
Fターム[3F044CE40]の内容
コンベア間の中継 (1,950) | 中継台車 (317) | 移載補助手段を有するもの (79) | 荷台にコンベアを有するもの (22) | 搬送方向が台車の移動方向と直交 (7)
Fターム[3F044CE40]に分類される特許
1 - 7 / 7
搬送車
【課題】搬送車が他の装置からの信号に依存することなく荷物搬出時の移載装置の動作を自律的に止める。
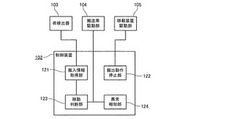
【解決手段】荷物210を搬送する搬送車100であって、他の装置との間で荷物210を搬出入するコンベア式の移載装置101と、移載装置101の搬出入を制御する制御装置102と、移載装置101の所定箇所における荷物210の有無を検出する荷検出器103とを備え、制御装置102は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部121と、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる搬出動作停止部122とを備える。
(もっと読む)
搬送車

【課題】搬送物を搬送する際の移動時間及び移動距離の短縮を図り、搬送効率を向上させること。
【解決手段】有軌道台車10の車体15の上方には搬送物11を搬入及び搬出する移載動作を行う第1移載装置17aと第2移載装置17bを配設する。これら第1,第2移載装置17a,17bは、それぞれの移載動作を独立して制御可能に構成する。これにより、第1移載装置17aの移載動作と第2移載装置17bの移載動作を同時に行うことができる。
(もっと読む)
搬送台車の制御方法
【課題】最小限のセンサで種々の大きさの物品に対応することのできる搬送台車の制御方法を提供する。
【解決手段】搬送台車Tのコンベアの流れ方向両端部に、物品の搬送台車からのはみ出しを検出する一対の第1の光学式センサS1,S4を配置し、これら第1の光学式センサS1,S4の近傍でかつ前記コンベアの流れ方向中央寄りに、物品の端部を検出する第2の光学式センサS2,S3を、それぞれ配設するとともに、コンベアステーションSTと搬送台車Tのコンベアとを同時に駆動して、物品の搬送台車上への移送を開始した後、物品搬入側の第2の光学式センサ(S2)が物品を検出している状態で、かつ、物品搬入側の第1の光学式センサ(S1)が物品を検出しなくなった時に、該搬送台車T上のコンベアを停止させる。
(もっと読む)
台車移動装置
【課題】1つの駆動源の動力によって、移動台車の移動動作と、回転力利用手段による動作とを行うことができ、移動台車へ電力の供給を直接行うことなく、回転力利用手段を動作させることができる台車移動装置を提供すること。
【解決手段】台車移動装置1は、移動台車4、線状の台車引き部材35、駆動源3及び移動停止手段23を有している。移動台車4は、回転力発生部材51、回転制限手段50及び回転力利用手段6を有している。台車移動装置1は、回転制限手段50によって回転力発生部材51の回転を制限することにより、台車引き部材35の走行力を移動台車4の移動力に変換して、移動台車4を移動させるよう構成してあると共に、移動台車4の移動が移動停止手段23によって停止されたときには、台車引き部材35の走行に応じて回転力発生部材51が回転し、回転力利用手段6が作動するよう構成してある。
(もっと読む)
搬送台車
【課題】荷の搬出入の作業効率を向上させることができる小型で低コストの搬送台車を供する。
【解決手段】載置する荷を走行方向と直角方向に移動する移載コンベヤを備え走行駆動源16を有して自ら走行できる駆動台車10と、載置する荷を走行方向と直角方向に移動する移載コンベヤを備える少なくとも1台の従動台車50と、駆動台車10に少なくとも1台の従動台車50を順次連結し、連結する台車間の間隔を変更することができる各連結機構90とを備え、配列された搬出入コンベヤと複数の前記移載コンベヤとの間で荷の搬出・搬入の複数の作業を組み合わせ自由に行うことができる搬送台車。
(もっと読む)
磁性ベルト駆動式軌道搬送方法及び装置
【課題】軌道走行型搬送体により物品を搬送する装置に於いて、搭載した物品を処理する装置の配列順序が物品の処理順序と一致しない場合でも、最短時間で物品を次の処理装置へ搬送でき、スループットを低下させることのない効率の良い搬送方法およびその装置を、低いコストで高い設備拡張性を持たせて、提供する。
【解決手段】物品を搭載した搬送体1を走行用軌道モジュール2の磁性金属製エンドレスベルト21により、複線軌道で駆動する。物品9を搭載の搬送体1が乗っている短尺軌道モジュール6aを平行移動機構7により通常走行位置、処理装置10のワーク授受位置、隣接走行用軌道モジュールの反対方向軌道位置の間で切替え、物品処理装置10で物品の処理を行った後、必要な場合には搬送体1が逆方向の軌道に移り、後続の搬送体の走行を妨げることなく、後戻りして搬送する。短尺軌道モジュール6bは6aがワーク授受位置に在る時に通常走行位置に在り、後続搬送体の通過走行を可能とする。
(もっと読む)
搬送車
【課題】物品に伝達される走行する際の振動を抑制し、搬送コンベアにて物品を搬送する際は搬送コンベアの高さを一体高さに維持させる。
【解決手段】物品を水平方向又は略水平方向に載置搬送する搬送コンベア7を車体5に備え、前記搬送コンベア7を車体5に対して昇降移動可能に支持するコンベア支持手段6を、昇降移動可能に前記搬送コンベア7を弾性支持する弾性支持状態、及び、下降移動を規制するように前記搬送コンベア7を支持する規制状態に切り換え可能に構成する。
(もっと読む)
1 - 7 / 7
[ Back to top ]