
Fターム[3D301EC69]の内容
Fターム[3D301EC69]に分類される特許
1 - 20 / 53
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
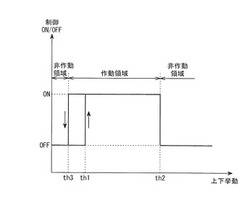
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法

【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車体振動推定装置
【課題】車輪速情報を用いて車体振動を常に高精度に推定し得る車体振動推定装置を提案する。
【解決手段】演算部31,32で平均前輪速VwF=(VwFL+VwFR)/2および平均後輪速VwR=(VwRL+VwRR)/2を演算し、VwF, VwRをバンドパスフィルタ処理部33,34に通して、車体共振周波数付近の成分のみを抽出して取り出し、前輪速VwFの車体共振周波数近傍振動成分fVwFおよび後輪速VwRの車体共振周波数近傍振動成分fVwRを取得する。演算部35,36では、fVwF, fVwRから前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、前輪および後輪の前後変位および上下変位間における固有の関係を基に、Xtf, Xtrから、前軸上方部の上下変位および後軸上方部の上下変位を求め、これら車体前後の上下変位から車体振動(上下バウンス速度dZv、ピッチ角速度dθp)を推定する。
(もっと読む)
車両
【課題】車体の姿勢が変化するときであっても横方向の加速度成分がゼロとなり、車体及び乗員には車体の縦方向軸線と平行な方向の力が作用するので、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する複数のセンサと、車体の要求旋回量を検出する要求旋回量検出手段と、車速を検出する車速検出手段とを有し、横加速度に基づくフィードバック制御を行うとともに、要求旋回量及び車速に基づくフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
車両の減衰力制御装置及び減衰力制御方法
【課題】車体4と乗員1との一体感を向上させることで、乗員1の乗り心地を向上可能な車両の減衰力制御の技術を目的とする。
【解決手段】車体4と車輪6との間に設置された減衰力可変型のショックアブソーバ5の減衰力を減衰力目標値に制御する際に、車体4に対する乗員1の相対変位が大きい場合には、上記相対変位が小さい場合に比べて、上記減衰力目標値を大きく設定する。
(もっと読む)
サスペンション制御装置
【課題】チャタリングの発生を抑制できるサスペンション制御装置を提供する。
【解決手段】車輪と車体との間に設けられ、車体の上下振動に対して減衰力を発生すると減衰力を変更可能なショックアブソーバと、車両のバネ下上下速度V1を検出するバネ下速度演算部12と、バネ下上下速度V1の包絡波形V1_envを逐次生成する逐次包絡波形生成部14と、包絡波形V1_envに基づいてショックアブソーバの目標減衰力F1を演算する目標減衰力演算部15と、を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両
【課題】車両が過剰に傾斜させられてしまうことがなく、旋回安定性を高くすることができるようにする。
【解決手段】傾斜部位を路面に対して傾斜させるためのアクチュエータと、走行用の駆動部と、横加速度を検出する横加速度検出部と、横加速度に基づいてアクチュエータを駆動する傾斜制御処理手段と、加速操作量を制限する条件が成立するかどうかを判断する制限条件成立判断処理手段と、加速操作量を制限する条件が成立する場合に、加速操作量を制限する加速操作量制限処理手段と、加速操作量に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。制限された加速操作量に基づいて車両の走行用の駆動部が駆動されるので、車両が過剰に傾斜させられてしまうことがなくなる。
(もっと読む)
車両用ショックアブソーバ装置
【課題】 マイクロコンピュータを用いることなく簡易な構成で、ばね上部とばね下部との各上下振動を抑制できるようにする。
【解決手段】 抵抗値切替信号出力回路130は、第1抵抗回路121と第2抵抗回路122へ出力するスイッチ信号を使って、電磁式ショックアブソーバ30の減衰特性を変更する。抵抗値切替信号出力回路130は、ばね上アップ信号とばね下アップ信号を入力しているときは、伸長側と圧縮側とをミディアムに設定し、ばね上アップ信号とばね下ダウン信号を入力しているときは、伸長側をハード、圧縮側をソフトに設定し、ばね上ダウン信号とばね下アップ信号を入力しているときは、伸長側をソフト、圧縮側をハードに設定し、ばね上ダウン信号とばね下ダウン信号を入力しているときは、伸長側と圧縮側とをミディアムに設定する。
(もっと読む)
サスペンション装置
【課題】目標アクチュエータ力を、ばね下部に作用させるばね下制御出力の大きさとサスペンション装置の制御系の安定性とを考慮して決定し、乗り心地の向上を図ることができるサスペンション装置を提供すること
【解決手段】サスペンション装置の電動モータ制御装置51は、電動モータの目標アクチュエータ力FPを決定する目標アクチュエータ力決定部60を有する。目標アクチュエータ力決定部60は、ばね下加速度g1に対して特定周波数領域の周波数成分のみ通過させるフィルタ処理部71と、ばね下部に作用させるばね下制御出力F1Bを演算するばね下制御出力演算部73と、電動モータとばね下部の間の伝達特性を表す伝達関数とばね下制御出力F1Bとを用いて要求アクチュエータ力F1Dを演算する要求アクチュエータ力演算部74と、電動モータとばね下部の間に介在する慣性体に生じる慣性力FMを演算する慣性力演算部75と、を備える。
(もっと読む)
ショックアブソーバ装置
【課題】 電磁式ショックアブソーバ30の減速機35の慣性の影響で乗り心地が悪化することを抑制する。
【解決手段】 電磁式ショックアブソーバ30が圧縮動作している場合では、第1スイッチング素子SW1により発電電流を調整して減衰力を制御する。このとき、第2スイッチング素子SW2は、目標減衰係数Cが正であればオフ状態にしておき、目標減衰係数Cが負であればオン状態にしておく。電磁式ショックアブソーバ30が伸長動作している場合では、第2スイッチング素子SW2により発電電流を調整して減衰力を制御する。このとき、第1スイッチング素子SW1は、目標減衰係数Cが正であればオフ状態にしておき、目標減衰係数Cが負であればオン状態にしておく。
(もっと読む)
ショックアブソーバ装置
【課題】 車両の使用度合に比べてブラシの消耗度合が先行しないようにして、ブラシ交換をできるだけしなくて済むようにする。
【解決手段】 電磁式ショックアブソーバの電動モータのブラシ寿命を表す回転数Nlimitに対する現時点までのトータル回転数Ntotalの比であるブラシ消耗度合(Ntotal/Nlimit)と、車両の耐久走行距離Ytargetに対する走行距離Ytotalの比である車両使用度合(Ytotal/Ytarget)とを計算する。車両使用度合に比べてブラシ消耗度合が大きい場合には、目標減衰力F*に補正係数K(>1)を乗じて減衰力を増加させる。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両の減衰力制御装置
【課題】ばね上とばね下との間の見掛けのばね定数が低下するよう減衰力を制御することにより、車両の操縦安定性を低下させることなく車両の乗り心地性を向上させる。
【解決手段】ばね下がバウンド、リバウンドの中立位置にあるときのばね下に対するばね上の相対ストロークXを0として、相対ストロークXの大きさが増大する過程に於いては減衰力を低減修正し、相対ストロークXの大きさが減少する過程に於いては減衰力を増大修正する減衰力修正制御量Faを演算する(S150)。ショックアブソーバ16の減衰力Fdと減衰力修正制御量Faとの和を目標減衰力Ftとし(S160)、目標減衰力Ftに対応する目標減衰係数Ctを演算する(S170)。そしてショックアブソーバ16の減衰係数が目標減衰係数Ctになるよう制御する(S180)。
(もっと読む)
車両のサスペンション装置
【課題】 減衰力変更制御が路面からの振動を減衰することに対して追従できていない場合であっても、乗り心地の悪化を抑制できる車両のサスペンション装置を提供すること。
【解決手段】 サスペンションECU21は、バネ上加速度センサ22から入力したバネ上加速度xpb''を表す信号およびバネ下加速度センサ23から入力したバネ下加速度xpw''を表す信号を比較的高周波側の帯域にてバンドパスフィルタ処理する。そして、バンドパスフィルタ処理によって通過した最大信号振幅bと最大信号振幅aを取得する。次いで、ECU21は、最大信号振幅aに対する最大信号振幅bの比の値と予め「1」以下に設定された性能目標指数αとを比較し、b/aの値がαよりも大きいときは、制御追従性が悪化しているため、バネ上−バネ下相対速度Vが基準相対速度Vo以上のときの要求減衰力Freqを一定の要求減衰力Fconstに設定する。
(もっと読む)
サスペンション制御装置および制御方法
【課題】車両のロールレイトを、旋回状態に影響されることなく高い精度で推定することが可能なサスペンション制御装置およびサスペンション制御方法を提供する。
【解決手段】車両が過渡的旋回状態であると判定された場合には、旋回影響によるロールレイトRllStrが選択され、車両が過渡的旋回状態でないと判定された場合には、路面入力影響によるロールレイトRllBmpが選択され、選択されたロールレイトに基づき、旋回影響によるロールレイトRllStrと路面入力影響よるロールレイトRllBmpとを合成した推定ロールレイトRllが設定される。これにより、旋回状態に影響されることなく、車両2のロール運動を高い精度で推定することができる。
(もっと読む)
1 - 20 / 53
[ Back to top ]