
Fターム[3D244AA25]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 追突防止、車間距離保持 (389)
Fターム[3D244AA25]に分類される特許
381 - 389 / 389
先行車追従走行制御装置

【課題】 追従走行モード切り換え時の利便性を向上する。
【解決手段】 設定車速が設定されている場合は、車速が低速領域から高速領域に入ったときに低速追従走行モードから高速追従走行モードへ自動的に移行する。また、低速領域の追従走行モードから高速領域の追従走行モードへのモード切り換え操作履歴が記憶されている場合は、車速が低速領域から高速領域に入ったときに低速領域の追従走行モードから高速領域の追従走行モードへ自動的に移行する。
(もっと読む)
車両用走行制御装置

【課題】 定速走行を行う車速領域以外の車速領域において先行車追従走行および定速走行における上限車速を設定する。
【解決手段】 先行車追従走行を行う全車速領域を区分して少なくとも低速領域と高速領域を設定し、低速領域では、先行車がいるときは車間距離を保ちながら先行車に追従走行するとともに、先行車がいなくなると先行車追従走行を解除し、高速領域では、先行車がいないときは予め設定した上限車速(設定上限車速)で定速走行するとともに、先行車がいるときは設定上限車速を上限として車間距離を保ちながら先行車に追従走行する車両用走行制御装置において、高速領域以外の車速領域において設定上限車速を設定する。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
車間距離制御装置
【課題】 本発明は、車間距離制御装置に関し、先行車両との関係で自車両が自動停車されることにより停止されたレーダによる照射を適当なタイミングで再開させることにより、車間距離制御を的確に実行させることを目的とする。
【解決手段】 車両前方にレーザ光を照射するレーダセンサを用いて先行車両との車間距離を制御するうえで、先行車両の停車に伴って自車両を停車させる車両停車制御を実行させる。車両停車制御により自車両の停車が開始された際には、レーダセンサによるレーザ光の照射を停止させる。そして、レーダセンサによるレーザ光の照射が停止された後、運転者により照射再開スイッチのオン操作が行われた際には、そのレーザ光の照射を再開させる。
(もっと読む)
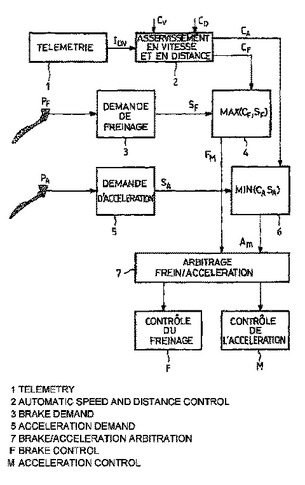
自動車のための距離制御付き速度制限方法及び速度制限装置
本発明は、測距手段と、距離と速度を制御するためのエンジン動作制御手段とが装備された自動車のための距離制御付き速度制限方法及び速度制限装置に関する。本発明の方法は、速度制限方法の起動後に、設定速度を選定し、同じ走行車線に、より低速な自動車が存在しない場合には、自動車の速度が設定速度以下である限りは、アクセルペダルに対する運転者の操作によって、また、設定速度に達するか超過するときには、速度制限方法の非活性化の可能性付きの、自動制御によってエンジントルクを制限することからなる。装備された自動車の前方に、より低速な目標自動車の存在する場合には、本方法は、速度の自動減速と、運転者によって調整可能な、2つの上記自動車の間の一定追随時間の維持と、速度制限方法の非活性化を伴わないで、運転者に本方法によって決定された速度の減速を許容することからなる。
 (もっと読む)
(もっと読む)
自動車の間隔制御システム
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
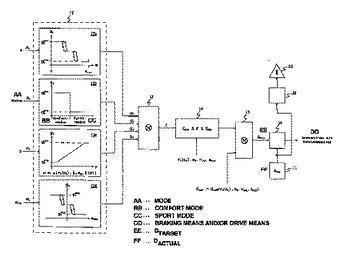
車間距離制御を行う方法及び装置
本発明は、車両内で距離を制御する方法及び装置に関する。本発明に従って、車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。 さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定される。前記重み付け値から、距離変数のための設定値(dsetp)が決定され、これにより、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう制御される。本発明は、重み付け値(gi)を共に掛け合わせて、距離変数の設定値(dsetp)を決定することを特徴とする。
 (もっと読む)
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 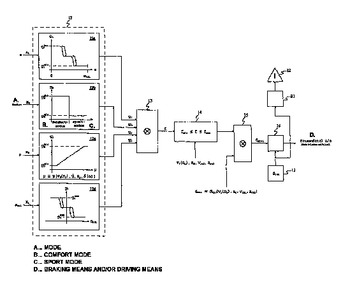 (もっと読む)
(もっと読む)
381 - 389 / 389
[ Back to top ]