
Fターム[3D232DC07]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 論理演算(AND、OR) (59)
Fターム[3D232DC07]に分類される特許
1 - 20 / 59
車線維持支援装置
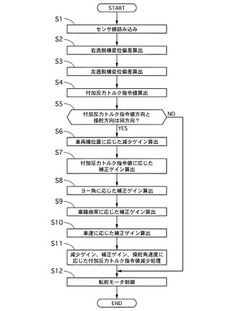
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
電動パワーステアリング装置

【課題】エンジンの始動がなくても好適に起動できる電動パワーステアリング装置を提供することを課題とする。
【解決手段】ステアリング機構に操舵補助力を与える電動機4と、電動機4を駆動する電動機駆動回路23と、電動機駆動回路23を制御する操舵制御ECU130と、を備える電動パワーステアリング装置とする。そして、操舵制御ECU130は、CAN130aを介して取得する完爆情報ES、走行用モータ可動情報MS、車速情報VS、および車速演算値情報TRSに基づいて電動機駆動回路23を始動させ、CAN130aに異常が発生しているときには、CAN130aと異なる信号線を介して入力されるトルク信号TS、角度信号θSに基づいて電動機駆動回路23を始動させることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドル切り込み状態時における、快適な操舵フィーリングを得ることのできる電動パワーステアリング装置を提供することにある。
【解決手段】操舵トルクが所定値以上であり、かつ操舵トルクの微分値が0より大きい場合か、又は、操舵トルクが所定値以下であり、かつ操舵トルクの微分値が0より小さい場合には、切り込み状態と判定し、切り込み状態と判定した条件以外の場合には、切り戻し状態と判定する。そして、切り込み状態と判定した場合のみ、ダンパー補償制御、及び慣性補償制御を有効となるようにする。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために作動する制御対象の制御量を演算し、演算した制御量に基づいて制御対象を制御する。また、車両のドライバの操舵操作量に基づいて制御対象の制御を停止するか否かを判断する。制御対象の制御を停止すると判断したときに、そのときから制御対象の制御量が縮退するように縮退制御量を決定する。制御対象の制御を停止すると判断したときに、決定した縮退制御量に基づいて制御対象の制御量を制御する。
(もっと読む)
車載電子制御装置
【課題】車載機器の各制御を行う車載電子制御装置に関し、検出した2ビットエラーの回数に応じたエラー処理を行うことができる車載電子制御装置を提供すること。
【解決手段】車載電子制御装置3は、メモリ装置から制御データを読込むデータ読込み処理を実行する際に2ビットエラーを検出する異常検出手段と、2ビットエラーを検出した場合、データ読込み処理に対する割込み処理を実行する割込み手段と、割込み処理をカウントする第1カウント手段とを備える。そのため、割込み処理が発生した回数をカウントするため、2ビットエラーの発生回数に応じた処理を実行することができる。よって、2ビットエラーが生じている制御データを用いて車載機器の制御を実行することを防止することができる。
(もっと読む)
車両用制御装置
【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
電動パワーステアリング装置
【解決手段】操舵トルク信号と車速信号とを、それぞれアナログ値からPWM変換して2つのPWM信号を生成し、両PWM信号を合成し、この合成されたPWM信号に基づいて、電動モータを駆動する。PWM変換は、同一の三角波発生回路55によって発生される同期された三角波を用いて行う。
【効果】PWM変換回路51,53などのアナログ回路を採用することにより、演算誤差の少ない電動パワーステアリング装置を実現することができる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。補正制御部38は、推定誘起電圧の二乗和Σに基づき、加算角ガード41による加算角補正の実施/非実施を決定し、加算角リミッタ24における制限値を変更する。
(もっと読む)
アンダーステア検出装置及び検出方法
【課題】横Gセンサを用いず、低コストでアンダーステアの検出精度が向上できると共に、アンダーステアの誤検出を確実に防止できるアンダーステア検出装置及び検出方法を提供する。
【解決手段】ヨーレートと規範ヨーレートの値に応じてアンダーステア検出の禁止及びアンダーステア検出禁止の解除を実行するアンダーステア検出禁止判定手段15を備え、アンダーステア検出禁止判定手段は、以下の条件1、条件2のいずれかが成立時にアンダーステア検出の禁止を行い、
条件1:ヨーレートの絶対値が規範ヨーレートの絶対値よりも大きく、かつヨーレートと規範ヨーレートが同符号の場合
条件2:ヨーレートと規範ヨーレートが異符号の場合
ヨーレートの絶対値と規範ヨーレートの絶対値との差分値が予め定めた閾値以下の状態で所定時間継続した場合にアンダーステア検出の禁止解除を行う。
(もっと読む)
電動パワーステアリング装置
【課題】保舵時のハンドルの振動や騒音を低減できるとともに通常操舵時の操舵性能も確保できるようにした操舵フィーリングの良い電動パワーステアリング装置を提供する。
【解決手段】モータ108と、車速及びトルクに基いて電流指令値を決定する電流指令値決定手段Bと、モータ電流を検出する電流検出手段202と、電圧指令値を出力する電流制御手段Aとを備える電動パワーステアリング装置であって、ハンドルの操舵状態を検出し、保舵状態と検出された時に保舵信号を電流制御手段Aに出力し、通常操舵状態と検出された時に保舵信号を出力しないようにする操舵状態検出手段30を更に備え、電流制御手段Aでは、電流指令値とモータ電流との偏差を入力とし、操舵状態検出手段30で検出された操舵状態に応じて電流制御応答性を切り替え、切り替え後の電流制御応答性と前記偏差とに基づいて電圧指令値を決定する。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、各マイコン18u,18v,18wが、それぞれ独立に、その対応相について相電流フィードバック制御を実行することにより、非結線モータであるモータ12の各相に対し、それぞれ独立に正弦波通電を行なう。また、これら各マイコン18u,18v,18wは、その対応相以外の二相について、それぞれ相電流指令値と実際の電流値との偏差を監視し、その偏差が所定の閾値を超える場合には、当該相に異常が生じたものと判定する。そして、ECU11は、各マイコン18u,18v,18wのうちの二つが、共に、残る一相に異常が発生したものと判定した場合には、当該相が異常である旨の判定を確定する。
(もっと読む)
電動パワーステアリング制御装置
【課題】スイッチング素子のオン故障時においても、継続して安定したステアリング操作を行なうことができる電動パワーステアリング制御装置を提供すること。
【解決手段】正回路または逆回路が制御状態であって、その回路に含まれる2個のスイッチング素子のうち、1個のスイッチング素子がオン故障と判断された場合には、
直流モータの回転指令方向が同一方向である期間は、オン故障したスイッチング素子をオン制御し、もう一方のスイッチング素子はPWM制御を行い、残りの回路に含まれる2個のスイッチング素子はオフ制御とする制御処理を選択し実行する。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
電動パワーステアリング装置
【課題】操舵状態の遷移過程における優れた操舵フィーリングを実現することのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクシフト制御量演算部31は、基礎補償成分としての基礎シフト量εts_bに対し、遷移係数Kssを乗ずることにより操舵トルクシフト制御量εtsを演算する。そして、この操舵トルクシフト制御量εtsには、急変防止処理部32において、ローパスフィルタ処理が施される。また、操舵トルクシフト制御量演算部31内にも、急変防止処理部40が設けられ、遷移係数Kssには、当該急変防止処理部40によるローパスフィルタ処理が施される。そして、この急変防止処理部40を構成するローパスフィルタのカットオフ周波数は、上記操舵トルクシフト制御量εtsに対応した急変防止処理部32を構成するローパスフィルタのカットオフ周波数よりも低く設定される。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両用舵角制御装置及び車両用舵角制御方法
【課題】前輪転舵アクチュエータ5の異常が解消してから通常の4輪操舵制御に復帰する時間を短縮する。
【解決手段】前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出していない場合には、後輪の転舵角を中立位置の角度に制御すると共に前輪転舵アクチュエータ5の駆動を禁止し、前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出している場合には、上記前輪転舵アクチュエータ5及び後輪転舵アクチュエータ9の駆動を禁止する。更に、上記後輪転舵アクチュエータ9の異常を検出した後に、当該後輪転舵アクチュエータ9の異常が検出されなくなると、上記後輪の転舵角を中立位置の角度に制御する。
(もっと読む)
1 - 20 / 59
[ Back to top ]