
Fターム[3G093CB05]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 発進時 (433)
Fターム[3G093CB05]に分類される特許
421 - 433 / 433
機械式自動変速制御装置

【課題】 機械式自動変速機構5の変速完了時に、減速等のショックのない、走行フィーリングを悪化させることのないエンジン出力制御を実行可能な機械式自動変速制御装置を提供する。
【解決手段】 変速ECU41のシフト信号生成手段33が変速の完了を検出すると、エンジン出力制御手段25は、エンジン1の回転速度に対応する、回転抵抗を相殺し変速機に駆動トルクを伝達しないエンジン出力をα値マップ27を参照して獲得し、エンジン出力を制御する。エンジン出力制御手段25は、このエンジン出力から所定の変化率で、ドライバーのアクセル操作に対応するエンジン出力になるまでエンジン出力を制御する。
(もっと読む)
車両用パワートレインの出力制御装置

【課題】パワーデマンド制御(又はトルクデマンド制御)を採用しつつ、変速制御によるパワートレインの出力制御を可能とする。
【解決手段】検出された運転状態に基づいて、原動機と自動変速機とを含んで構成されるパワートレインの出力目標値を設定するとともに、検出された運転状態に基づいて自動変速機の変速比し、制御される自動変速機の変速比のもとで、前記パワートレインの出力目標値を実現するように原動機の目標出力を設定し、この設定した目標出力となるように原動機を制御する構成において、自動変速機の変速比の変化に伴うパワートレインの出力変化分に基づいて前記原動機の目標出力を補正する構成を設け、変速制御によるパワートレインの出力制御要求があるときは、前記補正後の目標出力となるように原動機を制御する。
(もっと読む)
ハイブリッド車両及びその制御方法
【課題】大幅に増大された燃料経済と低減された汚損物質の排出とを実現する、改良されたハイブリッド電気車両を提供する。
【解決手段】 内燃機関と、内燃機関を始動可能である第一の電動モータと、車輪にトルクを印加するための電動モータとしてまた車輪からトルクを受け発電機として作動可能である第二の電動モータと、第一及び第二の電動モータに電流を供給し、少なくとも第二の電動モータから充電電流を受ける電池バンクと、内燃機関並びに第一及び第二の電動モータと車輪との間の電気的及び機械的動力の流れを制御するための制御装置とを具備し、車両を推進させるために、もしくは車両を推進させ及び/または電池バンクを充電するために第一及び第二の電動モータの一方または両方を駆動させるために、内燃機関によって発生させられるトルクが、効率的に発生させられる設定値に等しい場合に、制御装置が内燃機関を始動及び作動させる。
(もっと読む)
車両制御装置
【課題】 シフトレバーをニュートラル位置にした場合であっても的確にエンジンを自動停止/自動始動させることができる車両制御装置を提供する。
【解決手段】 制動力保持装置9によりブレーキが作動状態となっているときのエンジン1の自動停止中に、シフト位置のニュートラル位置を検出したとき、ブレーキの再操作でエンジン1を自動始動させる制御装置3を備え、シフトレバーをニュートラル位置にした場合であっても的確にエンジン1を自動停止/自動始動させることができる車両制御装置とする。
(もっと読む)
車両の始動方法,および始動システム
【課題】 手動切替え式のトランスミッションを備える車両を始動させる際に,運転者に必要とされる操作を少なくすることが可能な,車両の始動方法および始動システムを提供する。
【解決手段】 対象物センサと,前記対象物との間隔および自車両の速度を制御する制御装置と,手動切替え式のトランスミッションと,を備える車両を,停止状態から始動させる始動方法において,前記車両を始動させる始動プロセスが,クラッチペダル操作のみに応じて実行される始動方法を提供する。
(もっと読む)
自動車両内の機関・変速機ユニットを調整及び/又は制御するための方法
【課題】 本発明は、自動車両内の機関・変速機ユニット(M、G)を調整及び/又は制御するための方法に関し、この方法は、自動車両の駆動車輪(R)における具体的なモーメント要求を、機関(M)における目標値及び/又は変速機(G)のギヤ比を制御又は調整することにより実現する。是認可能な手間と費用をもって柔軟で且つ確実に拡張され得て、調節可能な数の要求側に適合され得る、前記の形式の方法及び装置を創作する。
【解決手段】 予め設定されている数(n)の要求側(M_XX, …, M_XY)から機関・変速機ユニット(M、G)内で各々転換すべきモーメント事前設定値(M_RAD_SOLL)の計算が行われ、このモーメント事前設定値(M_RAD_SOLL)が電子的な制御装置又は調整装置(CTRL)へと向けられ、更には、モーメント事前設定値(M_RAD_SOLL)の計算が別個の且つ制御装置又は調整装置(CTRL)に対して上位の機能ユニット(MASTER)内で実施されること。  (もっと読む)
(もっと読む)
自動車の自動的縦制御方法および装置
間隔センサを有する、自動車の自動的な縦制御装置および方法が提案され、間隔センサは少なくとも、前を走行する車両に対する自己の、追従する車両の間隔および/または追従する車両に関する相対速度を測定する。測定値から、検出された、前を走行する車両が停止したかが定められるので、追従する車両は前を走行する車両の後方のある距離に停止される。前を走行する車両が再び始動したことが認識された場合には、追従する車両の運転者は始動操作装置を操作しなければならず、その場合に始動操作装置はブレーキペダルである。 (もっと読む)
手動変速機付き自動車のエンジンを制御する方法
手動変速機付き自動車において、走行開始段階の間のエンジン回転数を制限するため自動車の走行状態に応じたエンジントルクの少なくとも1つの許容基準を満たす場合に、自動車のアクセルペダルの位置によって要求される設定エンジントルクに対して減少可能であって、少なくともエンジン特性量に応じて決められた設定エンジントルクが予め定められる。 (もっと読む)
オールスピードガバナを搭載したエンジンのためのトルク速度制御方式
自動車(20)が、ディーゼルエンジン(22)と、自動車の作動に関連したデータ(CAN_TSC_OCM,CAN_TSC_OCM_SA11)を提供する1つ以上のソース(30,36)とを有し、これらソースは、エンジン(22)の外部に位置するが、エンジン(22)の燃料供給に潜在的に影響を及ぼす。エンジン制御システム(24)は、エンジン燃料供給(66)の制御のためにオールスピード調速方式(52)に従ってデータを処理してオールスピード調速燃料供給データ(MFGOV)を作成し、このオールスピード調速燃料供給データ(MFGOV)は、1つ以上のソースからのエンジン制御システム(24)へのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要がないことを示すと、エンジン燃料供給(66)をセットする。かかる1つ以上のソースからのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要のあることを示すと、このデータ入力は、エンジン燃料供給(66)をオールスピード調速方式(52)とは別の方式、特に、トルク速度制御方式(54)によって設定する。  (もっと読む)
(もっと読む)
ハイブリッド車両の駆動部を制御する方法
内燃機関(10)及び電動モータ(24)を備える自動車の駆動部を制御する方法が開示されている。主変速装置(16)は、自動車の駆動軸(19)に接続された出力軸(18)と、内燃機関(10)に接続された入力軸(14)とを備える。電動モータ(24)は、少なくとも二つの変速段を含む中間変速装置(22)を介して、主変速装置(16)の入力軸(14)又は出力軸(16)に結合されている。本発明によれば、自動車は、自動車を停止状態から加速するために、最初は、もっぱら電動モータ(24)によって駆動され、中間変速装置(22)は、その最低変速段にある。内燃機関(10)は、中間変速装置におけるシフト操作の前に駆動機能を受け継ぐ。中間変速装置は、好ましくは、ドグクラッチ変速装置として具体化されている。本発明は、自動車、特に乗用車に適用される。  (もっと読む)
(もっと読む)
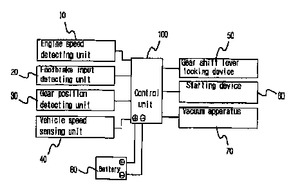
オートマチック車(AT車)を安全に発進させるためのシステム及びその方法
本発明は、事前に急発進事故の発生を防止する、AT車を安全に発進させるシステム及びその方法に関するものである。 該システムは下記を具備する。 エンジンの現回転数を検出するエンジン回転数検出ユニット10と、 フットブレーキが作動状態であるかどうかを検出するフットブレーキ入力検出ユニット20と、 シフトレバーがニュートラル(N)位置にあるどうかを検出するギア位置検出ユニット30と、 該フットブレーキ入力検出ユニットと並行して作動され、車両速度を感知する車両速度センサーユニット40と、 エンジン始動段階で、該フットブレーキが作動状態でなく、該シフトレバーがニュートラル位置になっていないときにはエンジンを始動させず、同時に、上記条件が満たされるようになっても、エンジン始動後にエンジン回転数が基準値未満に下がるまでは、該シフトレバーをニュートラル位置にシフトさせない制御装置100と、 該制御装置の制御下でエンジンを始動させる始動装置60と、 Hydro-vac内の空気を吸入し、該Hydro-vacを真空状態にするために、該制御装置100の制御下で作動される真空装置70。 エンジン始動段階では、該シフトレバーがニュートラル位置になく、該フットブレーキが非作動状態であるために安定した制動機能が無効になると、該エンジンは始動することが許されない。 エンジン始動後、上記条件が満たされた時に、該シフトレバーは、該エンジン回転数が基準値未満に下がるまで、ニュートラル位置から他の位置へシフトすることが許されず、それによって急発進が防止される。
 (もっと読む)
(もっと読む)
車間距離制御装置
【課題】先行車に対する車間距離制御を行う車間距離制御装置において、先行車の発進に追従して発進した際に不必要な自動減速が行われるのを防止してスムーズな発進を可能にする。
【解決手段】所定時間判定手段M9が、セットスイッチ17あるいはリジュームスイッチ18が操作されて自車が車間距離制御を開始してから所定時間内にあると判定し、かつ接近状態判定手段M8が、先行車との車間距離が車頭時間および自車の車速に基づいて設定した目標車間距離未満であると判定すると、目標車間距離設定手段M4が前記目標車間距離を車間距離検出手段M2で検出した実際の車間距離に変更するので、自車が先行車に続いて発進して車間距離制御を開始した直後に、目標車間距離と実際の車間距離との差が大きいために自動減速が行われるのを防止し、発進後のスムーズな加速を可能にしてドライバーの違和感を解消することができる。
(もっと読む)
アイドルストップ車両
【課題】 交差点内での一時停止などの即時発進が要求される状況でエンジン自動停止が実行されるのを防止する。
【解決手段】 コントローラ17は、車両が停車状態となり所定のアイドルストップ条件が成立するとエンジン1を自動停止させるが、発進時の運転状態から右左折発進あるいは路側発進したという第1の条件が成立した場合には、アイドルストップを禁止する。コントローラ17は第1の条件が不成立になっても前記アイドルストップ禁止を継続し、即時発進が要求される状況にないという第2の条件が成立した場合にアイドルストップ禁止を解除する。これにより、即時発進が要求される状況でアイドルストップが実行されるのを防止できる。
(もっと読む)
421 - 433 / 433
[ Back to top ]