
Fターム[3F072GE09]の内容
Fターム[3F072GE09]に分類される特許
1 - 4 / 4
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法

【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
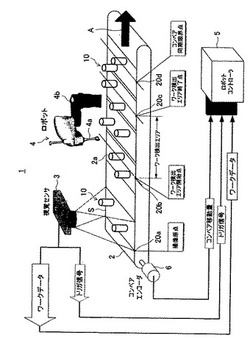
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
自動作業システム
【課題】データキャリアに対する情報の書込み或は読取りのために、搬送手段を停止させずとも済む自動作業システムを提供する。
【解決手段】データキャリアをワーク2に設け、第1および第2のロボットアーム5および8の先端部にリードライト装置を設ける。検査装置4での検査結果情報をデータキャリアに書き込む動作を、第1のロボットアーム5の先端部が検査装置4のワーク2に接近してから当該ワーク2を搬送中のパレット3上に載置して上昇するまでの間に行う。そして、ワーク2を検査結果に応じて良品収納ケース6或は不良品収納ケース7に分けて収納するために、データキャリアに書き込まれた検査結果情報を読み取る動作を、搬送中にあるワーク2に追従して移動するようになってからワーク2を把持してベルトコンベア装置1から取り出すまでの間に行う。
(もっと読む)
1 - 4 / 4
[ Back to top ]