
Fターム[3D246HA80]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨー角 (48)
Fターム[3D246HA80]に分類される特許
41 - 48 / 48
車両の走行安全装置

【課題】路面状態設定の適正化を促す。
【解決手段】道路データ記憶部11と、自車位置検出部12と、自車両の車両状態を検出する車両状態検出部13と、自車両の進行方向に存在するカーブを認識するカーブ認識部15と、運転者により路面状態を設定可能な路面状態設定部23と、カーブ認識部が認識したカーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、車両状態検出部13が検出した車両状態と適正車両状態設定部16が設定した適正車両状態とを比較する比較部17と、比較部17の比較結果に基づいて自車両が適正車両状態にないときに安全装置19を作動させる作動部18と、を備える車両の走行安全装置10であって、路面状態設定部23で設定された路面状態が適切であるか否か判定する路面状態判定部24を備え、路面状態判定部24により路面状態の設定が適切でないと判定された場合には、運転者へ報知する。
(もっと読む)
走行支援装置

【課題】 乗り心地を悪化させることなく車線維持支援を行うことができる走行支援装置を提供する。
【解決手段】 走行支援装置1は、自車両のヨー角やオフセット、道路曲率を検出するステレオカメラ11、走行路情報を取得するナビゲーションシステム13、およびステレオカメラ11などの検出結果から目標速度パターンを設定し、該目標速度パターンに基づいてスロットルアクチュエータ31やブレーキアクチュエータ33を制御して車両の速度制御を行うECU20などを備えている。ECU20は、実走行軌跡が目標走行軌跡よりも内側に位置している場合には、カーブ路において、車両を加速するように目標速度パターンを設定し、実走行軌跡が目標走行軌跡よりも外側に位置している場合には、車両を減速するように目標速度パターンを設定し、カーブ路走行時に車両に作用する横加速度との均衡点をずらすことによって横偏差誤差を解消する。
(もっと読む)
走行制御装置
【課題】地震の発生時において、車両により適切な走行を行わせることができる走行制御装置を提供する。
【解決手段】走行制御装置1は、周辺センサ32、周辺車認識部12、緊急地震速報システム受信機、走行制御計画生成部22を備え、走行制御計画生成部22は、緊急地震速報システム受信機により受信した緊急地震速報に基づいて減速及び停止を行う走行計画を生成し、周辺センサ32により取得した車両周辺の障害物状況により、他車との追突及び衝突の危険性がある場合には、衝突及び追突を回避するための別の走行計画を生成する。このため、追突などの危険事象を回避しながら、地震発生時の安全を確保することができる。
(もっと読む)
自動車用電子的安定性プログラム
【課題】車両の電子的安定性プログラム(EPS)を動的に調整し、かつ欠陥を取り除く方法の提供。
【解決手段】計測されたヨー角と設定値ヨー角の差(dCM=LM−LC)に対する、計測された起動閾値(St)を表す消費値(Cesp)の曲線を、時間の関数として確立する段階と、基準閾値(Sv)を、消費値(Cesp)に比例する割合で修正する段階とを含む、各種段階を備えている。
(もっと読む)
横力係数に基づいた車両の走行安定化のための安定化装置及び方法
本発明は車両(10)の操舵される車輪(12,13)の舵角(δ)を制御するための操舵手段(9)と、車両(10)の走行安定化のために前記操舵手段(9)を制御する安定化手段(61)とを有している、車両(10)の走行安定化のための安定化装置に関する。本発明によれば、前記安定化手段(61)が、操舵される車輪(12,13)の少なくとも1つの横力係数(μs)に依存して、車両(10)を安定化させる舵角(δ)設定のために操舵手段(9)を駆動制御し、前記安定化手段(61)は、操舵される車輪(12,13)のスリップ角(α)を、横力係数(μs)がその最大の領域(M1,M2)を実質的に上回らないように設定していることを特徴としている。  (もっと読む)
(もっと読む)
車両の横滑り防止ブレーキ制御システムと制御方法
【課題】ホイールロックが発生しない車両の横滑り防止ブレーキ制御システムと制御方法を提供する。
【解決手段】 本発明は、信号検出ユニットと電子制御ユニットを含む車両の横滑り防止ブレーキ制御システムであって、前記電子制御ユニットは、データ検出モジュール、データ処理モジュールおよびデータ制御モジュールを含み、前記データ検出モジュールは、前記信号検出ユニットのデータ検出を行ない、前記データ処理モジュールは、車輪のスリップ角と滑り率を計算し、前記データ制御モジュールは、異なるスリップ角の場合に、動力係数μのピーク値に対応する滑り率によって、滑り率閾値を設定し、且つ算出した滑り率と設定した滑り率閾値を比較して制御指令を出し、リアルタイムにABS制御を行うことを特徴とする。
(もっと読む)
制御可能なブレーキ装置による自動車の制御方法
本発明は、4つの車輪のブレーキを個別に制御することが可能なブレーキ装置による、自動車の方向の制御方法に関する。本発明の制御方法は、少なくとも自動車の同じ側に取り付けられた前輪(6a)及び後輪(6c)のブレーキを作動させることを特徴とする。ブレーキの作動は、特に、ステアリングホイールに加えられるトルクとステアリングホイールの角度位置の少なくとも一方を含むステアリングホイールに関するデータと、自動車の速度との、少なくとも一方に応じて指令される。  (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 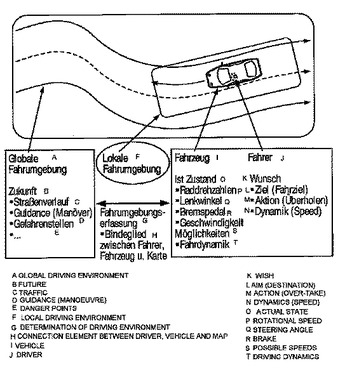 (もっと読む)
(もっと読む)
41 - 48 / 48
[ Back to top ]