
Fターム[3D233CA12]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070)
Fターム[3D233CA12]の下位に属するFターム
車両の速度 (3,122)
車両の加速度、横加速度 (573)
Fターム[3D233CA12]に分類される特許
361 - 375 / 375
電動パワーステアリング装置

【課題】制動制御装置による車両安定制御と相俟ってスピン等の車両挙動の不安定化の確実な防止を可能とする車両安定化機能を有する電動パワーステアリング装置を提供する。
【解決手段】ステップ駆動電流設定部150は、制動制御装置2が車両の不安定挙動を検知して作動すると、その作動信号Sとステップ駆動マップ152に基づいて、車輪の操舵によって車両挙動を安定化するのに適切なステップ駆動パターンを選択して、そのステップ駆動パターンに対応するステップ駆動電流値Istを出力する。このステップ駆動電流値Istがアシスト電流値Iaに加算されることにより、モータ駆動のための電流目標値Itが決定される。この電流目標値Itに基づくモータの駆動によりステップ応答的に1回だけ車輪が操舵され、これによって、制動制御装置のみでは安定化できない場合や、安定化できる場合であっても、より迅速に車両の安定化を図ることができる。
(もっと読む)
パワーステアリング装置

【課題】 横断勾配のある道路で車両を直進させる際の操舵負担を軽減可能なパワーステアリング装置を提供する。
【解決手段】 パワーステアリング装置は、補助操舵トルクを発生するモータを備えるとともに、運転者の操舵トルクに応じてモータを制御するための制御量Icを設定する制御量設定部8と、車両が走行中の道路の横断勾配を検出する横断勾配検出部1と、検出された横断勾配に応じてモータを制御するための補正制御量Isを設定する補正制御量設定部4と、制御量Icとゲイン補正された補正制御量Is’とを加算する加算器7と、その加算値によりモータを駆動制御する制御部9とにより構成される。
(もっと読む)
ステアリング装置を備える車両
【課題】ステアリング軸を分割して構成する簡単な構造で、かつ低コストで操向輪を左右に旋回することが可能である。
【解決手段】操向ハンドルと、この操向ハンドルの操作により操向輪を左右に旋回するステアリング軸とを有するステアリング装置を備える車両であり、ステアリング軸を上下に分割し、分割した上側分割ステアリング軸の旋回に基づき車両直進位置から右方向または左方向へのハンドル切り角を検出するハンドル切り角検出手段と、検出したハンドル切り角情報に基づき前記分割した下側分割ステアリング軸を旋回するステアリング軸駆動手段と、上側分割ステアリング軸の旋回力に対して反力を与え、旋回力の解除で初期位置へ戻る反力機構とを備える。
(もっと読む)
車両姿勢制御装置
【課題】 操舵フィーリングや走行フィーリングの悪化を伴うことなく、アンダステアやオーバステアを効果的に抑制した車両姿勢制御装置を提供する。
【解決手段】 姿勢制御装置9は、運転情報(車速や操舵角等)に基づいて規範ヨーレートγmodを算出する規範ヨーレート算出部91と、規範ヨーレートγmodをヨーレートセンサ8が検出した実ヨーレートγrealで減じてヨーレート偏差dγを生成する減算器92と、挙動情報(横G等)に基づいて挙動判定を行ってオーバステア信号Sosやアンダステア信号Susを生成する挙動判定部93と、ヨーレート偏差dγを微分してヨーレート偏差の変化率Δdγを生成する微分器94と、ヨーレート偏差dγとヨーレート偏差の変化率Δdγとに基づいて制御係数Ks,Kbを生成する制御係数設定部95とから構成されている。
(もっと読む)
反力制御装置
【課題】 旋回保舵時および切り返し時に良好な操舵フィーリングを得ることができる反力制御装置を提供する。
【解決手段】 車両の運転者により操作されるステアリングホイールに作用させるべき反力成分を制御する反力制御装置において、前記車両の操舵速度を検出する操舵速度センサ15と、操舵速度センサ15により検出された操舵速度が大きいほど前記反力成分が大きくなるように補正する二次反力補正部35と、を備える。
(もっと読む)
車両の操舵装置
【課題】 車速に適した操舵特性に変更可能であり、かつ、人間の知覚特性に合わせて車両の操舵を可能とする車両の操舵装置を提供すること。
【解決手段】 ステアリングバイワイヤ方式の操舵装置において、変位−トルク変換部51は操舵角θを操舵トルクTdに変換する。このとき、車速Vが大きければ操舵角θに対する操舵トルクTdを大きく変換し、車速Vが小さければ操舵角θに対する操舵トルクTdを小さく変換する。トルク−横加速度変換部52は同変換された操舵トルクTdを指数関係にあり人間が知覚し得る見込み横加速度Gdに変換する。転舵角変換部53は見込み横加速度Gdで車両が運動するために必要な目標転舵角δdを計算する。転舵制御部60は転舵輪を目標転舵角δdに転舵制御する。これにより、車速Vに応じて操舵特性を最適に変更することができ、かつ、人間の知覚特性に合わせて車両を旋回させることができる。
(もっと読む)
反力制御装置
【課題】 ブレーキ圧制御装置が作動していないときの操舵フィーリングを良好にしつつ、ブレーキ圧制御装置の作動が終了したときに生じ得る車両の不整挙動を抑制する。
【解決手段】 車両の運転者により操作されるステアリングホイールに作用させるべき反力成分を制御する反力制御装置において、ステアリングホイールに作用する操舵トルクを検出する操舵トルクセンサ16と、車両の車速を検出する車速センサ19と、少なくとも操舵トルクセンサ16,車速センサ19,及び転舵輪に加えるブレーキ圧を制御可能なブレーキ圧制御装置からの信号に応じて、反力成分を設定する反力補正部33とを備え、この反力補正部33は、ブレーキ圧制御装置が作動しているときは、非作動時よりも反力成分を大きくする。
(もっと読む)
反力制御装置
【課題】 車両挙動の変化率に応じて設定される2次反力成分を、車両挙動の大きさに応じて可変にすることで、良好な操舵フィーリングが得られるようにする。
【解決手段】 車両の運転者により操作されるステアリングホイールに作用させるべき反力成分を制御する反力制御装置において、車両のヨーレートを検出するヨーレートセンサ18と、ヨーレートセンサ18の検出値が大きいほど1次反力成分を大きく設定する1次反力成分制御手段(ヨーレート補正電流算出部)36と、ヨーレートセンサ18の検出値の変化率が大きいほど2次反力成分を大きく設定し且つヨーレートセンサ18の検出値が大きいほど前記2次反力成分を大きく設定する2次反力成分制御手段37と、を備える。前記反力成分は、前記1次反力成分と前記2次反力成分を含む。
(もっと読む)
車両の操舵装置
【課題】 十分信頼性のある故障検知を行うことができる車両の操舵装置を提供する。
【解決手段】 運転者が操作を行う操作子11と、操作子11とは機械的に分離されており、車両のタイヤ12の角度を変更する転舵機構19と、操作子11の操作に応じて、転舵機構19の制御を行う制御装置16と、操作子11の操作量を検知する操作量検知手段14と、タイヤ12の角度を検知するタイヤ角検知手段18と、操作量とタイヤ角に基づいて故障を判定する故障判定手段25を備えた。
(もっと読む)
車両用走行区分線認識装置
【課題】撮影画像を合成するとき、合成された画像から遠方の走行区分線に対応する点列が欠落することがなく、よって走行区分線を精度良く正確に認識できるようにした車両用走行区分線認識装置を提供する。
【解決手段】車両の進行方向の路面を含む領域を撮影するカメラなどの撮影手段と、撮影された撮影画像中の路面上の少なくとも白線などの破線状の走行区分線を認識可能な区分線認識手段と、異なる時刻に撮影された複数の撮影画像を合成して撮影画像中の走行区分線の長さを延長する画像合成手段(S10からS16)とを備える車両用走行区分線認識装置において、画像合成手段は、区分線認識手段による走行区分線の認識処理における撮影画像中の少なくとも走行区分線の形状に変化を与えない処理段階、具体的にはエッジ検出前の段階で(S12)で撮影画像を合成する。
(もっと読む)
スリップ判定装置、スリップ判定方法ならびにそれを用いた車両運動制御装置
【課題】すべりが生じているか否かを車輪単位で精度よく判定する。
【解決手段】検出部31は、車輪5に作用する作用力を直接的に検出する。判定部32は、検出部31によって検出される作用力を経時的にモニタリングし、作用力の推移に基づいて、車輪5にすべりが生じているか否かを判定する。
(もっと読む)
可変伝達比ユニット、これを利用したギア比可変パワーステアリング装置及び、ギア比可変パワーステアリング装置の制御方法
【課題】小型、低コストの可変伝達比ユニット、この可変伝達比ユニットを備えたギア比可変パワーステアリング装置及び、小型、低コストの可変伝達比ユニットを採用するために有効なギア比可変パワーステアリング装置の制御方法を提供すること。
【解決手段】ギア比可変パワーステアリング装置は、第1のステアリングシャフト321と第2のステアリングシャフト322との間の回転伝達比を可変にする可変伝達比ユニット7を備えたものである。可変伝達比ユニット7は、第1のステアリングシャフト321と一体回転する第1のサーキュラスプライン791a及び第2のステアリングシャフト322と一体回転する第2のサーキュラスプライン791bを含む減速機79を有している。第1のサーキュラスプライン791aと第2のサーキュラスプライン791bとの間には、その相対回転を許容又は規制可能なように構成されたロック機構8を介設してある。
(もっと読む)
車両用操舵システム
【課題】路面状態に基づき操舵比を変更する。
【解決手段】自動車用操舵システム10が、操舵角20を規定する操舵輪、操舵角20を制御するパワー・アクチュエーター14及び、ドライバー入力制御角度を提供するステアリング・ホイール16、を有する。ドライバー入力制御角度の操舵角20に対する比が、操舵比を規定する。操舵システム10はまた、路面状態に少なくとも部分的に基づき、操舵比を選択的に変更する制御器18を含む。
(もっと読む)
電気式操舵システムにおけるタイヤ横力の決定方法
電気機械式又は電気油圧式操舵システムを備えた自動車における横力の計算方法を提案する。この方法は、以下の工程を有する。先ずは、ステアリングロッド力を検出し、それから、復元トルク全体を計算する。復元トルク全体は、車輪に作用する様々な力によって引き起こされる復元トルクを含む。これらの復元トルクには、横力によって引き起こされる復元トルクとその他の復元トルクが有る。その他の復元トルクは、測定値にもとづき量的に検出して、復元トルク全体から引き算し、横力によって引き起こされる復元トルクを決定する。最後に、横力によって引き起こされる復元トルクから、横力を算出する。  (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。 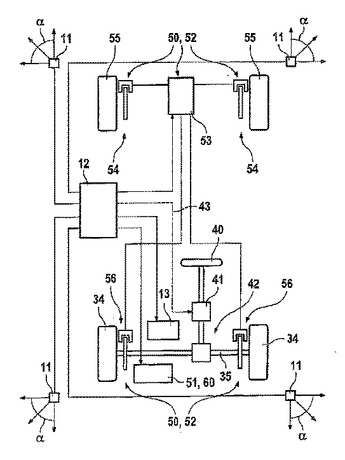 (もっと読む)
(もっと読む)
361 - 375 / 375
[ Back to top ]