
Fターム[3D244AA19]の内容
Fターム[3D244AA19]に分類される特許
1 - 14 / 14
クルーズコントロールシステム
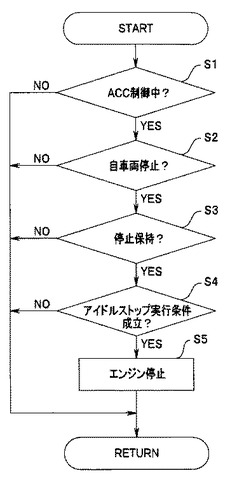
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両用走行制御装置

【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両の制御装置
【課題】目標車速への追従性を犠牲にすることなく減速時の車速のアンダーシュートを抑制し、走行フィーリングの悪化を防止する。
【解決手段】減速燃料カットによって実車速が低下し、実車速と目標車速との偏差が車速差ΔVになったとき、目標車速を初期値として疑似目標車速を設定する。そして、演算周期毎に、実車速を上回らない範囲で疑似目標車速を増加させていく。このとき、疑似目標車速の増加に伴って、要求加速度が極小値から減速燃料カットからの復帰に必要な加速度に向かって増加していく。減速燃料カットからの復帰後は、疑似目標車速を徐々に目標車速に近づけていき、要求加速度を等速運動に必要な加速度(加速度=0)に向かって増加させる。これにより、目標車速への追従性を犠牲にすることなくアンダーシュートを抑制しつつ実車速を目標車速に一致させることができる。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】周囲環境に対する迷惑を抑制しつつ燃費を向上することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置1は、自車両10の周囲環境を検出するためのミリ波レーダ2,3と、ミリ波レーダ2,3で検出された周辺環境に応じて自車両10の走行を制御するECU4とを備えている。この車両用走行制御装置1では、ミリ波レーダ3で後続車両が検出されない場合には、速度範囲E内でエンジン11駆動による加速走行及びエンジン11停止による減速走行が繰り返されるような燃費走行で自車両10が走行され、燃費向上が実現される。一方、ミリ波レーダ3で後続車両が検出された場合には、加減速走行が行われない通常走行で自車両10が走行され、後続車両に対する迷惑が抑制される。
(もっと読む)
省燃費運転システム
【課題】制御開始から下り坂開始点を過ぎるまでの目標速度を線形で徐々に減速させ、燃料カットと噴射を繰り返すことなく、省燃費で且つ円滑な運転フィーリングが得られる省燃費運転システムの提供。
【解決手段】車両の位置を特定する車両位置特定装置(2)と、車両進行方向に存在する下り坂のデータを記憶する記憶装置(11)と、車両(1)の速度(車速V)を計測する車速計測装置(3)と、制御装置(10)とを有し、該制御装置(10)は、車両の速度(V)と、下り坂のデータとから車両(1)の目標速度(要求車速Vd)を決定(演算)する機能を有する。
(もっと読む)
車両用制御装置
【課題】内燃機関の暖機が完了している場合には燃料消費の抑制を優先し、暖機が完了していない場合には暖機を促進して、目標車速に従って車両を走行させることが可能な車両用制御技術を提供する。
【解決手段】ハイブリッド車両1のHVECU100は、予め設定された車速域内に、目標車速が設定された場合に、当該目標車速に従ってハイブリッド車両1を走行させる機能を備える。内燃機関10の暖機が完了している場合には、前記車速域内において、内燃機関10を原動機として作動させた加速走行と、内燃機関10の作動を停止させた惰性走行とを交互に行って目標車速に従って走行する加速惰性走行を行わせ、内燃機関10の暖機が完了していない場合には、内燃機関10を原動機として継続して作動させて目標車速に従って走行する定速走行を行わせる。
(もっと読む)
車両用燃料供給制限装置
【課題】クルーズコントロール中における燃料供給制限を拡大する。
【解決手段】車両用燃料供給制限装置1は、自車両の走行速度と目標速度との偏差に基づいて要求スロットル開度を算出するCCコントロール部21と、CCコントロール部21により算出された要求スロットル開度に基づいてスロットルを駆動するスロットルアクチュエータ15と、要求スロットル開度が燃料カット閾値以下の場合にエンジンに対しフューエルカットを行うとともに、フューエルカット時に要求スロットル開度が燃料カット閾値よりも大きい燃料カットのオフ閾値以上となった場合にエンジンへの燃料供給を再開する燃料供給制御部23と、燃料カットのオフ閾値よりも小さな値となるスロットル開度上限値を設定するスロットル開度制限手段とを備え、要求スロットル開度が燃料カット閾値以下でフューエルカットが行われた場合には、要求スロットル開度をスロットル開度上限値以下に制限する。
(もっと読む)
エンジンの制御装置
【課題】クルーズコントロール中の制御ハンチングを防止しつつ、適切なタイミングで燃料カット制御を行うことができるエンジンの制御装置を提供する。
【解決手段】E/G_ECU15は、クルーズコントロール時にエンジンがアイドル状態となったことを判定したとき、非クルーズコントロール時よりも相対的に長いディレイ時間を用いたディレイ制御を経て燃料カット制御へと移行する。これにより、短い周期で燃料カット制御と燃料リカバーが繰り返されることによる制御ハンチングを的確に防止することができる。この場合において、E/G_ECU15は、クルーズコントロール時に予め設定された自車両1の運転状態に基づいて減速の必要性を認識したとき、ディレイ制御をキャンセルして燃料カット制御へと移行する。これにより、適切なタイミングで燃料カット制御を行うことができる。
(もっと読む)
エンジンの定速運転を変速制御可能な装置と結合する動力システム
【課題】エンジンの定速運転を変速制御可能な装置と結合する動力システムを提供する。
【解決手段】エンジン100が静止状態から起動、及び低速から加速して駆動する過程に、エンジン100を制御して、定速又は定速に近い速度で正味燃料消費率がより高い回転速度区域に運転させることができる。又、エンジンの出力端より、能動的に有段又は無段変速を制御可能な前側変速装置102を駆動することで、出力端から起動、及び低速から加速して駆動する過程及び運転を駆動する場合、エンジンが正味燃料消費率の比較的高い回転速度区域に運転することで、燃料を節約することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の乗員が走行挙動に違和感を与えることを防止しつつ燃費効率を向上させるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド・マネジメントECU36は、車速VPをセット車速VCに追従させるクルーズコントロールの制御時のパラレル運転モードの状態で、パワープラント要求トルクの加算側の更新を規制し、ロックアップ上限トルクに係る所定トルク値に保持するようにし、車速VPが、セット車速VCから車速偏差の上限値ΔVSを減算して得た値未満に低下したとき、シリーズ運転モードに切り換える。
(もっと読む)
運転支援装置
【課題】自車両周囲の車両交通流に悪影響を与えないようにしつつ、経済運転を実現させる運転支援装置を提供すること。
【解決手段】車両に搭載され、経済運転実現のために運転者による運転操作を支援する運転支援装置に、自車両が一時停止しようとしている目標停止位置を検出する停止位置検出手段と、エンジンブレーキを使用することにより、摩擦ブレーキを用いずに自車両を上記目標停止位置で一時停止させようとするときに、燃料カットオフ制御が開始されるべき位置を算出する開始位置算出手段と、自車両後方を走行する後続車及びその後続車との車間距離を検出する後続車検出手段とを設け、開始位置算出手段が、後続車検出手段により後続車が検出されたとき、自車両が停止するまで上記車間距離が所定距離以上に保たれるように、算出した燃料カットオフ制御開始位置を修正するように構成する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
1 - 14 / 14
[ Back to top ]