
Fターム[3D246HA96]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車高、重心高 (28)
Fターム[3D246HA96]に分類される特許
21 - 28 / 28
自動車の走行装置のための調整方法、自動車のための調整システムおよび自動車
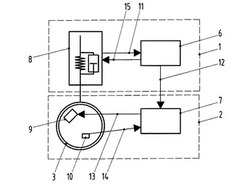
【課題】アンチロックシステムの機能性を改善し、特殊な走行状況での走行安全性を向上する。
【解決手段】自動車の上部構造の緩衝性および減衰性を調整するために、自動車の緩衝状態に関するセンサデータ11が求められ、かつアンチロックシステムが、自動車のホイールのスリップに基づいて自動車のブレーキシステム2内の圧力を調整するための制御信号13を提供する、自動車の走行装置のための調整方法に関するものであり、サスペンションシステム1において、減衰器8を調整するためのモジュール6が設けられており、ブレーキシステム2において、アンチロックシステムが設けられており、該アンチロックシステムが調整モジュール7を備え、該調整モジュール7は、ブレーキ圧を調整するために、センサデータ11および/または該センサデータ11から求められる信号12を供給される。
(もっと読む)
車両のロール角推定方法及び装置

【課題】車高調整前のロール角を推定することが可能な方法及び装置を提供する。
【解決手段】荷重に対して同一の変位特性を有する左右サスペンションの各々が示す内圧値をパラメータとして予め求めた複数個の変位特性の内、自動車高調整後の両サスペンションの内圧値(PL及びPR)間の平均値(PLR)に対応する内圧値の変位特性を車高調整前の各サスペンションの変位特性として選択する。また、該車高調整後の各サスペンションの内圧値(PL及びPR)から各サスペンションに対する荷重(FL及びFR)を算出する。そして、該選択した変位特性と該算出した荷重(FL及びFR)から該車高調整前の各サスペンションの変位(ZL及びZR)を算出して該車高調整前のロール角(φE)を求める。
(もっと読む)
車両の重心位置推定装置及び重心位置/ヨー慣性モーメント推定装置。
【課題】 車両の重心の水平方向位置を車輪の接地荷重値を用いず推定する装置を提供すること。
【解決手段】 本発明の車両に於ける重心の位置を推定する装置は、車両のヨー角加速度の大きさが所定の基準値より小さいとき、車両の車輪と路面との間にて路面から車輪へ水平方向に作用するタイヤ発生力に起因する車両の車体に発生するヨーモーメントの釣り合いに基づいて車両の重心の水平方向位置を推定することを特徴とする。推定された重心位置を用いて、車両のヨー慣性モーメントも推定されてよい。
(もっと読む)
車両用制動制御装置
【課題】制動操作量に対する車両減速度の増大特性を概ね一定に維持しつつ、2系統の液圧配管の制動液圧配分を調整して車両の方向安定性を確保すること。
【解決手段】この装置は、制動操作量が微小値(「0」を含む)に達した時点から、マスタシリンダ圧に、液圧ポンプと電磁弁とにより調整される補助圧力を加えて制動圧力(ホイールシリンダ圧)を発生させる。制動操作量に基づいて補助圧力基準値が決定される。車両の荷重状態、走行状態、車輪状態等に基づいて、2系統の液圧配管で個別に補助圧力が補助圧力基準値に対して修正される。前後配管の場合、前輪系統側が増加修正され、後輪系統側が減少修正される。ダイアゴナル配管の場合、旋回外側前輪を含む系統側が増加修正され、旋回内側前輪を含む系統側が減少修正される。これにより、後輪側のコーナリングフォースが確保される等により車両の方向安定性が確保され得る。
(もっと読む)
車両の横転危険度判定装置
【課題】車両の横転危険度の判定に際し、横転の危険性が無い場合の誤判定を防止することが可能な装置を提供する。
【解決手段】第1の横転判定部40が、車両のロール角X及びロール角速度Yに基づき該車両の横転危険度を判定する。第2の横転判定部80が、該車両に生じている横加速度Gyeが所定の閾値GTh1を超えた時点から、横加速度Gyeが閾値GTh1以下に変化し且つ第1の横転判定部40で該横転危険度が低いと判定される時点まで該車両の横転危険度が高いと判定する。最終判定部90が、第1及び第2の横転判定部40及び80で共に該横転危険度が高いと判定された時以外は、該車両の横転危険度が低いと最終判定する。
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
ブレーキ装置
【課題】ブレーキ操作の緊急の度合いに応じて最適なブレーキ力を発生させ、車両の停止に必要な距離を短縮させることができるブレーキ装置を提供する。
【解決手段】ブレーキペダルの操作量を検出する操作量検出手段と、ブレーキ力を発生させるブレーキ力発生手段と、操作量検出手段により検出されたブレーキペダルの操作量に応じたブレーキ力を発生させるようブレーキ力発生手段を制御する制御手段と、を有するものであって、制御手段は、運転者のブレーキペダルの操作の緊急の度合いを割り出すブレーキ操作状況判定手段を有するとともに、ブレーキペダルの操作量が減少した際に減少にかかわらずブレーキ力発生手段で発生させていたブレーキ力を保持させるヒステリシス幅をブレーキ操作状況判定手段で割り出された緊急の度合いに応じて変化させる。
(もっと読む)
21 - 28 / 28
[ Back to top ]