
Fターム[3F204DD00]の内容
クレーンの細部(制御、安全) (2,955) | 自動運転;位置検出以外の検出 (140)
Fターム[3F204DD00]の下位に属するFターム
走行制御;横行制御;巻上制御 (45)
吊り荷の軌跡制御 (15)
在荷検出 (11)
重量検出 (20)
開閉度検出 (1)
検出値の誤差補正 (6)
被搬送物の種類の識別 (6)
省エネルギー (13)
サイクルタイム減少 (14)
ティーチング (5)
Fターム[3F204DD00]に分類される特許
1 - 4 / 4
油圧アクチュエータの駆動装置
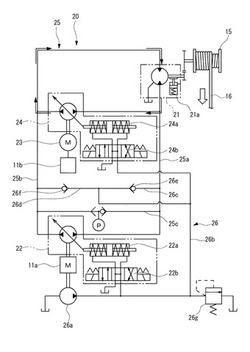
【課題】閉回路の油圧回路において油圧アクチュエータに伝達される運動エネルギーを利用可能なエネルギーとして取り出すことが可能な油圧アクチュエータの駆動装置を提供する。
【解決手段】巻き下げ動作を行う際に下降する吊荷の重さでウインチ15を回転させ、回転するウインチ15によって駆動される油圧モータ21によって駆動回路25の作動油を流通させ、駆動回路25を流通する作動油の圧力によって発電するようにしている。これにより、下降する吊荷の重さがウインチ15に伝わることで生じる回転力を電気エネルギーとして利用することができるので、エネルギー効率を向上させることが可能となる。
(もっと読む)
クレーン制御装置

【課題】専用の巻上位置センサを必要とすることなく、クレーンがいかなる速度であっても最高速度の時と同等のクリープ速度運転区間距離となるように減速制御が可能であり、構成が簡潔なクレーン制御装置を得る。
【解決手段】巻下運転中のクレーンをクリープ速度にまで減速する減速動作を制御するクレーン制御装置において、クレーンを駆動する電動機と、電動機の駆動を制御するドライブ装置と、クレーンの巻下速度を検出する速度検出手段と、クレーン軌道上の所定位置に設けられ、クレーンの所定位置通過を検出する通過検出手段と、巻下運転中のクレーンの所定位置通過を通過検出手段が検出した場合に、クレーンの所定位置通過時における巻下運転速度に基づいて減速開始遅延時間を算出し、クレーンが所定位置を通過してから減速開始遅延時間が経過した後に減速動作を開始するように制御する制御装置本体と、を備える。
(もっと読む)
搬送方法およびこの方法を実施する搬送手段の制御システム
【課題】一般的な天井クレーンを対象とした高次振動を考慮したパワーアシストシステムを構築して,作業者の負担低減とより柔軟な操作を可能とする搬送方法を提供する。
【解決手段】作業者が、天井クレーンをパワーアシストとして用いて荷物を搬送する方法において、天井クレーンのロープ巻揚げドラムから下げされるロープにより吊り下げられて水平移動される荷物に、作業者が操作力である力を加えて、パワーアシストを得ながら作業者が望む方向へ望む速度で当該荷物を移動させるに当たり、ロープの高次振動モードの解析を行い、その結果を基に、高次振動に対してロバストなコントローラをH2/H∞混合制御を用いて設計することを特徴とする。
(もっと読む)
クレーンシステム
【課題】本発明の目的は、クレーンを用いた機器メンテナンス作業において、作業の安全確保、作業時間の短縮及び作業精度向上を図りつつ、自動化することができるクレーンシステムを提供することにある。
【解決手段】クレーンシステムは、フック9を移動するクレーン20と、クレーン20の動作を制御するクレーン動作制御装置18と、クレーン動作制御装置に操作指示を送るクレーン操作装置10とを有する。RFIDリーダ手段11は、メンテナンス対象機器1と、メンテナンス対象機器の構成部品3と、吊りワイヤ5と、枕木8と、位置が変化する移動体14にそれぞれ取り付けられたRFID2,4,6,8,15からメンテナンスに関する情報を読み取り、表示手段13に表示する。
(もっと読む)
1 - 4 / 4
[ Back to top ]