
Fターム[3D233CA14]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070) | 車両の加速度、横加速度 (573)
Fターム[3D233CA14]に分類される特許
1 - 20 / 573
車両のパワーステアリング制御装置
ラック軸力推定方法及び電動パワーステアリング装置
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
パワーステアリング装置

【課題】転舵輪と駆動輪とが同一か否かにかかわらず、車輪を駆動するモータの駆動力を用いてステアリングホイールの操舵をアシストする。
【解決手段】パワーステアリング装置20において、左モータ40左輪を駆動する。右モータ42は、右輪を駆動する。左転舵クラッチ52は、左モータ40と操舵軸32との間に介在する。右転舵クラッチ62は、右モータ42と操舵軸32との間に介在する。ECU80は、車速が所定速度以下のときに、右旋回方向にステアリングホイール30が操舵されたときは右転舵クラッチ62をオンにして右モータ42と操舵軸32とを接続させ、左旋回方向にステアリングホイール30が操舵されたときは左転舵クラッチ52をオンにして左モータ40と操舵軸32とを接続させる。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
車両用操舵装置
【課題】多回転操作される操舵部材の回転角を規制可能な小型の車両用操舵装置を提供。
【解決手段】回転規制機構21は、操舵軸9の出力軸24と同軸的に一体回転可能な回転可能要素(ロータコア63の第2部分66)と、回転不能要素(ハウジングの端壁32)との間に、出力軸24によって同軸的に支持され出力軸24に対して回転可能で且つ軸方向X1に移動可能な複数の板要素71〜75を備える。隣接する要素間の相対回転量を突起81と係合溝82,83の両端の規制部とによって規制する。出力軸24の中心軸線L1に対する板要素71〜75の中心軸線の傾きを抑制するように、板要素71〜75の軸方向X1の移動量を所定量以下に規制する軸方向移動規制要素701を設けた。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横G及びヨーレートから演算される軸力に基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横G及びヨーレートから演算される軸力に基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
ステアリング制御装置
【課題】車両の挙動に応じた的確な操舵反力トルクを付与するとともに、運転者が中立位置を超える急速なステアリング操作を行った場合であっても、ステアリングの操作性を良好に維持することが可能なステアリング制御装置を提供する。
【解決手段】コントローラ13のCPU15は、記憶部14から最新の操舵角と第1操舵反力トルクと第2操舵反力トルクとを読み出し、操舵角の符号と第1操舵反力トルクとの符号とが異なり、第1操舵反力トルクの絶対値が第2操舵反力トルクの絶対値よりも小さい場合には、モータ7に第1操舵反力トルクを発生させ、操舵角の符号と第1操舵反力トルクとの符号とが異なり、第1操舵反力の絶対値が第2操舵反力の絶対値以上の場合には、モータ7に第2操舵反力トルクを発生させ、操舵角の符号と第1操舵反力トルクの符号とが同じ場合には、モータ7にトルクを発生させない。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
ヨーレート推定装置及びそれを用いた車両姿勢制御装置
【課題】ヨーレートセンサに頼らずにヨーレートを推定し、ヨーレートセンサが故障したときでも、車両姿勢制御を継続可能にする。
【解決手段】電動モータ20に流れる電流を検出し、検出された値に基づき、軸力Fを推定する。予め設定され記憶された軸力及び横加速度の関係に、前記推定された軸力を適用して、横加速度Gを推定し、このに推定された横加速度Gを用いて、車両のヨーレートを推定する。
(もっと読む)
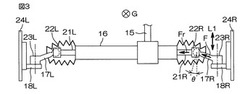
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
1 - 20 / 573
[ Back to top ]