
Fターム[3F112QA01]の内容
線材用巻芯等の交換、搬送、口出し (1,564) | 制御、調整手段 (9) | 電子回路によるもの (7)
Fターム[3F112QA01]に分類される特許
1 - 7 / 7
綾巻きパッケージを形成するための繊維機械
【課題】互いに並列して配置されている巻取り部を有していて、これらの巻取り部は巻取りパッケージに接近可能な吸込みノズルをそれぞれ有しており、この吸込みノズルは共通の負圧供給装置に接続されている形式の、綾巻きパッケージを形成するための繊維機械の融通性を改良し、特に綾巻きパッケージのいわゆる上糸の収容を最適化することである。
【解決手段】吸込みノズル12に、該吸込みノズルの吸込み作用を変えるための装置14が対応配置されていて、該装置は制御可能な駆動装置15によって調節可能であり、かつ巻取りパッケージに巻きつけられた糸の種類に関連して、所定の開放位置に調節可能であり、吸込み作用を変えるための装置14が、駆動装置15によって、あらかじめ規定可能な時間内であらかじめ規定可能な開放位置の間で調節可能である。
(もっと読む)
巻取ユニット、自動ワインダ、及び給糸ボビンの位置合わせ方法

【課題】給糸ボビンの長さ等に関わらず給糸ボビンの位置を目標位置に対して確実に合わせることが可能な巻取ユニットを提供する。
【解決手段】ワインダユニット(巻取ユニット)は、ボビン保持部と、長さ情報取得部と、位置検出部と、記憶部と、ユニット制御部と、を備える。ボビン保持部は、給糸ボビンを保持する。長さ情報取得部は、給糸ボビンの軸方向の長さに関する情報である長さ情報を取得する。位置検出部は、ボビン保持部に保持された給糸ボビンの位置を検出可能である。記憶部は、解舒基準位置の情報と、位置検出部が設けられている位置の情報と、を記憶する。ユニット制御部は、長さ情報に基づいて、ボビン保持部に保持された給糸ボビンを位置検出部が検出できるように当該位置検出部を移動させる制御と、長さ情報及び記憶部の記憶内容に基づいて、給糸ボビンを解舒基準位置に合わせるように当該給糸ボビンを移動させる制御と、を行う。
(もっと読む)
糸巻取機及び糸案内方法
【課題】新しく供給された給糸ボビンから糸を引き出す際に、糸寄せレバーによって糸を適切にガイドすることが可能な糸巻取機を提供する。
【解決手段】自動ワインダは、ボビン支持部7と、下糸案内パイプ25と、ボビン供給装置60と、ボビン供給装置駆動モータ41と、ボビン支持部駆動モータ43と、糸端保持口66と、糸寄せレバー31と、制御部6と、を備える。ボビン支持部7は、給糸ボビン21を支持する。ボビン供給装置駆動モータ41は、ボビン供給装置60を駆動する。ボビン支持部駆動モータ43は、ボビン支持部7を駆動する。制御部6は、糸寄せレバー31の駆動を制御する。そして、糸寄せレバー31は、ボビン供給装置駆動モータ41及びボビン支持部駆動モータ43とは別に設けられた専用の駆動手段である糸寄せレバー駆動モータ42によって駆動される。
(もっと読む)
巻取ユニット及び糸巻取機
【課題】巻取作業の作業速度を向上し、かつ、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる巻取ユニットを提供する。
【解決手段】巻取ユニットは、糸端の捕捉作業時に、接触部材64が、捕捉パイプ50に接触して吸引口50aとパッケージPの表面との距離を規定するように構成されている。そのため、糸端の捕捉作業時に捕捉パイプ50がパッケージPに対して旋回する速度を向上し、吸引口50aがパッケージPに衝突することを防止することができる。また、巻取ユニットは、接触部材64と捕捉パイプ50が接触する接触位置Fを、接触部材調整モータ58によって変更可能に構成されているので、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる。
(もっと読む)
繊維機械
【課題】 オペレータによる玉揚げ作業がドッフィングタイマの報知に従って玉揚げ時間中に行われない場合でも、品質管理データとパッケージとを対応付けることができる繊維機械の提供を目的とする。
【解決手段】 ドッフィングタイマ65によりパッケージPの満管を報知する繊維機械であって、パッケージPの回転状態を検出する回転状態検出部48と、回転状態検出部48からの検出信号に基づいて、玉揚げ作業が行われたことを判定する玉揚げ判定部61と、パッケージPの品質管理データを記憶し、玉揚げ判定部61からの玉揚げ信号に基づいて、品質管理データの記憶を完了するデータ管理部62と、を備えた繊維機械とする。
(もっと読む)
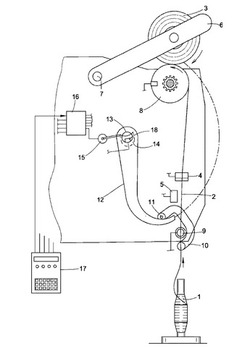
自動ワインダー装置、および自動ワインダー装置における玉揚機の制御方法
【課題】自動ワインダー装置において、相互干渉位置に存する二台のユニットから玉揚げ処理の要求が出された場合でも、玉揚機を無駄なく走行移動させて、作業効率良く玉揚げ処理を実行できるようにすることにある。
【解決手段】ユニット2・2の満管パッケージ作成の進捗状況と、各玉揚機4a・4bの現在位置からユニット2・2までの距離との二つの要素を判断基準として、両玉揚機4a・4bの走行を制御する。これにて、相互干渉位置に存する二台のユニット2・2から玉揚げの処理要求が出された場合においても、ユニット2・2に対する玉揚機4a・4bの玉揚げ処理の優先順位を予め決定したうえで、両玉揚機4a・4bを一定の距離を置いて走行移動させることができるので、玉揚機4a・4bが他の玉揚機4a・4bに近付いてから停止・反転走行するように、玉揚機4a・4bが無駄に走行する不具合を確実に排除することができる。
(もっと読む)
複数の合成糸を紡糸し、かつ巻取るための装置
本発明は、複数の糸を紡糸し、かつ巻取るための装置に関する。この装置は、紡糸装置と、この紡糸装置の下に配置された、複数の巻取りユニットより成るグループとを有している。各巻取りユニットは、片持ち式に突き出して支承された2つの巻取りスピンドルを備えた可動なボビンリボルバを有しており、これらの巻取りスピンドルにおいて交互に複数の糸が複数のボビンに巻き取られるようになっている。このために、巻取りスピンドルは、ボビンリボルバによって、交互に作業領域と交換領域との間でガイドされる。この場合、巻取りユニットの配置において、少なくとも2つの巻取りユニットが互いに鏡面対称的に配置されている。巻取りユニットのグループによって、できるだけ狭い分割幅を維持するために、2つの巻取りユニットが互いに上下に配置されていて、それによって作業領域で保持された巻取りスピンドル間の間隔が、交換領域で保持された巻取りスピンドル間の間隔よりも小さくなっている。それによって複数の糸を、有利な形式で、左右対称平面から各巻取りユニットに分配することができる。 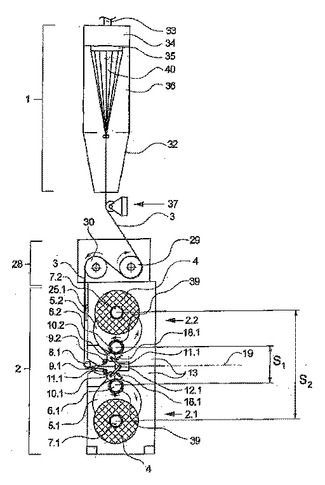 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]