
Fターム[3H082DA39]の内容
Fターム[3H082DA39]に分類される特許
1 - 13 / 13
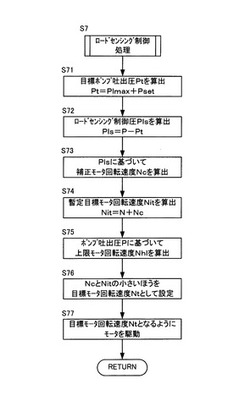
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
圧油装置制御システム

【課題】圧油装置等の点検作業において、人的ミスを防止すると共に、作業者の負担を軽減する。
【解決手段】圧油装置の巡視点検作業時においては、情報処理装置60からの無線方式の開閉信号により自動ドレンバルブ50の開閉が制御され、圧油装置10から所定量の油が集油装置30に放出される。そして、情報処理装置60から送信される無線方式の駆動信号によりポンプ40が駆動し、圧油装置10内の油圧が規定値に戻るように集油装置30内の油が所定量吸い上げられて圧油装置10に供給される。ポンプセンサ42は、ポンプ40のオンロード時間を測定し、無線通信によりポンプ40のオンロード時間を情報処理装置60に送信する。情報処理装置60は、ポンプセンサ42から送信されたポンプ40のオンロード時間等に基づいてポンプ40の吐出量を算出したり、ポンプ40や圧油装置10が正常に動作しているか否かの判断を行う。
(もっと読む)
油圧ユニット
【課題】絞り弁の劣化レベルに応じた警告をユーザに行え、また、絞り弁の劣化レベルに応じたメンテナンスをユーザに促すことができる油圧ユニットを提供する。
【解決手段】油圧ユニット1は、メインライン10からタンク4へ分岐したラインに接続された可変絞り弁7を備え、可変絞り弁7が、メンテナンスを実施するのが望ましい劣化レベル1になっているか否を判定し、可変絞り弁7が劣化レベル1になっていると判定されたときに、可変絞り弁7が劣化レベル1になっているとユーザに警告し、可変絞り弁7が、劣化レベル1より劣化が進んだ劣化レベル2になっているか否かを判定し、可変絞り弁7が劣化レベル2になっていると判定されたときに、可変絞り弁7が劣化レベル2になっているとユーザに警告する。
(もっと読む)
油圧ショベルのアタッチメント制御装置
【課題】オペレータが通常のモードからアタッチメントモードに切り換えることを忘れ、アタッチメントを操作してしまった場合のアタッチメント及びその他の油圧機器の故障や寿命低下を防止することができる油圧ショベルのアタッチメント制御装置を提供する。
【解決手段】
油圧ポンプ3と、アタッチメント用アクチュエータであるブレーカ110を含む複数のアクチュエータと、操作ペダル装置7からの操作パイロット圧により切り換わり、油圧ポンプ3の吐出油をアタッチメント用アクチュエータに供給するアタッチメント用流量制御弁B4を含む複数の流量制御弁とを備えた油圧回路を有する油圧ショベルのアタッチメント制御装置において、アタッチメント選択装置20によってアタッチメントモードが選択されていない状態で操作ペダル装置7を操作したときに、アタッチメント用アクチュエータの動作を制限する。
(もっと読む)
作業機
【課題】走行装置と作業装置とに、同時に高負荷が作用するような場合におけるエンジンストールを防止する。
【解決手段】エンジン駆動されるパイロットポンプP2の吐出油で油圧ポンプの斜板を制御する走行操作装置14と、制御弁92,93を操作する作業操作装置15とを備え、パイロットポンプP2の吐出油を走行操作装置14と作業操作装置15とに供給すべく油圧流路を分岐すると共に、該分岐点と走行操作装置14との間の油圧流路に圧力補償弁55を設け、該圧力補償弁55の上流側に、パイロットポンプP2から吐出されて作業操作装置15に供給される圧油の一部を絞り56aを介してドレンさせるブリード回路56を設ける。
(もっと読む)
液圧装置
【課題】タンクに貯蔵する作動油の温度の相違に係わりなく、液圧ポンプからの吐出流量をほぼ一定にし得る液圧装置を得る。
【解決手段】作動油を貯蔵するタンク10と、タンク10の作動油を吸入して吐出する液圧ポンプ1と、液圧ポンプ1を回転駆動する電動モータ6と、電動モータ6の回転数を制御する制御回路50と、タンク10に貯蔵した作動油の温度を検出する第1温度センサ14とを備える。制御回路50は温度センサ14で検出した作動油の温度が低いほど電動モータ6の回転数を高回転に制御する。更に、液圧ポンプ1の温度を検出する第2温度センサ16を設け、制御回路50は第2温度センサ16で検出した温度が設定温度以上となると電動モータ6の回転を停止する。
(もっと読む)
作業機械のアクチュエータ速度制御装置
【課題】減速制御実施中の油圧アクチュエータに供給される圧油の温度上昇を、比較的簡単な構成で抑制することができる作業機械のアクチュエータ速度制御装置の提供。
【解決手段】作業機械、例えばフロント作業機3を有する油圧ショベルに設けられ、油圧アクチュエータ23に供給される圧油の流量を制限して、油圧アクチュエータ23の作動速度の制御を行う減速制御弁25,26を備えるとともに、油圧アクチュエータ23に供給される圧油の油温を検出する油温センサ27,28と、これらの油温センサ27,28で検出された圧油の温度上昇に応じて、レギュレータ22を可変容量油圧ポンプ21の傾転角が小さくなるように制御し、併せて減速制御弁25,26による減速制御を緩和させるように制御するコントローラ29から成る制御処理手段を備えた構成にしてある。
(もっと読む)
流体圧ユニット
【課題】油圧ポンプのドライ運転を確実に検知することである。
【解決手段】油圧ポンプ(11)の吐出圧力を検出する圧力センサ(17)が設けられている。コントローラ(21)の異常検知部(23)は、圧力センサ(17)の吐出圧力が、予め油圧ポンプ(11)の運転回転数に応じて定められた判定圧力以下になると、油圧ポンプ(11)のドライ運転を検知する。
(もっと読む)
流体圧回路内異物検出装置
【課題】金属物のみならず非金属物の異物も検出できる流体圧回路内異物検出装置を提供する。
【解決手段】タンク11から作動流体を流体圧回路12に供給するポンプ13は、電動機14により駆動する。流体圧回路12からの戻り通路15に対して光センサ16を設ける。光センサ16は、戻り通路15の透明部分を介して、赤外線などを投光する投光器16aと、この投光器16aに対向して配置した受光器16bとを備えたものである。受光器16bは、コントローラ17に接続し、このコントローラ17は、ポンプ13の電動機14に接続する。光センサ16による異物検知によりポンプ13を停止する。
(もっと読む)
油圧装置
【課題】 想定外の負荷の増大や環境の変化による電流値の変化にも対応して、コンタクタの接点を遮断することができる油圧装置を提供する。
【解決手段】 DCモータ11とバッテリ13との間に介在しDCモータ11に電源供給するコンタクタ14の入力側と出力側の電位を計測し、演算装置16はその電位差によりコンタクタ14に流れている電流値を算出すると共に、該電流値を算出する手段により連続して電流値を計測してその値を積算し、その積算値がコンタクタ14の許容連続接点容量に達するとき、コンタクタ14の接点を遮断する制御信号を発信し、この制御信号によりコンタクタ制御部15はコンタクタ14の接点を遮断する。
(もっと読む)
荷役作業機械のエンジン制御装置
【課題】実作業に影響を及ぼすことなく、適切なタイミングでエンジンを停止させ、燃料費の節減と排気ガスや騒音等の低減を効果的に図り得る荷役作業機械のエンジン制御装置を提供する。
【解決手段】エンジン1によって油圧ポンプ2が駆動され、油圧ポンプから吐出される圧油によって荷役作業用作動部4〜6が駆動される。作動部を操作するための操作部7がキャブ内に操作可能に設けられている。エンジン制御装置10は、操作部の操作の有無を検出する操作状態検出手段11と、作動部が荷を吊り上げていない状態にあることを検出する荷役状態検出手段12と、両検出手段からの信号を受け、荷を吊り上げていない状態でかつ操作部の操作がない状態が一定時間経過したときエンジンを停止させる制御手段13とを備える。
(もっと読む)
油圧駆動ファンシステム
【課題】無駄なエネルギを消費しない油圧駆動ファンシステムを提供する。
【解決手段】電磁クラッチ27を介してファン用油圧ポンプ26の入力軸とエンジン・減速機ユニット15の出力軸とを接続し、エンジン・減速機ユニット15からの駆動力がファン用油圧ポンプ26の入力軸に伝達または遮断されるように構成した。そして、油温センサ31で検出した作動油の温度、および、水温センサ30で検出したエンジン冷却水の温度に基づいて、流量制御弁18bおよび電磁クラッチ27を制御することで、送風ファン17の回転を制御する。
(もっと読む)
建設機械の油圧駆動システム
【課題】電磁比例減圧弁の異常を検出して油圧アクチュエータを停止させることができ、しかもシステム構成をシンプルで安価とする。
【解決手段】コントローラ26は、電気レバー装置20,21の操作信号VL1〜VL4、ゲートロックレバースイッチ22の指示信号GL、圧力センサー25の監視信号ELを入力し、駆動信号を電磁比例減圧弁10a又は10b〜12a又は12bにそれぞれ出力し、かつ、信号VL1,VL2;VL3,VL4,GL,ELに基づいて異常を判定し、電磁切換弁24を切り換える信号を出力する。圧力センサー25は、上流側がパイロットポンプ3に、下流側がタンクに接続され、制御弁7〜9のスプールの移動により遮断される油圧信号ライン33の上流側の圧力を検出することで、制御弁7〜9のいずれかのスプールが動作状態にあることを検出し、電磁切換弁24を切り換え、アクチュエータを停止させる。
(もっと読む)
1 - 13 / 13
[ Back to top ]