、両ピックアップセンサ93a1,93a2からの両パルス波形に基づく方向判別結果が3回連続で同じ方向を示した場合に回転ロータ92aの回転方向を決定し、少なくとも一方のパルス波形のうち2回分のエッジ間隔T2−T1,T3−T2から、回転ロータ92aの回転数を演算する。
(もっと読む)
コンバイン
【課題】旋回状態表示用としての特別のモニタ表示器が不要となり、構成の簡素化によって製造コストを低減する。
【解決手段】車台(7)の前部側にハンドル(1)の操作によって油圧式無段変速装置(2)を駆動させて旋回を行わせる差動装置(3)を内装した走行用ミッションケース(4)を設け、グレンタンク(10)に貯留された穀粒量およびエンジン(20)の回転数を基本画面(A)としてモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度を超えるまでハンドル(1)を操作した場合に当該速度差をオペレータに認識させる表示画面(B)をモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度以内に復帰するまでハンドル(1)を操作した場合には、モニタ表示器(6)から前記表示画面(B)の表示を消去して基本画面(A)の表示に戻すコントローラ(83)を設ける。
(もっと読む)
車両駆動用アクチュエータ及び車両
【課題】車輪駆動用の電動モータの動力を利用して簡単な構成及び制御により車高調整を可能とした車両駆動用アクチュエータを提供する。
【解決手段】車両駆動用アクチュエータA1は、モータジェネレータ10と、モータジェネレータ10からの動力を複数に分配可能な遊星歯車減速機構32を有し且つ遊星歯車減速機構32を介してモータジェネレータ10の回転を車軸3に伝達して車輪2を回転駆動する車輪駆動ユニット30とを備えるものであって、車体1と車輪駆動ユニット30との間に設けられる四節リンク機構50を備え、遊星歯車減速機構32を介して分配された動力によって四節リンク機構50を駆動することにより、車体1の車高を調整する。
(もっと読む)
作業車
【課題】 車体に大幅な構造改良を加えることなく簡素な構成で自動操向運転を行えるようにすることが可能であり、且つ、極力迅速に旋回操作を行なえるようにしながらもショックの少ない安定した旋回走行を行うことが可能な作業車を提供する。
【解決手段】 旋回操作レバー18が中立位置から一方向に移動すると右旋回状態に切り換わり且つ移動量が大きくなるほど大きい旋回力となり、中立位置から他方向に移動すると左旋回状態に切り換わり且つ移動量が大きくなるほど大きい旋回力となる操向手段が備えられ、旋回操作レバー18を所定移動経路に沿って移動操作自在な旋回用レバー駆動装置26が備えられ、制御手段が、旋回操作レバー18の操作位置が大側操作域にあるときには小側操作域にあるときよりも旋回操作レバー18を低速で移動させる形態で旋回用レバー駆動装置26の作動を制御する。
(もっと読む)
作業車両
【課題】左右のクローラ式走行装置を駆動する静油圧式無段変速装置と、走行変速レバー及びステアリングハンドルと、これら走行変速レバー及びステアリングハンドルと静油圧式無段変速装置とを連結する機械的連係機構とを備えた作業車両において、走行変速レバーが後進微速操作域のもとでステアリングハンドルを操向操作して機体の幅寄せ等を行なう時、エンジンの回転がアイドリング状態で旋回内側のクローラ式走行装置が減速されて、左右の走行装置に対する全体的な駆動トルクが不足するといった不具合を解消する。
【解決手段】機械的連係機構L1,L2に、走行変速レバー11の後進微速操作域でのみステアリングハンドル12の操向操作に連動して旋回外側の走行用油圧モータを増速せしめる増速系連係機構L3を介設した。
(もっと読む)
乗り物
【課題】 車椅子のように旋回自在で歩道、建物内などの場所で低速走行可能であると同時に、一般道路などもある程度高い速度で走行して長距離運転を可能とする。
【解決手段】 乗り物は、独立に転舵される左右転舵輪WHfl,WHfrと、独立に駆動される左右駆動輪WHrl,WHrrとを備えている。左右駆動輪WHrl,WHrrは、リンク機構により車体BDに連結され、左右転舵輪WHfl,WHfrおよび左右駆動輪WHrl,WHrr間の長い伸長状態と、左右転舵輪WHfl,WHfrおよび左右駆動輪WHrl,WHrr間の短い収縮状態とに切換えられる。伸長状態では、車体BDの路面に対する傾斜角が小さくなり、ジョイスティック13の前後左右の操作により通常車両のように運転が制御される。収縮状態では、車体BDの路面に対する傾斜角が大きくなり、ジョイスティック13の前後左右の操作により小回り低速運転が制御される。
(もっと読む)
コンバイン
【課題】操向操作具の操作性の向上によってコンバインの作業能率を高める。
【解決手段】クローラを駆動するミッションケース32L,32R内に差動機構を設け、該ミッションケース32L,32Rに走行用油圧無段変速機構5と旋回用油圧無段変速機構6を取り付け、該走行用油圧無段変速機構5と旋回用油圧無段変速機構6による差動機構の駆動によって旋回内側の車軸18を正逆に無段変速して駆動する構成とし、前記旋回用油圧無段変速機構6の駆動回転速度を操向操作具の回動操作角度に応じて調節する構成とし、該操向操作具の前後方向の傾斜姿勢を調節可能に構成し、該操向操作具の掴み部に刈取部を昇降操作するスイッチを設ける。
(もっと読む)
作業車両
【課題】左右の走行装置を逆方向に増減速駆動させ、迅速な旋回を可能にするとともに、機体の中心車速が速すぎる場合は、機体の中心車速を減速調整し、任意の速度で旋回できるようにする。
【解決手段】左右の走行装置5を同方向に増減速駆動する走行変速装置14と、左右の走行装置5を逆方向に増減速駆動する操向変速装置15とを備える走行機体1であって、走行変速装置14を作動させる主変速レバー43と、操向変速装置15を作動させるステアリングホイール7と、主変速レバー43に優先して走行変速装置14を減速作動させるペダル44とを備える。
(もっと読む)
作業車
【課題】 作業走行を終えて次の作業箇所に旋回走行して移動するとともに次の作業箇所に自走車体を位置合わせするに当たり、迅速に移動することができ、かつ、精度よく容易に位置合わせすることができる作業車を提供する。
【解決手段】 主変速装置17に連係された制御手段21に、走行速度検出手段22を連係させるとともに旋回角度計測手段30を備えてある。旋回角度計測手段30による計測旋回角度が設定旋回角度になると、制御手段21は、自走車体が低速設定手段24による設定低速度で走行するように、主変速装置17を減速操作する。
(もっと読む)
走行型車両
【課題】旋回用に、出力の小さい小型の電動モータを搭載することができ、省エネを図りつつ作業効率を向上させることができる走行型車両を提供する。
【解決手段】作業者が旋回レバーを最大限に操作した場合、即ち旋回レバーの最大操作量が入力された場合、非除雪作業中は車速が早いため緩旋回モードに切り換えて、旋回外側の車軸に対し内側の車軸が同一回転方向で回転数が低くなるよう旋回用電動モータを制御する(緩やかな旋回)。一方、除雪作業中は車速が遅いため急旋回モードに切り換えて、旋回外側の車軸に対し内側の車軸が回転停止するか逆回転するよう旋回用電動モータを制御する(急速な旋回)。
(もっと読む)
走行型車両
【課題】HSTと小出力の安価な小型電動モータとを用いて効率良く変速することができ、作業効率を向上させることができる走行型車両を提供する。
【解決手段】除雪作業中は、変速レバーが低速域に入力された場合、HST(静油圧式無段変速装置)の一定出力と電動モータの変速レバーの操作量(変速レバー角度)に応じた出力との差動出力を走行装置に伝達して変速するモータ変速モードに切り換える。一方、変速レバーが高速域に入力された場合、HSTの変速レバーの変速レバー角度に応じた出力と電動モータの一定出力(“0”)との差動出力を走行装置に伝達して変速するHST変速モードに切り換える。
(もっと読む)
乗用型農作業機
【課題】 乗用型農作業機において、運転者が走行機体の前方の地上に立ちながら行う走行機体の操作の操作性を向上させる。
【解決手段】 走行機体の前部に操向操作具を備え、操向操作具により走行機体の前方の地上から前輪の操向操作が可能な第1状態と、操向操作具により走行機体の前方の地上から前輪の操向操作が不能な第2状態とを設定する。操向操作具を前方に倒伏操作可能に構成し、操向操作具の倒伏角度によって第1及び第2状態が選択されるように構成する。
(もっと読む)
走行クローラの制御機構
【課題】運転操作性の向上並びに変速部材(25)及び操向部材(28)などの制御構造の簡略化などを図る。
【解決手段】左右走行クローラ(2)を同一方向に同一速度で駆動する変速部材(25)と、左右走行クローラ(2)の操向部材(28)を設けるクローラ走行車において、左右走行クローラ(2)速度を検出する車速センサ(118)(119)と、操向ハンドル(19)操作量を検出する操向角度センサ(113)と、変速レバー(73)操作位置を検出する変速センサ(111)を設け、操向ハンドル(19)操作量によって決定される旋回半径になるように左右走行クローラ(2)速度を自動制御するように構成したことを特徴とする。
(もっと読む)
1 - 20 / 22
[ Back to top ]