
Fターム[3D246HA82]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨー角加速度、ヨーモーメント (63)
Fターム[3D246HA82]に分類される特許
41 - 60 / 63
車両の挙動制御装置および制御方法
【課題】ドライバの意思を的確に反映して制御開始または制御終了がなされることによって、ヨー運動の応答性および収束性を向上し、強アンダーステアや強オーバーステアに陥る頻度が減少する車両挙動制御装置および制御方法を提供すること。
【解決手段】車両の旋回挙動制御装置において、車輪速センサ39と、ハンドル角センサ45とからの信号に基づいて、車両の目標ヨー角速度を算出する目標ヨー角速度算出手段50を備え、目標ヨー角速度とヨー角速度センサ41からの実ヨー角速度との偏差を算出するヨー角速度偏差算出手段51と、該偏差の時間的微分値であるヨー角加速度偏差を算出するヨー角加速度偏差算出手段52と、ヨー角速度偏差と前記ヨー角加速度偏差とに基づいてこれらの値が一定の範囲にあるときに前記車輪間の制動力制御を開始または終了することを特徴とする。
(もっと読む)
車両制御装置

【課題】タイヤの状態をできるだけ反映した各車輪の制御を実現すること。
【解決手段】コントローラ50が、各車輪の接地荷重FZ からコーナリングスティフネスkf,krを求めるのに用いる、ROM52に記憶させたタイヤ摩擦量の区分毎の相関データ(テーブル)を、タイヤ摩耗量の変化に応じて使い分ける。タイヤ摩耗量は、各センサ111,113,115,117の出力を用いて求めた走行距離の累計値からコントローラ50で推定、演算しても良く、外部入力端末60の操作により入力されたものであっても良い。このようにして求めたコーナリングスティフネスを用いて、各車輪の駆動および制動のうち少なくとも一方をそれぞれ独立して制御する際の制御パラメータを求めることで、制御内容がタイヤ摩耗量の状態に応じた正確なものとなる。
(もっと読む)
車両挙動制御装置
【課題】 ヨーレイトセンサの失陥時等における望ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 制動継続時間Tbが第1故障判定閾値Tthに達することで、ステップS13の判定がYesになると、VSA−ECU6は、ステップS14で初期値1.0の制動ゲインGbから所定の漸減値ΔGbを減じた後、ステップS16で制動ゲインGbが0となったか否かを判定する。ステップS13の判定がYesの状態が所定時間続き、ステップS15の判定がYesになると、VSA−ECU6は、ステップS16で制動禁止フラグFpbを1とした後、ステップS17で失陥時処理を実行して制動禁止判定制御を終了する。
(もっと読む)
車輌の走行制御装置
【課題】操舵輪転舵装置の作動速度が制限されることによる運転者の操舵操作に対する車両の旋回応答性の低下を操舵輪の旋回横力に依存しない旋回補助ヨーモーメントにて補填し、操舵輪転舵装置の作動速度が制限される際の車両の旋回応答性の低下を抑制する。
【解決手段】運転者の操舵に依存せずに操舵輪を転舵可能な操舵輪転舵装置24と、操舵輪の旋回横力に依存せずに旋回補助ヨーモーメントを発生可能な旋回補助ヨーモーメント発生手段としての制動装置52とを有する。所定の制御量制限条件が成立し操舵輪転舵装置の制御量が制限されているときには、各車輪の制動力を変更して左右輪の制動力差によるヨーモーメントを発生させることにより、操舵輪転舵装置の制御量の制限が車両に必要な旋回ヨーモーメントに与える影響を低減する。
(もっと読む)
車両の制御装置
【課題】緊急回避時における車両の応答性を向上する。
【解決手段】車両(1)の制御装置は、障害物を回避するための回避力を車両に付与可能である第1回避手段(23a、23b)と、回避力を打ち消す打消力又は回避力を車両に付与可能である第2回避手段(25a〜25d)とを備える車両を制御する制御装置であって、障害物を検知して、検知された障害物との衝突危険度を取得する危険度取得手段(102)と、取得された衝突危険度が危険度閾値より大きいことを条件に、回避力を車両に付与するように第1回避手段を制御すると共に、打消力を車両に付与するように第2回避手段を制御し、車両の運転者が所定種類の回避操作を行った際に、打消力を付与することを停止する又は打消力に代えて回避力を車両に付与するように第2回避手段を制御する制御手段(101)とを備える。
(もっと読む)
衝突回避制御装置
【課題】
前方障害物との衝突回避のために、減速による回避では不十分な場合には旋回による回避を行って確実な障害物の回避を実現するとともに、その回避制御のための計算負荷を低減することで、安全性を損なうことなく簡易な方法で回避制御することのできる衝突回避制御装置を提供する。
【解決手段】
自車前方の障害物までの距離と幅、及び自車速度に基づいて障害物を回避可能な距離を算出して回避すべきか否かを判断し、障害物を回避すると判断した場合に、距離と幅及び自車速度に基づいて車両の横移動量が回避幅を満足するために必要な横加速度を算出する横加速度指令算出手段102と、横加速度指令算出手段で算出された横加速度指令から車両の操舵角度を予測的に算出する操舵角度算出手段104とを備える。
(もっと読む)
電動車両
【課題】左右の後輪を電動モータにより回転駆動する方式の電動車両において、安全にコーナリング特性を向上させる。
【解決手段】ブレーキトルク指令値演算部53において、PIDコントロール部51からフィードバックされた各スリップ率の差分と、ブレーキペダル開度検出部22により検出されたブレーキペダルの開度を示す信号とに基づいて、第1電動モータ7への第1ブレーキトルク指令値BT1及び第2電動モータ11への第2ブレーキトルク指令値BT2を演算し、モータ制御部47では、ブレーキトルク指令値演算部53によって演算された第1ブレーキトルク指令値BT1及び第2ブレーキトルク指令値BT2に基づいて第1電動モータ7及び第2電動モータ11のブレーキトルクを制御する。
(もっと読む)
車両のブレーキ制御装置
【課題】多軸車両に、既存のアンチロックブレーキ装置を組み込むことで、路上走行においては、アンチロックブレーキ制御により安全に走行でき、路外走行においては、車両の操縦性、走行安定性を向上させる。
【解決手段】既存のアンチロックブレーキ制御部130と、このアンチロックブレーキ制御部の上位の制御装置として中間軸ブレーキ制御部30が設けられる。中間軸ブレーキ制御部では、アンチロックブレーキ制御選択時にアンチロックブレーキ制御部をオンにしてアンチロックブレーキ制御を最前軸、最後軸で行なうともに、アンチロックブレーキ制御が中間軸ブレーキ力調整部65〜68に入力されるように切り替えられて中間軸でもアンチロックブレーキ制御が行われる。また、中間軸ブレーキ制御が選択されている場合に、アンチロックブレーキ制御部で行なわれるアンチロックブレーキ制御をオフにするとともに、中間軸ブレーキ制御が行なわれる。
(もっと読む)
ヨー制御解除時の制動抜け感をなくした車輌
【課題】車輪を制動するスピン抑制或いはドリフトアウト抑制のヨー制御に於いて、ヨー制御解除の直後に車輌に制動抜け感が生じることを抑制する。
【解決手段】スピン抑制或いはドリフトアウト抑制のヨー制御ために制動した第一の車輪の制動を解除するとき、第一の車輪の制動によるヨーモーメントに対抗するヨーモーメントを車体に付与する第二の車輪を制動することにより第一の車輪の制動力が残留する時点で第一の車輪の制動によるヨーモーメントを第二の車輪の制動によるヨーモーメントにて相殺し、その後第一および第二の車輪の制動を同時に並行して解除する。
(もっと読む)
車両のヨーモーメント制御装置及びヨーモーメント制御方法
【課題】例えば車体の旋回を終了させる場面等において、車体挙動の安定性を確保することができるようなヨーモーメント制御を行うことを目的とする。
【解決手段】目標ヨーモーメントを設定する目標ヨーモーメント設定手段2と、少なくとも後輪左右10a、10bの制駆動力配分を制御し得る後輪制駆動力配分手段3を含む車体のヨーモーメント制御手段6と、を備え、所定の旋回時には、ヨーモーメント制御手段6は目標ヨーモーメントを発生させ、かつ後輪制駆動力配分手段3は等価コーナリングパワーの低下を抑制する制駆動力配分を行なう。
(もっと読む)
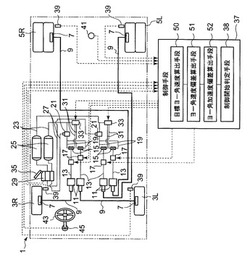
自動車の車両制御装置、及び自動車の制動システム
【課題】各車輪を別個独立したブレーキユニットによって制動する自動車において、各車輪の稼動状態に応じた最適な制動力を制御できる車両制御装置及び制動システムを提供する。
【解決手段】車両制御装置100は、電気自動車10の実前後力F^Xと目標車両前後力F*Xとの誤差FeX、実横力F^Yと目標車両横力F*Yとの横力誤差FeY、実ヨーモーメントM^Zと目標ヨーモーメントM*Zとの誤差MeZ、及び、車輪の実前後力F^Xと実横力F^Yに対する各車輪の接地荷重FZiに基づいて定められる各車輪のタイヤ稼働率ηi を用いて、各車輪に対して制御すべき制御前後力FXi’(各車輪の駆動力)を演算する制駆動力演算部129と、演算された各車輪の制御前後力FXi’(駆動力)に基づいて、ブレーキユニット40FL,40FR,40RL,40RRの油圧装置に供給するブレーキ油圧pを制御するブレーキユニット制御部133とを備える。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法
【課題】車両状態が変化した場合にも、要求される車両挙動を実現するためのヨーモーメントを発生させることを可能とする。
【解決手段】左右の車輪3a、3bの制駆動力を独立に制御可能な制駆動手段4と、車両目標制駆動力及び車両目標ヨーモーメントを設定する車両目標値設定手段7と、目標制駆動力及び目標ヨーモーメントに基づいて左右の車輪3a、3bに制駆動力を配分する制駆動力配分手段7と、走行状態に基づいて実現可能な制駆動力及びヨーモーメントを算出する実現可能値設定手段7と、運転者による操舵変化量を検出する操舵変化量検出手段9と、運転者に旋回を要求する旋回要求手段14と、実現可能な制駆動力又はヨーモーメントが車両目標制駆動力又は車両目標ヨーモーメントより小さく、かつ旋回要求手段14から旋回を要求された場合に、操舵変化量に応じて車両目標制駆動力及び車両目標ヨーモーメントを補正する目標値補正手段7と、を備える。
(もっと読む)
連結車両の運動安定化装置
【課題】トレーラを牽引する車両の振り子運動を効果的に抑制することが可能な車両の運動安定化装置を提供することを目的とする。
【解決手段】運動安定化制御ECU25は、微分部25a、周期演算部25b、時定数・ゲイン設定部25c、一次遅れ処理部25d、振り子運動検出部25e、制御量演算部25f、制御量出力部25gを含んでいる。時定数・ゲイン設定部25cは、ヨーレートωの時間微分であるヨー加速度ω’を一次遅れ処理部25dにおいて一次遅れ処理する場合の時定数τとゲインKを、振り子運動によるヨー加速度ω’の周期または周波数の依存の、例えば、関数またはルックアップテーブルのデータを参照して設定する。制御量演算部25fは、ヨー加速度ωd’に対して、所定の定数をその振幅に対して乗じ、ヨー加速度ωd’に対して逆位相のヨー制御量を算出し、制御量出力部25gに出力する。
(もっと読む)
車両の制動力制御装置
【課題】車輪毎に個別に制動力が制御される車両の制動系に於いて、各輪の摩擦制動装置の構成要素の温度が過剰に高くなり得ることを考慮して各輪の制動力を決定する制動力制御装置を提供すること。
【解決手段】本発明の車両の制動力制御装置は、車輪の各々のブレーキディスク温度を監視する手段と、ブレーキディスク温度が所定温度に達した車輪に於ける目標制動力を決定する手段と、その目標制動力に基づいてその他の車輪に於ける目標制動力を決定する手段とを含むことを特徴とする。典型的には、摩擦制動装置の構成要素の温度が所定温度に達した車輪の制動力は低減され、その低減量に基づいて要求ヨーモーメントが維持されるように、その他の車輪の制動力が再配分される。
(もっと読む)
車両の運転支援装置
【課題】現在のみならず将来予測される危険度を自車両と障害物との間の相対運動の様子も的確に考慮して設定しより自然な感覚で最適な回避ルートを通過すべく制御する。
【解決手段】周辺に存在する白線、ガードレール、側壁、立体物のそれぞれを対象として、現在の危険度をリスク関数として求め、立体物の現在の危険度は、自車両に接近する方向への相対速度が大きくなるほど、また、自車両に接近する方向への相対加速度が大きくなるほど大きくなるように補正して、現在のトータルリスク関数を設定し、各時間毎の自車位置における極小点を演算する。そして、各時間毎の目的関数を作成し、該目的関数を最小とする各時間毎の旋回制御量を自車両の旋回制御量として演算し、自車両が各時間毎の旋回制御量で移動したときの各ルート毎のリスク関数を設定し、各ルート毎のリスク関数から最終的な回避ルートを選択し、操舵制御、及び、ブレーキ制御を実行させる。
(もっと読む)
自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点を管理するための方法と装置
本発明は、4つの操舵車輪を有する自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点(17)を管理するための方法に関する。前記方向転換設定点(17)は、路面に対するタイヤの保持力が非対称である状態で制動するときに、方向転換制御ユニット(14)によって生成される。本方法は、路面に対する4つの車輪のタイヤの保持力が非対称である状態で制動することによって生成されるヨートルクを相殺するために、後輪の中間方向転換設定点(2)を計算するステップと、この中間方向転換設定点(2)を、前記後輪の少なくとも1つの方向転換アクチュエータに伝送するステップとを有し、受け入れモジュール(3)を使用して前記中間方向転換設定点の値を監視するステップと、中間方向転換設定点(2)の受け入れモジュール(3)によって生成された情報(5、6)を制動制御ユニット(4)に伝送するステップとを有することを特徴とする。 (もっと読む)
加加速度情報を用いた車両のヨーモーメント制御装置
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度(V)を検出する第1の検出手段と、車両の横方向の加加速度(Gy_dot)を検出する第2の検出手段と、車両のヨー角加速度(r_dot)を検出する第3の検出手段と、を有し、第2の検出手段で検出した車両の横方向の加加速度(Gy_dot)を第1の検出手段で検出した車両の前後方向の速度(V)で除した値(Gy_dot/V)と、第3の検出手段で検出した車両のヨー角加速度(r_dot)との差が小さくなるように、制御手段により車両のヨーモーメントを制御する。
(もっと読む)
車両運動制御装置
【課題】車両旋回運動の不安定度合いを適切に判断し、円滑かつ制御タイミングの早い目標モーメントを算出することで、円滑で高い安定性を確保できる車両運動制御装置を提供することを目的とする。
【解決手段】目標運動状態量から実運動状態量を減算して算出された運動状態量偏差の大小と符号に応じて車両に付与すべきモーメントを算出する目標モーメント算出手段が、運動状態量偏差が正(負)のとき、実運動状態量が正(負)の方向に大きいほど目標モーメントとして適用するヨーレート偏差の割合を連続的に低減する。
(もっと読む)
車両の走行安全装置
【課題】乗員の意思に応じて接触回避支援手段の過剰動作を抑制するようにした車両の走行安全装置を提供する。
【解決手段】検出された物体との接触の可能性があると判断される場合、検出された物体との接触回避を支援する接触回避支援動作を実行すると共に(S18)、車両が走行する道路のデータを記憶し(S20)、車両の位置を検出し(S22)、検出された接触回避支援手段の動作地点を含む道路のデータの所定範囲を接触回避支援手段が動作した後の車両の乗員の操作に応じて接触回避支援手段の過剰動作抑制領域として設定する(S24からS28)と共に、車両が設定された過剰動作抑制領域を走行するとき、接触回避支援手段の動作を抑制する。
(もっと読む)
車両の制御装置
【課題】 慣性力センサを冗長化して、電源やMPUの故障に対する信頼性の向上を図ることが可能な車両の制御装置を提供することである。
【解決手段】 車両の制御装置であって、第1の慣性力センサが検出した慣性力に基づいて車両の運動状態を制御する第1の車両運動制御ユニットと、第1の車両運動制御ユニットとは異なる車両の運動状態を制御する第2の車両運動制御ユニットと、第1の慣性力センサと同一の慣性力を検出する第2の慣性力センサに接続されるとともに、第1及び第2の車両運動制御ユニットと双方向通信可能に接続された中央ユニットとを含んでいる。第1の車両運動制御ユニット及び中央ユニットの少なくとも一方には、第1及び第2の慣性力センサが検出した慣性力を相互比較し、比較結果に基づいて故障を診断する故障診断部を含んでいる。
(もっと読む)
41 - 60 / 63
[ Back to top ]