
Fターム[3F072KD29]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 往復動 (266) | 軌跡が往復で異なるもの (3)
Fターム[3F072KD29]に分類される特許
1 - 3 / 3
物品保持装置
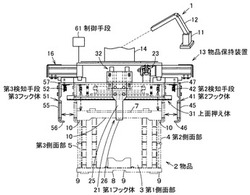
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
ハンドリング装置、制御装置及び制御方法

【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
容器取り出し供給装置
【課題】 コンベアを停止させずに定速連続走行させつつ、コンベアの搬送部上の物品に容器を配置できる容器取り出し供給装置を提供することを目的とする。
【解決手段】 コンベアの搬送部12は定速連続走行し、容器供給部40はコンベアの搬送方向とその逆方向で往復動可能な移動基台41と移動基台に支持され、マガジンからの容器を取り出す取出部材42A,43Aをもつ供給部材42,43とを有し、移動基台41は、マガジンからの容器の取出し時には停止し、容器を搬送部へ配置するときには搬送部と同速で同方向に移動し、供給部材42,43はマガジン44,45からの容器Dの取出し後、容器の開口を下向きに保持するように回動可能でかつ容器を搬送部上の物品Mに対して覆って配置するように移動基台41に対して移動可能であると共に、容器の搬送部12上の配置後は、移動基台41と供給部材42,43はマガジン44,45からの容器の取出し位置へ戻る。
(もっと読む)
1 - 3 / 3
[ Back to top ]