
Fターム[3G384EA27]の内容
内燃機関の複合的制御 (199,785) | 演算処理A(制御方式) (7,004) | ニューラルネットワーク (32)
Fターム[3G384EA27]に分類される特許
1 - 20 / 32
内燃機関の排気浄化システム
【課題】内燃機関の始動開始直後から走行している間まで常に選択還元触媒におけるNOx浄化率をその最大近傍に維持できる内燃機関の排気浄化システムを提供すること。
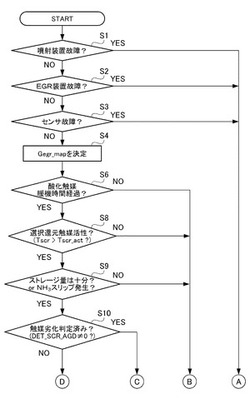
【解決手段】排気浄化システムは、排気管に設けられた酸化触媒及びCSFと、排気管のうち酸化触媒及びCSFより下流側に設けられ、排気中のNOxを選択的に還元する選択還元触媒と、を備える。ECUは、選択還元触媒に流入する排気のNO2−NOx比を選択還元触媒におけるNOx浄化率を最大化する最適値に向けて制御するNO2−NOx比最適化制御について、エンジンの始動を開始してから所定時間が経過するまで、又は、排気系の温度が所定温度未満である場合にはこのNO2−NOx比最適化制御の実行を禁止し、エンジンの始動を開始してから所定時間が経過した後、又は、排気系の温度が所定温度以上である場合にはこのNO2−NOx比最適化制御の実行を許可する。
(もっと読む)
プラントの制御装置

【課題】プラントが非線形系であっても、複数の制御入力および複数の制御量の間に存在する相互干渉を適切に抑制でき、それにより複数の制御量を適切に制御することができるとともに、容易に設計することができるプラントの制御装置を提供する。
【解決手段】制御装置では、相互干渉を抑制するように複数の制御入力TH_cmd、Lift_cmdをそれぞれ補正するための複数の干渉抑制パラメータLift_dc_cmd、TH_dc_cmdの各々の算出が、複数の制御入力のうちの、算出される干渉抑制パラメータで補正される制御入力以外の制御入力を入力とし、当該干渉抑制パラメータを出力として構築されたニューラルネットワークを用いて行われる。
(もっと読む)
車載機器及びプログラム
【課題】より実際のものに近い瞬間燃費を報知すること
【解決手段】 車両のODB2端子に接続ケーブル22を接続し、制御部18は車両から定期的に瞬間燃費を求めるための情報と残燃料の情報を取得する。残燃料の分解能は0.5リットルであるので、0.5リットル消費するごとに残燃料の値が変化する。制御部は、GPS受信器8からの位置情報の履歴から、0.5リットル消費する補正対象期間中に走行した走行距離を算出する。また、その補正対象期間中に得られた瞬間燃費の平均を求め、その平均と平均燃費との比から補正係数を求める。以後は、瞬間燃費に補正係数を掛けて補正することで実際の燃費に近づけることができる。求めた補正後の瞬間燃費は、表示部5に出力する。
(もっと読む)
プラントの制御装置
【課題】プラントの固体ばらつきや経年劣化による推定値の誤差を抑制できるプラントの制御装置を提供すること。
【解決手段】排気浄化システムの制御装置は、NOx量の推定値NOXHATを、複数の入力に基づきニューラルネットワークにより算出するNOx量推定値算出部811と、NOx量と相関のある排気空燃比の推定値ΦHATを、複数の入力に基づきニューラルネットワークにより算出するLAFセンサ出力推定値算出部812と、排気空燃比を検出するLAFセンサ34と、推定誤差EHATを含む複数の入力に基づいて、NOx量推定値算出部811及びLAFセンサ出力推定値算出部812のうちNOx量推定値算出部811のみに入力される適応入力UVNSを算出する適応入力算出部813と、を備える。
(もっと読む)
内燃機関用のトルク推定器
【課題】エンジントルクを決定するための装置を提供する。
【解決手段】エンジントルクを決定するための装置は、クランクシャフト回転データのようなエンジン作動データを入力して、エンジントルクに対応する出力を提供するニューラルネットワークを備える。ニューラルネットワークは、例えば、トレーニングプロセスを使用して獲得されたトレーニングデータを使用して構成されるリカレントニューラルネットワーク(RNN)であることが可能である。決定されたエンジントルクを、例えばスロットル位置のようなエンジン制御入力値から決定される要求エンジントルクと比較することによって、有用なエンジン診断が獲得される。
(もっと読む)
プラントの制御装置
【課題】制御量を所定の条件下で制御するプラントの制御装置において、実際の制御量が上記条件を逸脱したり、逆に制御量を上記条件に拘束する制御が不要に働いたりするのを防止できる制御装置を提供すること。
【解決手段】制御装置に構成された最適化コントローラは、N個の燃焼モデルベースコントローラ7_i(i=1〜N)を備える。燃焼モデルベースコントローラ7_iでは、予測燃料噴射量Ginj_i及び予測燃料噴射時期θinj_iを燃焼モデル711_iに入力したときに、このモデルにより算出される予測最大シリンダ内圧値Pre_Pmax_iが最大シリンダ内圧目標値Pmax_trgtを超えないように予測燃料噴射量Ginj_i及び予測燃料噴射時期θinj_iを補正する。そして、算出された予測燃料噴射量Ginj_i及び予測燃料噴射時期θinj_iに基づいて、燃料噴射量Ginj及び燃料噴射時期θinjを決定する。
(もっと読む)
制御パラメータの適合化システム
【課題】事前に目標となる数値を定めることが困難な制御システムにおいても、最適な適合値を自動的に推定する。
【解決手段】エンジン1から排出される排気ガスの各成分量を分析する排気ガス分析計20の出力に基づいてECU10による空燃比制御における目標空燃比の指示値を制御部40で生成し、排気ガス分析計20及びエンジン1のO2センサの出力に基づいて状態評価部30で空燃比の制御状態を評価する。そして、状態評価部30の評価結果に基づいて制御部40で生成した指示値を適合値推定部50で調整して目標空燃比が最適な値となるように適合させ、最終的にECU10に格納される目標空燃比を確定する。これにより、空燃比目標値を予めマップに格納しておく場合等に、開発者の経験が必要なマップ作成作業を自動的且つ効率的に行なうことが可能となり、車両開発時における工数を低減してコスト低減を図ることができる。
(もっと読む)
制御対象を計測する計測点を最適化するための装置
【課題】制御対象を計測する際の計測点を最適化する。
【解決手段】制御対象について、所定の制御パラメータに対する性能データを計測するための計測点を最適化するための装置を提供する。該装置は、該制御対象のモデルを用い、該制御対象の制御パラメータに対する性能特性を予測して予測性能データ(RSM_est)を算出する。該予測性能データに対して、設定された計測点においてサンプリングし、該サンプリングされた性能データに基づいてサンプリング性能データ(RSM_nm)を算出する。該予測性能データと該サンプリング性能データの間の誤差(Ersm_nm)が最小となるように、計測点の配置を最適化する。好ましい形態では、計測点の数についても最適化される。
(もっと読む)
内燃機関の排気浄化装置
【課題】 リーンNOx触媒に捕捉されているNOx量をより正確に推定し、NOx還元処理を適切に実行することができる内燃機関の排気浄化装置を提供する。
【解決手段】 機関から排出されるNOx量の推定値NOxhat及びNOx還元処理を行うときに排出される還元剤量の推定値Redhatを、ニューラルネットワーク(自己組織化マップ)を用いて算出する(S61,S63)。推定値NOxhat及びRedhatを用いて、リーンNOx触媒31に捕捉されているNOx量の推定値MNOxを算出する(S65,S68)。推定値MNOxに応じて還元処理の実行時期を決定する(S66,S67)。
(もっと読む)
内燃機関の制御装置
【課題】 特別なセンサを使用することなく、機関の特性ばらつきや経年変化に起因する機関の状態を正確に把握することができる、内燃機関の制御装置を提供する。
【解決手段】 自己組織化マップを用いて機関状態を示す機関状態パラメータである距離パラメータDiscaveを算出する(S78)。距離パラメータDiscaveは、現在の機関状態と、標準的な機関状態との相対的な差を示すパラメータである。燃料の主噴射を2つに分割して実行し、その分割比率Rm1を距離パラメータDiscave(k)に応じて補正する(S80〜S82)。
(もっと読む)
吸入空気量推定装置
【課題】コストをかけることなく過渡状態の吸入空気量を精度良く推定する。
【解決手段】面積変換部40はスロットル開度Thに基づいて開口面積Aを算出し、関数推定部41はスロットルバルブ通過前の吸入空気量G1に基づいて圧力比関数φを推定する。続いて、空気量演算部42は開口面積Aと圧力比関数φとに基づきスロットルバルブ通過後の吸入空気量G2を演算する。なお、下流側圧力P2、温度Tおよびガス定数Rに対して所定値が入力される。次いで、演算された吸入空気量G2は、遅れモデル部43を介してエアフローセンサ31を通過する空気量に相当する吸入空気量G1’に変換された後に、関数推定部41の入力側にフィードバックされる。そして、吸入空気量G2から変換された吸入空気量G1’が、エアフローセンサ31に検出された吸入空気量G1に収束するように、吸入空気量G2を演算する際に用いられる圧力比関数φが再び推定される。
(もっと読む)
仮想センサ・システムおよび方法
機械(100)用のセンサ(130)を提供するための方法が提供される。この方法は、機械用の複数のセンサ(140、142)からのデータを含むデータ記録を取得するステップと、複数のセンサの1つに対応する仮想センサを決定するステップとを含み得る。また、この方法は、データ記録に基づいて、少なくとも1つの検出パラメータ(402)と複数の測定パラメータ(406)との間の相互関係を示す仮想センサの仮想センサ・プロセス・モデル(404)を確立するステップと、複数の測定パラメータに対応する1組の値を取得するステップとを含み得る。さらに、この方法は、複数の測定パラメータに対応する1組の値と仮想センサ・プロセス・モデルとに基づいて、実質的に同時に、少なくとも1つの検出パラメータの値を計算するステップと、少なくとも1つの検出パラメータの値を制御システム(120)に提供するステップとを含み得る。  (もっと読む)
(もっと読む)
内燃機関用のトルク推定器
【課題】エンジントルクを決定するための装置を提供する。
【解決手段】エンジントルクを決定するための装置は、クランクシャフト回転データのようなエンジン作動データを入力して、エンジントルクに対応する出力を提供するニューラルネットワークを備える。ニューラルネットワークは、例えば、トレーニングプロセスを使用して獲得されたトレーニングデータを使用して構成されるリカレントニューラルネットワーク(RNN)であることが可能である。決定されたエンジントルクを、例えばスロットル位置のようなエンジン制御入力値から決定される要求エンジントルクと比較することによって、有用なエンジン診断が獲得される。
(もっと読む)
内燃機関のスタート方法および制御装置
【課題】内燃機関の迅速なスタートを可能にし、少ない電気出力しか必要としない可能性を実現し、スタート騒音を低減すること内燃機関のスタート方法を提供する。
【解決手段】内燃機関(2)に、起動可能なダイレクトスタート装置と起動可能な電動式スターター(5)とを備えた、内燃機関(2)のスタート方法において、スタートの間に、少なくとも一時的にダイレクトスタート装置が、燃焼トルクの発生のために起動され、電動式スターター(5)がスタータートルクの発生のために起動され、スタート過程の間に、電動式スターター(5)の制御(開ループ制御又は閉ループ制御)が、実際の総トルクに対応する値が予め設定可能な目標トルクに対応する値を割り込むことがないように行われ、その際、実際の総トルクに対応する値が、実際の燃焼トルクと実際のスタータートルクとの和に相応する。
(もっと読む)
内燃機関の特性パラメータ計測方法
【課題】計測工数を少なく抑えつつ各計測点について比較的信頼性の高い特性パラメータの計測値を得ることができる特性パラメータ計測方法を提供する。
【解決手段】特性パラメータ計測方法では、原則的に触媒温度が安定するまで点火時期を所定値に維持したときに計測される触媒温度を、点火時期が所定値であるときの触媒温度の定常計測値として検出する。そして、触媒温度が安定するまで点火時期を第一の値ig1に維持してから点火時期を中間値ig2へ遅角させ、その後触媒温度が安定する前までの触媒温度を遅角時の触媒温度として検出し、一方、触媒温度が安定するまで点火時期を第二の値ig3に維持してから点火時期を中間値ig2へ進角させ、その後触媒温度が安定する前までの触媒温度を進角時の触媒温度として検出する。そして、遅角時の触媒温度と進角時の触媒温度とに基づいて点火時期が中間値であるときの触媒温度の定常計測値を算出する。
(もっと読む)
車両用駆動力制御装置
【課題】車両の走行に影響を与える外乱に対応して、車両の駆動力を制御する車両用駆動力制御装置において、運転者に与える違和感を抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行に影響を与える外乱に対応して、前記車両の駆動力を制御する車両用駆動力制御装置であって、前記車両が走行環境に基づいて車両の加速度の変更が必要な場所に進入するとき、及び前記走行環境に基づいて車両の加速度の変更が必要な場所を走行しているときの少なくともいずれか一方のときには、前記車両が前記走行環境に基づいて車両の加速度の変更が必要な場所以外を走行するときに比べて、前記駆動力の制御量を減少させる(S3、S4)。前記走行環境に基づいて車両の加速度の変更が必要な場所は、コーナーである。前記車両が前記コーナーを走行しているときの前記駆動力の制御量の減少量は、前記車両の横Gに基づいて決定される。
(もっと読む)
バッテリーの制御装置
【課題】バッテリーの状態を正確に推定し、これに基づいてバッテリーを精度良く制御すること。
【解決手段】NN回路10によりバッテリーの状態を学習する学習手段と、所定時刻におけるバッテリー状態量の目標値の入力を受けて、所定時刻に達するまでの間におけるバッテリーの充放電量を決定する充放電量決定手段と、決定されたバッテリーの充放電量に基づいて、バッテリー状態量を目標値に制御する制御手段と、を備える。実機のバッテリーの状態をNN回路10で学習することができるため、バッテリー状態量の目標値に対して、バッテリーの充放電量を最適に制御することが可能となる。
(もっと読む)
車両用制御システム
【課題】 故障原因の解明が容易となるよう適切にミッシングノードが記録される車両用制御システムを提供する。
【解決手段】 複数の制御ユニットが車内ネットワーク20を介して接続された車両用制御システムであり、該車内ネットワーク20に接続される制御ユニット100〜500は、自身に電源電圧異常が生じた場合に、その旨を、自身を特定するユニット特定情報とともに車内ネットワーク20に送出した上で、車内ネットワーク20との接続を遮断する。他の制御ユニット100〜500は、通信が途絶した制御ユニットから電源電圧異常の旨が通知されていた場合には、当該制御ユニットのノードをミッシングノードとして記録しない。
(もっと読む)
故障診断装置
【課題】システム内の複数のユニットが故障している場合であっても、故障の状態を確実に検知すること。
【解決手段】実機システムが備える複数の要素をモデル化した複数のユニット11,12,13,21,22,23を有するシステムモデルと、複数の要素のそれぞれに発生することが想定される故障をモデル化した故障モデルと、システムモデルのユニット11,12,13,21,22,23を故障モデルに置き換えるモデル置換手段と、システムモデルの出力と、実機システムからの出力を比較する比較手段と、比較手段における比較の結果に基づいて、実機システムの故障を診断する故障診断手段と、を備える。
(もっと読む)
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
1 - 20 / 32
[ Back to top ]