
Fターム[3D232CC12]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 操舵応答性、旋回性 (405)
Fターム[3D232CC12]の下位に属するFターム
小回り性の向上 (56)
Fターム[3D232CC12]に分類される特許
1 - 20 / 349
操向制御システム及びその方法
電動パワーステアリング制御装置
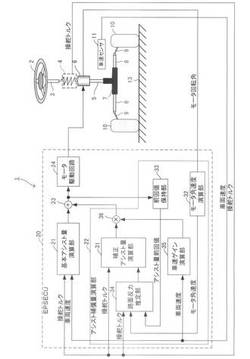
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
操舵装置

【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
舵角比可変操舵装置
【課題】応答性が良くて剛性感のある良好な操舵フィーリングを得ることができる舵角比可変操舵装置を提供する。
【解決手段】舵角比可変機構15は、操舵部材とトーションバーを介して連結された入力軸と、転舵機構に連結された出力軸を接続する。操舵部材の操作に基づく第1舵角にVGRモータ21の駆動に基づく第2舵角θtmを上乗せすることにより、舵角比を可変する。VGR制御部16が、操舵角θs や車速Vに基づいて演算された基礎成分θtmk * に、ねじれ角センサにより検出された、トーションバーのねじれ角δに基づいて演算された補償成分θtmh * を重畳することにより、第2舵角の制御目標値δtm* を演算する。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】 電流センサ31が故障した場合でも、操舵アシストの追従性の低下を抑制して、良好な操舵アシストを継続させる。
【解決手段】 異常時制御量演算部80においては、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算する。また、回転角速度推定部82が操舵トルクセンサ21に設けられた回転角度センサ21bの回転角度θoutを微分してモータ回転角速度ωを推定し、補正電圧演算部83がモータ回転角速度ωに比例した補正電圧V1を計算する。電圧値加算部84は、基本電圧V0に補正電圧V1を加算して電圧指令値V*を計算する。
(もっと読む)
電動パワーステアリング装置
【課題】遅れなく振動を抑制することができ、操舵フィーリングの優れた電動パワーステアリング装置を提供する。
【解決手段】ECU23は、モータ制御信号を出力するマイコン41と、そのモータ制御信号に基づいてモータ21に駆動電力を供給する駆動回路42とを備えた。マイコン41は、電流偏差ΔIにF/BゲインKを乗ずることにより電圧指令値V*を演算するF/B制御部57と、電圧指令値V*に基づいてモータ制御信号を生成するPWM変換部58とを有するモータ制御信号出力部44を備えた。そして、モータ制御信号出力部44に、車両が直進状態である場合にF/BゲインKの値を低応答値に変更するF/Bゲイン演算部61を設けた。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
PWM制御方法
【課題】作動状態は勿論、停止状態から低速で動きだす場合においても、滑らかな制御ができるPWM制御の制御方法を提供することである。
【解決手段】被駆動体と、当該被駆動体を駆動するモータと、前記モータをPWM制御するモータ制御手段と、を備え、前記PWM制御の1周期の中に、前記被駆動体の共振周波数に対応した周波数のパルス群からなる第1デューティと、前記第1デューティのパルス群の周波数よりも高い周波数のパルス群からなる第2デューティと、を有する。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
摩擦円半径導出装置
【課題】走行路の路面勾配が変化しても、正確な摩擦円半径を得ることができる摩擦円半径導出装置を提供する。
【解決手段】軌跡生成演算部は、まず地図データから、車両が走行しようとする走行路の路面勾配の情報を取得し、路面勾配を考慮しない走行軌跡を生成する。そして、軌跡生成演算部は、路面勾配及び車速等の情報に基づいて、路面に対する車輪の接地荷重を算出し、その接地荷重に基づいて、車両の実走行時における車輪の摩擦円半径(タイヤ発生能力)を求め、その摩擦円半径に基づいて、路面勾配を考慮した走行軌跡を生成する。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
産業車両のステアリング装置
【課題】演算処理の負担を軽減し、ハンドル操作に対するタイヤ操舵の追従性を向上させ、路面状況にも合わせて操舵処理を行う。
【解決手段】ハンドル1の回転速度がハンドル不感帯外にある場合は、ハンドル制御に移行して、ハンドル1の回転速度に応じたDUTYをステアリングモータ3に出力し、タイヤ7を旋回駆動する。一方、ハンドル1の回転速度がハンドル不感帯内にある場合は、タイヤ角保持制御に移行して、ハンドル1の回転速度が不感帯内に入った時のタイヤ角をタイヤ角指令値θrefとして保存し、タイヤ角検出値θdetがタイヤ角不感帯内にある場合は、前記ステアリングモータ3を停止して、その時点でのタイヤ角を維持し、タイヤ角検出値θdetがタイヤ角不感帯外にある場合は、タイヤ角がタイヤ角不感帯内に収まるように、ステアリングモータ3を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】 衝突回避時等における操舵性や安定性の向上等を実現した電動パワーステアリング装置を提供する。
【解決手段】 ステップS6で衝突回避支援装置25から緊急時フラグFemgが入力しているか否か(Femg=1であるか否か)を判定し、この判定がNoであればステップS7で通常時操舵角速度差DTωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定し、YesであればステップS8で緊急時操舵角速度差DMωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定する。
(もっと読む)
1 - 20 / 349
[ Back to top ]