
Fターム[3D054EE24]の内容
Fターム[3D054EE24]の下位に属するFターム
Fターム[3D054EE24]に分類される特許
21 - 28 / 28
車両用シートベルト装置

【課題】 シートベルトによって乗員が局部的に大きな拘束力を受けるのを防止しつつ、必要に応じて乗員を適正に拘束できるようにする。
【解決手段】 乗員を保護する車両のシートベルト6,7にバッグ部6a,7aが設けられた車両用シートベルト装置において、車両の走行モードを検出する走行モード検出手段25と、上記シートベルト6,7に設けられたバッグ部6a,7aにエアを繰り返し供給可能に構成された送風手段3と、この送風手段3と上記バッグ部6a,7aとを接続するエア供給通路12,15と、バッグ部6a,7aに供給されたエアを排出するエア排出手段と、上記走行モード検出手段25により車両が特定の走行モードにあることが検出された場合に、上記送風手段3からエア供給通路12,15を介してバッグ部6a,7aにエアを供給してバッグ部6a,7aを展開させるように制御するエア供給制御手段4とを設けた。
(もっと読む)
車両用シートベルト装置

【課題】 シートベルトによって乗員が局部的に大きな拘束力を受けるのを防止しつつ、衝突の予知段階で乗員を適度に拘束して保護できるようにする。
【解決手段】 車両の衝突を予知する衝突予知手段25と、車両が衝突状態となったことを検出する衝突検出手段26と、シートベルトのバッグ部6a,7aにエアを繰り返する送風手段3と、エア供給通路12,15と、上記バッグ部6a,7aに供給されたエアを排出するエア排出手段と、乗員を拘束するプリテンショナーと、車両の衝突が検出された時点でシートベルトにより乗員を拘束する乗員拘束手段と、上記衝突予知手段により車両の衝突が予知された場合に、上記送風手段3からエア供給通路を介してシートベルトのバッグ部内6a,7aにエアを供給することによりバッグ部6a,7aを展開させるとともに、上記プリテンショナーを作動させてシートベルトを巻き取るように構成した。
(もっと読む)
角速度センサ及び運送機器
角速度検知素子2及び第1及び第2の信号処理部21,22の各出力は、その個数に応じた入力端子数を有するスイッチ回路7の各入力端子に供給され、スイッチ回路7の出力端子は、出力端子4に接続される。スイッチ回路7は、モード信号発生回路8から出力されるモード信号に応じて接続状態を切り替え、角速度検知素子2及び第1及び第2の信号処理部21,22の各出力のいずれかを選択して出力端子4へ供給する。 (もっと読む)
車両における乗員保護手段の制御方法及び乗員保護システム
本発明は車両における乗員保護システム、及び乗員保護手段(2)の制御方法に関する。前記システムによれば、障害物への距離が検出され、衝突を避けるために必要なブレーキ減速度が決定され、該決定されたブレーキ減速度に基づき、所定の事象が発生しているかどうかが定められ、もし前記事象が発生している場合は、乗員保護手段(2)がそれ自体を始動させるため、又はそれ自体が始動されるべく動作するために制御される。車両のドライバがブレーキ操作を開始するためにブレーキ操作要素を操作した場合にのみ、必要なブレーキ減速度が決定され、又は決定された必要なブレーキ減速度が所定の事象の発生に関して評価される。 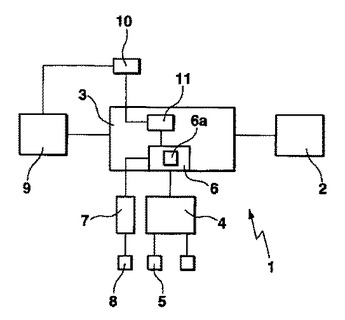 (もっと読む)
(もっと読む)
自動車用の乗員保護システム
本発明は、座面部分と背もたれとの側部領域にエアバッグ(3)が組み込まれた車両シート(2)を有する自動車用の乗員保護システムに関する。このエアバッグの空気圧は圧縮空気調節装置(4)によって設定することができる。本発明によれば、運転操作に対する安全性に関連するデータを評価する制御ユニットが設けられ、予期される事故が起こる前に車両シートの少なくとも1つのエアバッグを膨張させるように、圧縮空気調節装置が時間的に制御される。  (もっと読む)
(もっと読む)
傾斜傾向検出装置
この発明は、車両の縦軸の周りでの傾斜傾向及び垂直軸の周りでの回転傾向を検出するための装置に関し、その際この装置は、検出システムを有する。この検出システムは、横加速度信号を生成する横加速度センサーと、回転角速度信号を生成するヨーレイトセンサーと、操舵角信号を生成する操舵角センサーと、車輪の回転運動信号を生成する車輪回転数センサーと、ハンドル角、ハンドル角速度及び車両速度に対応して、車両の縦軸の周りの傾斜傾向を求めるとともに、横加速度センサー、ヨーレイトセンサー、操舵角センサー及び車輪回転数センサーに対応して、車両の垂直軸の周りの回転傾向を求めるコントローラとを有し、このコントローラは、これらの傾向の特性にもとづき、少なくとも一つの乗客保護手段のための作動信号を生成することを特徴とする。  (もっと読む)
(もっと読む)
乗員検出システム
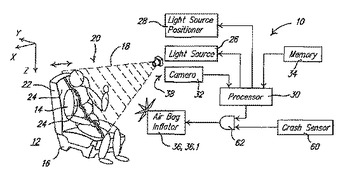
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
プリセーフシステムを装備した自動車
本発明は、自動車の少なくとも1つの周囲認識装置(4)及び運転状況データ検出装置(5)によって受信された情報に従って作動されるアクティブ及び/又はパッシブセーフティ装置(13、14)を備え、前記情報はデータ評価装置(10)によって分析される、プリセーフシステム(2)を装備した自動車(1)に関する。アクティブ及び/又はパッシブセーフティ装置(13、14)の少なくとも1つの要素は、自動車の周囲認識装置(4)の情報が潜在的な衝突物を示すと、及び運転状況データ入力装置(5)が衝突が妥当であると判断すると作動される。  (もっと読む)
(もっと読む)
21 - 28 / 28
[ Back to top ]