
Fターム[3F022NN03]の内容
Fターム[3F022NN03]に分類される特許
1 - 13 / 13
自動倉庫
【課題】
柱の位置を簡単に精度良く求めると共に、柱の位置を基準とする位置で物品の位置を管理し、しかも柱に依存しない絶対位置に基づいて入出庫装置が停止できるようにする。
【構成】
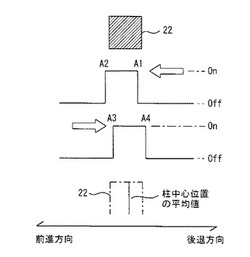
自動倉庫はラックと、ラックに沿って自動倉庫内を走行する入出庫装置とを備えている。入出庫装置は、位置センサと、走行制御部と、ラックの柱を検出する柱センサと、入出庫装置が前進している際と後退している際の双方で、柱センサの信号により柱位置を求める柱位置検出部とを備えている。自動倉庫はさらに、求めた柱位置を記憶する記憶部と、ラックの柱を基準とする位置をラックの柱に依存しない絶対位置に変換する変換部とを備え、走行制御部は位置センサからの信号に基づき変換部で変換した絶対位置に入出庫装置が停止するように停止制御を行う。
(もっと読む)
走行台車システム

【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
在庫管理システム
【課題】比較的簡易且つ安価に物品管理システムを構築することができ、平置き倉庫等の、所謂、フリースペースに設定される複数の物品格納領域に対する物品の格納(入庫)及び搬出(出庫)を、確実に自動管理できる在庫管理システムを得る。
【解決手段】平積み倉庫において、フォークリフト5で物品1の管理を行う物品管理システムを構築するに、フォークリフト5の前後方向の異なった位置に設置される一対の位置検出用タグ6を備え、一対の位置検出用タグ6の位置を検出するタグ位置検出手段71と、検出される一対の位置検出用タグ6の位置に基づいて、設備座標系における物品1の位置を導出する第1導出手段72を備え、導出される物品1の位置に基づいて、その物品格納領域を導出する第2導出手段73を備える。
(もっと読む)
搬送車とその振動数測定方法
【課題】停止位置の確認用に地上側のマークを検出するセンサを備えた搬送車の振動数を測定するために、停止時にセンサの信号のオン/オフの時間間隔から、搬送車の振動数を算出する。
【解決手段】整形回路30は停止位置検出用のセンサS1、S2の信号からエッジを検出し、停止制御部31によりスタッカークレーンを停止し、この時、センサS1、S2が発生する信号のエッジを1/2周期検出部32へ入力する。1/2周期検出部32はセンサS1、S2の信号がオンした後、次にオフするまで、あるいはオフした後、次にオンするまでの時間すなわち振動の1/2周期を求める。平均化部33はこれらの信号のオン/オフ時間間隔を平均化し、さらに平均値を2倍する。逆数算出部34は、平均値の2倍の逆数を求める。この値がスタッカークレーンの昇降台の固有振動数を表す。
(もっと読む)
在庫目録品ホルダーを保管するための方法およびシステム
【課題】目録品システム内に目録品目を保管する。
【解決手段】目録品システム内の目録品目を取り出す方法は、目録品目を指定する取り出し要求を受領することと、複数の目録品ステーションからその取り出し要求に関連付けられた注文を満たす目録品ステーションを選択することを含む。本方法はまた、複数の目録品ホルダーからその目録品目を保管する目録品ホルダーを選択し、複数の移動駆動ユニットから、選択された目録品ホルダーを選択された目録品ステーションに動かす移動駆動ユニットを選択することをも含む。
(もっと読む)
在庫目録品ホルダーを保管するための方法およびシステム
【課題】目録品システム内に目録品目を保管する。
【解決手段】目録品システム内の目録品目を取り出す方法は、目録品目を指定する取り出し要求を受領することと、複数の目録品ステーションからその取り出し要求に関連付けられた注文を満たす目録品ステーションを選択することを含む。本方法はまた、複数の目録品ホルダーからその目録品目を保管する目録品ホルダーを選択し、複数の移動駆動ユニットから、選択された目録品ホルダーを選択された目録品ステーションに動かす移動駆動ユニットを選択することをも含む。
(もっと読む)
自動倉庫におけるスタッカクレーンの運転制御方法およびその装置
【課題】スタッカクレーンの電源オフ時の現在位置と、この電源オフ状態から電源オン時の現在位置との一致・不一致を判断することができる自動倉庫におけるスタッカクレーンの運転制御方法およびその装置の提供。
【解決手段】制御手段22に蓄電器26aを設け、蓄電器26aの電荷漸減に伴い制御手段22の電圧が所定電圧にまで降下したとき、電源のオフ状態を認識させる。オフ状態が認識された時点から制御手段22の機能停止までの間に、スタッカクレーン15の現在位置を電源オフ時現在位置として求め、電源オフ時現在位置を記憶させる。電源をオン状態に切り換えたとき、スタッカクレーン15の現在位置を電源オン時現在位置として検出し、電源オフ時現在位置を呼び出し、両現在位置を照合し、両現在位置が不一致のとき、原点位置へスタッカクレーン15を移動させ、両現在位置が一致するときはスタッカクレーン15を原点位置へ移動させない。
(もっと読む)
物品搬送装置
【課題】走行体の走行作動中における複数の振動モードによる長尺柔軟体の振動を抑制することができる物品搬送装置を提供すること。
【解決手段】走行体に吊り下げ状態又は立設状態で装備された物品支持用の長尺柔軟体と、走行体を設定された走行速度パターンにて走行させるべく、走行速度パターンに基づいて走行駆動手段(HD)を作動させて、走行体の走行を制御する制御手段(27)とが設けられ、長尺柔軟体の走行体側の端部箇所に、当該端部箇所における変形量に対応した検出情報を出力する歪ゲージ(S)が設けられ、制御手段が、長尺柔軟体の振動を抑制するべく、走行体の走行作動中における歪ゲージの検出情報に基づいて、走行速度パターンを補正するフィードバック制御により走行体の走行を制御するように構成されている物品搬送装置。
(もっと読む)
物品搬送装置
【課題】長尺柔軟体の固有振動数が低い場合でも不都合がなく、かつ、走行体が停止するときに逆走しないような制振走行速度パターンを生成することができる物品搬送装置を提供すること。
【解決手段】制御手段(27)が、長尺柔軟体の振動を抑制するべく、振動抑制用の制振走行速度パターンを生成して、この制振走行速度パターンに基づいて走行駆動手段(HD)を作動させるフィードフォワード制御により走行体の走行を制御するように構成され、フィードフォワード制御として、長尺柔軟体の振動モデルの逆システムにより、制振走行速度パターンを生成するように構成されている物品搬送装置を構成した。
(もっと読む)
物品搬送装置
【課題】適正に移載を行うことができながら、物品搬送にかかる時間の短縮化を図ることができる物品搬送装置の提供。
【解決手段】移載装置12には、上下方向に幅を有する範囲を検出範囲Kとして、ビーム8までの上下方向の距離を検出するビーム検出センサ22が設けられ、制御手段は、上下方向において目標移載位置よりも手前に移載装置12を移動させたときにビーム検出センサ22にてビーム8までの上下方向の距離を検出するビーム検出作動を行い、そのビーム検出作動におけるビーム検出センサ22の検出情報に基づいて目標移載位置に移載装置12を昇降させるべく、昇降駆動手段の作動を制御するように構成されている。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
物品収納設備における物品搬送装置
【課題】 収納棚の走行体の走行方向での幅の小型化により、収納棚の製造コストの低下、及び、物品収納設備の設置スペースの小型化、並びに、搬送効率の上昇やランニングコストの低下を図ることが可能な物品収納設備における物品搬送装置を提供すること。
【解決手段】 運転制御手段が、搬入用走行制御、収納用走行制御、及び、搬入用移載制御、収納用移載制御を実行するように構成され、物品の走行体の走行方向での位置を検出する物品位置検出手段が設けられ、運転制御手段が、物品位置検出手段の検出情報L1、L2に基づいて、搬入部から走行体側に移載された物品についての走行体の走行方向での設定適正位置からのズレ量Zを求めて、そのズレ量に基づいて、収納用走行制御における移載作業対象とする物品収納部に対する物品移載位置PH1を補正するように構成されている物品収納設備における物品搬送装置。
(もっと読む)
在庫目録品ホルダーを保管するための方法およびシステム
目録品システム内の目録品目を取り出す方法は、目録品目を指定する取り出し要求を受領することと、複数の目録品ステーションからその取り出し要求に関連付けられた注文を満たす目録品ステーションを選択することを含む。本方法はまた、複数の目録品ホルダーからその目録品目を保管する目録品ホルダーを選択し、複数の移動駆動ユニットから、選択された目録品ホルダーを選択された目録品ステーションに動かす移動駆動ユニットを選択することをも含む。 (もっと読む)
1 - 13 / 13
[ Back to top ]