
Fターム[3D053MM43]の内容
車外に取付けた後視鏡装置 (4,760) | 制御(検出) (497) | 関連制御 (228) | ハンドル(操舵角) (17)
Fターム[3D053MM43]に分類される特許
1 - 17 / 17
運転支援装置
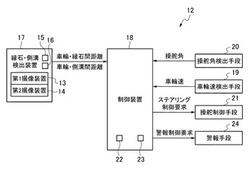
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
サイドミラー制御装置

【課題】狭い路地を右左折する場合に、運転者がミラーの角度を調整する必要がなく、運転者のわずらわしい操作を軽減する。
【解決手段】車両左右側部に設けられたミラー2,3の角度を変えるミラー駆動手段5,6と、ミラー駆動手段5,6を制御する制御手段7とを備えたサイドミラー制御装置において、車両左右前後端から所定範囲内に位置する物体を検出する障害物検出手段19と、ステアリングホイールの操舵方向を検出する操舵方向検出手段20とを備え、制御手段は、障害物検出手段19により車両左前端または車両左後端から所定範囲内に位置する物体が検出され、かつ、操舵方向検出手段20により右方向への操舵が検出された時には、ミラー駆動手段5により右ミラー2の角度を運転席から車両下部右側面を視認することができる角度に変えることを特徴とする。
(もっと読む)
車両の制御システム
【課題】車両の制御システムを提供する。
【解決手段】運転手の仮想アバタを生成するための命令を入力する入力部、入力手段に入力された命令によって実際運転手の外部映像を感知する映像感知部、映像感知手段で感知された実際運転手の映像を仮想アバタに変換させるアバタ生成部、および仮想アバタの形状に応じて、運転手シート、操向装置、サイドミラー、またはルームミラーを制御する統合制御部を含む。したがって、アイフォンやMOZENなどのような入力部によってアバタ生成のための命令を入力し、バックカメラのような映像感知部によって新たな運転手の映像を感知し、このように感知された運転手の映像を利用して3D仮想アバタを生成し、この仮想アバタを実際車両と対応する座標に適用することにより、シート、操向装置、サイドミラー、およびルームミラーなどを自動的に再設定できる特徴を有する。
(もっと読む)
ミラー制御装置、ミラー制御方法、及びプログラム
【課題】移動体の乗員に対して移動体周囲の視界を適切に提供するためのミラーの向きの新たな制御手法を提供する。
【解決手段】位置検出部11は、複数の対象物の各々についての移動体に対する位置関係を検出する。挙動検出部12は、これらの対象物の各々についての挙動を検出する。指標取得部13は、これらの対象物の各々について、位置検出部11が検出した当該対象物についての前述の位置関係と、挙動検出部12が検出した当該対象物の挙動とに基づき、当該対象物の移動体への接触の可能性の高さの程度を数値の大きさで表す指標を得る。制御部14は、これらの対象物のうちで、移動体に設置されているミラーでの反射によって提供される当該移動体の周囲の視野の範囲内に位置しているものの各々について指標取得部13が取得した前述の指標の総和に基づいて、当該ミラーの向きを制御する。
(もっと読む)
車両用ドアミラーの角度制御装置及び角度制御方法
【課題】車両の斜め後方の死角に伴う事故を減らし運転がし易くなるドアミラーの角度制御装置及び角度制御方法を提供する。
【解決手段】一定の速度から一定時間内に一定の加速度以上で車両が加速しているのを検知する加速度検知手段11と、一定時間以内に車両のステアリングの操舵角が一定範囲内であるのを検知する操舵角範囲検知手段12と、一定時間内に車両の右折用のウインカーが作動したのを検知するウインカー作動検知手段13とを備え、これらの検知手段により一定の速度から一定時間内に一定の加速度以上で加速し、一定時間以内に車両のステアリングの操舵角が一定範囲内であり、一定時間内に車両の右折用のウインカーが作動したことを検知した場合、車両の右側のドアミラー51,61の角度を所定の角度から一定時間一定角度だけ外側に開くように制御する。
(もっと読む)
視野推定装置、視野推定方法、コンピュータプログラム及び記録媒体
【課題】視認されるべき視野を総合的に評価して安全運転に役立てることが可能な視野推定装置、視野推定方法、並びに前記視野推定装置を実現するためのコンピュータプログラム及び該コンピュータプログラムを記録した記録媒体を提供する。
【解決手段】乗員の頭部位置から車両1のバックミラー11、ドアミラー12,13及び前方窓を介して乗員の視線方向に夫々視認されるべき視野が空間的に分布する範囲を算出し、算出した夫々の範囲に時間を遡ると共に指数関数的に減少する重みを付与して時系列的に積算する。各ミラーについて鏡面の方向、頭部位置及び夫々のミラーの位置に基づいて夫々のミラーに対する頭部位置の虚像位置にある仮想視点を算出し、各ミラーの鏡面の方向及び視線方向に基づいて仮想視点から夫々のミラーを見通す方向となる仮想視線方向を算出し、仮想視点から仮想視線方向に夫々のミラーの鏡面を見通す範囲内で視認されるべき視野を算出する。
(もっと読む)
サイドミラー
【課題】 車両の斜め後方の視認が可能な状態を維持しつつ、運転状況により必要な方向を同時に確認することができるサイドミラーの提供。
【解決手段】 車両の斜め後方を視認するための反射面30を有するサイドミラー1において、サイドミラー1の車両幅方向に反射面30を分割して、分割した内側の反射面30bの反射方向を駆動で変更自在にし、外側の反射面30aの可視範囲より前方で側方側を反射させるようにした。
(もっと読む)
車両用制御装置
【課題】装置全体の構成を徒に複雑にせず、出力デバイスの仕様変更や制御装置の追加による装置全体への影響を低減することが可能な車両用制御装置を提供すること。
【解決手段】出力デバイスを制御するための複数の制御手段を有する車両用制御装置であって、前記複数の制御手段のうち相互依存性を有する制御手段群のみが、該制御手段群に含まれる各制御手段間の制御量を調整する調整用制御手段を有することを特徴とする、車両用制御装置。
(もっと読む)
車両のミラー駆動制御装置
【課題】降車時のドア開放時の視界を確保することができる車両のミラー制御装置を提供する。
【解決手段】サイドミラー位置記憶装置2は、予め、ドアの開放軌跡及びその軌跡上にある障害物を視認しやすいミラー方向、すなわち降車確認方向を記憶する。サイドミラー制御装置3は、降車動作検出部1からの各種検知信号、スイッチオンオフ信号に従って、乗員が降車しようとする動作、あるいは及びその予備動作があったか否かを判別し、乗員が降車しようとすると、サイドミラー位置記憶装置2に記憶されている降車確認方向にサイドミラーの鏡面を動かすべく、サイドミラー駆動装置4を駆動制御する。
(もっと読む)
駐車支援装置
【課題】より適切に運転者の駐車操作を支援することができる駐車支援装置を提供すること。
【解決手段】本発明による駐車支援装置1は、目標駐車位置と自車両が所定の相対位置関係にある一旦停止位置において当該目標駐車位置を認識する認識手段2aと、目標駐車位置に基づいて駐車運転時の操舵操作を支援する支援手段2bと、一旦停止位置に自車両を運転者が停止させるにあたって、目標駐車位置の特徴箇所と前記自車両との相対位置関係を三次元的に当該運転者が視認することを補助するための駐車補助手段8とを備えることを特徴とする。
(もっと読む)
視界補助手段制御装置
【課題】視界補助手段による視認性の向上を図った視界補助手段制御装置を提供すること。
【解決手段】車両制御手段4によって選択された走行モードに応じて、運転者の視界を補助する視界補助手段の位置を制御する位置制御手段6を備える構成とする。これにより、選択された走行モードに応じて、視界補助手段の位置を制御することができるため、旋回半径の異なる複数の走行モードに応じて、視界補助手段の位置を変更することにより、視界補助手段による視認性を向上させることができる。
(もっと読む)
死角を排除する目的で搭載される自動車のバックミラーシフトシステム
【課題】ドライバー想定位置(23)でバックミラー(14)の死角を無くす。
【解決手段】外部の両サイドバックミラーと自動車内部に配置された中央バックミラーから構成され、制御システムは自動車内に配置され、外部の両サイドバックミラーの転回は、車体面に垂直なz軸を中心に両方向にミラーを転回させることによって達成され、中央バックミラーは、z軸上を中心にして、両方向に転回し、かつ、その置かれている面に沿って制御される。さらにこのアクティブバックミラーシステムは、シフトおよび転回のために使用されるモータの制御に関するデータを備える制御システムを備え、それにより、各バックミラーは、二つの連続した角度の間で、所定の運動速度で、前もって決定した運動を実行し、バックミラーの最終位置は、ステアリングホイールの回転角度のパラメータ、方向指示器の状態ならびにドライバーによって決定される。
(もっと読む)
車両用ミラー制御装置
【課題】車速が遅いときに車線変更しようとする場合でも、車線変更しようとする車線が見やすくなるようにルームミラーやサイドミラーの向きを変化させることができるミラー制御装置を提供すること。
【解決手段】方向指示器を動作させる方向指示レバーが車線変更操作されたことを判定して(S20が肯定判定)、それに基づいて、車線変更がしやすくなるように、サイドミラーの角度を所定角度外側へ駆動させる(S50)。方向指示レバーの操作によって車線変更を判定しているので、車速が遅いときに車線変更しようとする場合でも、車線変更しようとする車線が見やすくなるようにサイドミラーの向きを変化させることができる。
(もっと読む)
車両の自動駐車装置
【課題】 車両の自動駐車装置において、車両を簡易に正しい初期位置に停車させ、車両の駐車位置精度を向上すること。
【解決手段】 車両1の自動駐車装置において、車両1を駐車スペース101の入口線101A、及び該入口線101Aに直交する仕切線101Bを基準として所定の初期位置Aに停車させるための入口目標線42A及び仕切目標線42Bを有する目印手段42を、車体の側部に付帯させたミラー41に設けたもの。
(もっと読む)
車両周辺表示装置
【課題】 走行シーンに応じてドライバの所望する視界が得られる車両周辺表示装置を提供する。
【解決手段】 車両周囲の複数監視エリアの状況を切り替えて表示可能な表示手段(左右サイドミラー1,2、カメラ8,モニタ9)と、操舵角が所定値αを超えたとき、表示手段の表示監視エリアを切り替える処理装置3と、を有する車両周辺表示装置において、操舵角速度を検出する操舵角速度検出手段と、操舵切り増しと切り戻しを判定する操舵判定手段と、を備え、処理装置3は、車速が所定値以下、かつ操舵角速度が所定値以下のとき、切り戻し時の画像表示切り替えしきい値である所定値βを、切り増し時の画像表示切り替えしきい値である所定値αよりも小さな値に設定する。
(もっと読む)
リモコン式サイドミラーの制御装置
【課題】 駐車するとき、一般的にステアリングを切った状態からバックを開始することが多いので、ステアリングを切っているときはサイドミラーを下向きにせず、ステアリングを真っ直ぐにしたときのみサイドミラーを下向きにすることができ、また、前向きで駐車した後のバックの際はサイドミラーを下向きにしないようにしたリモコン式サイドミラーの制御装置を提供する。
【解決手段】 CPU部11は、ギアポジションがドライブ位置からリバース位置に入れられた場合、ステアリングを切っていないときはサイドミラー20が下向きになるように制御し、ステアリングを切っているときはサイドミラー20を通常の向きのままにする。また、CPU部11は、ギアポジションがパーキング位置からリバース位置に入れられた場合は、サイドミラー20を通常の向きのままにする。
(もっと読む)
後輪操舵装置
【課題】 後輪操舵制御中の車庫入れや障害物回避等において、運転者の操舵負荷を軽減できる後輪操舵装置を提供する。
【解決手段】 走行状態に応じて後輪操舵を行う4WSコントロールユニット5を備えた後輪操舵装置において、運転者に車体の左右後方をそれぞれ表示する左右サイドミラー13a,13bと、4WSモード時、ステアリング操舵角に応じて左右サイドミラー13a,13bの表示位置を下方側へ変更する表示位置変更手段と、を備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]