
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
441 - 448 / 448
電動パワーステアリング装置

【課題】発熱体の温度センサが故障しても、発熱体を過熱から保護しつつアシスト力を十分に供給できる電動パワーステアリング装置を提供する。
【解決手段】
発熱体の温度を推定する温度推定演算手段と、温度センサが故障したことを検出する温度センサ故障検出手段とを備え、温度センサが故障した場合、検出温度に代えて前記推定温度に基いて前記モータ電流を制限する。
(もっと読む)
電動パワーステアリング装置

【課題】 操舵部材の切り始めや切り返し時、操舵補助制御が立ち上がるまでの時間差をできるだけ短くして、操舵フィーリングを良好にする。
【解決手段】 操舵部材1に加えられる操舵トルクに応じて電動モータ5を駆動して操舵補助する電動パワーステアリング装置であって、操舵部材1の操作方向およびその方向への操作開始を検出する操舵開始検出手段(微分回路18)と、操舵操作の開始時、操舵操作の方向と逆方向に電動モータ5を駆動する逆駆動制御手段(EPS用ECU10のマイクロコンピュータ13)とを備えており、操舵操作の開始時、電動モータ5の逆駆動により、トルクセンサ3等で検出される操舵トルクの値を急激に変化させる。
(もっと読む)
電動パワーステアリング装置
【課題】ロックエンド付近等で必要とされる操舵補助トルクを低い値に抑えて、電動モータの小型化、低出力化を可能にする。
【解決手段】 操舵部材1の操作に応じて電動モータ5を駆動して操舵補助する電動パワーステアリング装置であって、操向用車輪12の操舵角を検出する手段16と、各車輪に対して車体の高さを調整する車高調整手段(アクティブサスペンション13)とを備え、操向用車輪12の操舵角が所定の範囲に含まれる場合には、車高調整制御手段(マイクロコンピュータ14)により、車高調整手段13の一部もしくは全部を駆動して車高を調整する制御を行う。
(もっと読む)
産業車両のステアリング装置
【課題】 操舵輪の旋回の限界位置での衝撃を効果的に緩和することができ、しかも、操舵角を検出するセンサの調整にかかる手間を省くことのできるステアリング装置を提供する。
【解決手段】 操舵輪を旋回駆動する駆動装置を制御する制御装置が、操舵輪の最大操舵角L,Rを設定する最大操舵角設定手段と、最大操舵角L,Rから操舵角が絶対値として小さくなる方向へ所定の角度Bの範囲内に現在の操舵角Aがあるか否かを判定する操舵角判定手段と、操舵輪の操舵される方向が操舵角が絶対値として小さくなる方向か、大きくなる方向かを判定する操舵方向判定手段と、駆動装置を制御する駆動制御手段とを備える。そして、駆動制御手段は、現在の操舵角Aが上記角度範囲内にあると判定され、且つ、操舵される方向が操舵角が絶対値として大きくなる方向であると判定されたときに、操舵輪の旋回する速度が抑制されるよう駆動装置を制御する。
(もっと読む)
電動パワーステアリング制御装置およびそれにおける駆動電流オフセットの調整方法
【課題】 より高い精度の駆動電流オフセット値を入力し、この高い精度の駆動電流オフセット値を用いて駆動電流のオフセット補正を行なうことのできる電動パワーステアリング制御装置、およびその駆動電流オフセットの調整方法を提案する。
【解決手段】 制御装置CNT内に組み込まれた電動機駆動電流検出手段とは別に、それよりも高い精度の電動機駆動電流測定手段を用意し、この電動機駆動電流測定手段により、高い精度の駆動電流オフセット値を出力する。制御装置内のオフセット補正手段またはオフセット信号発生手段には、駆動電流測定手段からの高い精度の駆動電流オフセット値を受ける入力手段を設ける。
(もっと読む)
車輪の個々のブレーキング制御装置の支援による、4輪操舵装置を有する自動車の制御方法
本発明は、4輪操舵装置を有する自動車の制御方法に関する。本発明の自動車の制御方法においては、自動車の軌跡が所定の閾値を越えて逸脱したことが検出されたときには、前輪に対する第1のブレーキングトルク(Cmodel)の発生が指令され、自動車の軌跡が所定の閾値を越えて逸脱したことと、後輪の操向装置が故障していることとが検出されたときには、前輪に対する、第1のブレーキングトルク(Cmodel)とは異なる、第2のブレーキングトルク(Cesp)の発生が指令される。 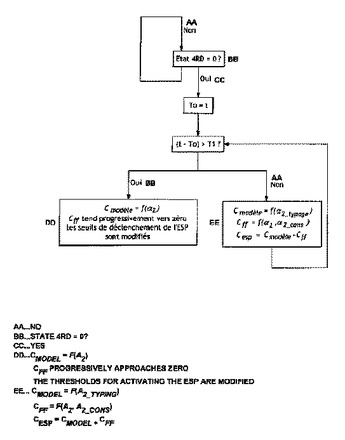 (もっと読む)
(もっと読む)
電気モータを有するパワーステアリングシステム、および、それを装備された車
本発明は、車の電力システムから独立して電力を電気モータに供給するように設計されたパワーステアリングシステムに関する。電気モータ(EM)は電子制御ユニット(ECU)により制御され、ステアリングシステムの歯付ロッドに作用して補助力を付与する。電子制御ユニット(ECU)は、車の電力システムにも供給される第1電力(V1)を供給される。電気エンジン(EM)は、車の電力システムに接続されていない発電機(G)によって発電される、好ましくはより高い第2電圧(V2)を供給される。前記発電機(G)は、パワーステアリングシステムの電気モータ(EM)だけでなく、任意的に、シャーシに設けられたアクティブロールスタビライザーのような他の電気モータにも給電することが好ましい。本発明によれば、ステアリングおよび任意的に他の駆動モータを駆動するモータは、車の電力システムから独立して機能する発電機(G)によって給電される。発電機(G)の出力は、電子制御装置によって、最適な方法にて、電気モータが必要とする出力に調整される。  (もっと読む)
(もっと読む)
チルト調節装置及び車両のチルトを調節する方法
本発明は、車両(10)のロール角速度を示す信号(κ’)を検出すると共に、設定舵取り角信号(δLset)を検出する検出手段と、前記ロール角速度信号(κ’)及び設定舵取り角信号(δLset)に基づいて舵取り信号(δL)を発生する調節手段(21,29,30)とを備え、加えて、車両(10)の少なくとも一つの軸の一つ以上の車輪(11)の舵取りを行うために、舵取りアクチュエータ(15)に舵取り信号(δL)を出力する出力手段(31)を備える車両(10)用のチルト調節装置(16)に関する。本発明によれば、チルト調節装置(16)は、車両(10)が少なくとも一時的にシングルトラック走行モードに保持されるように、舵取り信号(δL)によって舵取りアクチュエータ(15)を制御する。 (もっと読む)
441 - 448 / 448
[ Back to top ]