
Fターム[4C082AP17]の内容
放射線治療装置 (15,937) | 検出 (722) | 装置(の状態)の検出 (186) | (移動)速度 (9)
Fターム[4C082AP17]に分類される特許
1 - 9 / 9
効率的な線量計算を含む線量計算タスクのスケジューリング
放射線治療装置制御装置および放射線治療装置制御方法
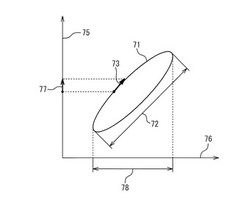
【課題】照射装置から出射される放射線が照射対象を追尾するようにその照射装置を移動させるジンバル装置をより簡素化すること。
【解決手段】被検体の患部の運動71に基づいてジンバル制御方向75とMLC制御方向76とを設定するステップと、治療用放射線の照射野がジンバル制御方向75に移動するように照射装置を移動させるステップと、その照射野がMLC制御方向76に移動するように遮蔽体を移動させるステップとを備えている。このような放射線治療装置制御方法によれば、その照射装置を移動させるジンバル装置をより簡素化させることができ、治療時にそのジンバル装置をより簡素に制御することができる。
(もっと読む)
放射線ビーム分析器及び放射線ビーム分析方法
サイバーナイフ(登録商標)によって生成される放射線の分布及び強度を測定する放射線ビーム分析器である。当該分析器は、センサが配されている小さな水タンクを使用する。センサと放射線源との間の距離は変化しない。水タンクがセンサに対して上昇及び下降させられて、患者の体内の疾患の位置がシュミレーションされる。このタンクの移動は、サイバーナイフ(登録商標)からの放射線が、患者内の疾患の適切な治療のために適切にキャリブレーション及び調整されることを可能にする。第2の実施形態において、放射線ビーム分析器は、放射線源によって生成された放射線の分布及び強度を測定する。分析器は、センサまたは検出器が配される小さな水タンクを使用する。センサと放射線源との間の距離は変化しない。SAD(線源と軸との距離)を一定に維持する2つの方法が存在する。第1の方法は、検出器を保持するホルダを用いて検出器の位置を固定し、小さな水タンクを上昇または下降させる方法である。第2の方法は、上昇及び下降機構を用いて検出器を上方または下方に一方の方向に移動させ、同時に、他の上昇及び下降機構を用いて小さな水タンクを逆の方向に移動させる方法である。第2の方法もSADを一定に維持する。これらの方法は、放射線源に対して検出器を位置決めして、患者の体内の疾患の位置をシミュレートする。このタンクの移動は、放射線ビーム源が、適切にアイソセントリックに測定されることを可能にする。  (もっと読む)
(もっと読む)
回転照射型粒子線医療装置

【課題】静止リングの回転を検知し、移動床を水平に保つように制御する。
【解決手段】建屋側に固定されて固定床及び治療台を有する固定部と、粒子線の照射装置が搭載されて治療台の周りに回転するフレーム1と、フレーム1の内側のガイドリング15に回転自在に支持されてフレーム1の回転に同期して逆回転し、固定部に対して相対的に静止状態が保たれる静止リング13と、静止リング13に支持された移動床14とを備え、固定部側から回転軸の軸方向に静止リング13を見て、静止リング13が時計方向に回転するのを検知する光電センサ(CWセンサ19a,19c)と、反時計方向に回転するのを検知する光電センサ(CCWセンサ19b,19d)を固定部側に配設し、各光電センサに対向する静止リング13の面に光電センサ用反射板20a〜20dを設けた。
(もっと読む)
放射線治療装置制御装置および放射線照射方法
【課題】照射部位の位置を測定する頻度を低減し、かつ、その照射部位の位置を高精度に測定すること。
【解決手段】被検体の運動を示している運動情報を第1センサから収集する被検体運動収集部52と、第2センサがその被検体の照射部位の位置を測定する時間間隔をその運動情報に基づいて変更するセンサ制御部55と、その照射部位に照射される治療用放射線が照射部位の位置に基づいて変化するように放射線治療装置を制御する照射制御部56とを備えている。このとき、放射線治療装置制御装置2は、被検体の運動に基づいて推測される照射部位の動きが鈍いときにその照射部位の位置を測定する頻度を低減することにより、照射部位の位置を高精度に測定しつつ、放射線治療全体での照射部位の位置を測定する頻度を低減することができる。
(もっと読む)
放射線療法線量の分割を適応させるための方法
患者の放射線療法治療計画を適応させるシステムと方法において、任意の個別日に患者へ送達されるフラクションサイズを、少なくとも部分的には日毎患者レジストレーションの使用(即ち、それぞれのフラクションを送達させる前に患者の画像を撮影して当日の腫瘍の位置とサイズを見る)に基づいて変えることによって、適応させるシステムと方法である。フラクションサイズは、腫瘍の生物学に基づき、動的に改変することができる。 (もっと読む)
放射線照射方法および放射線治療装置制御装置
【課題】被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大すること。
【解決手段】治療用放射線を放射する治療用放射線照射装置の位置をセンサ36〜40から収集するステップと、治療用放射線照射装置が移動しているときの速度がその位置に基づいて変化するように、治療用放射線照射装置を駆動する駆動装置31〜35を制御するステップとを備えている。このような放射線照射方法は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するために治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、治療用放射線照射装置が移動することができる範囲を拡大することができる。
(もっと読む)
柔軟な針の制御された操作
【課題】軟らかい組織への挿入中の柔軟な針を、該針の位置を明らかにする画像を用いて閉ループ操作する、コンピューター制御された新規のロボットシステムと、これを用いる方法とを提供すること。
【解決手段】軟らかい組織への挿入中の柔軟な針を操作するロボットシステムは、前記針の位置を明らかにする画像を用いる。途中で危険な障害物を避けつつ所望の目標位置に到達する、前記針の先端部の軌道を制御装置が計算する。逆運動学のアルゴリズムを用いて、前記先端部を前記軌道に従わせるために前記針の基部に必要とされる動きが計算され、ロボットが、制御された前記針の挿入を行う。柔軟な針の変形可能な組織への挿入は、仮想バネにより支持された線形の梁としてモデル化され、前記仮想バネの弾性係数は前記針に沿って変化する。前記針の順運動学及び逆運動学が解析的に解かれ、リアルタイムの経路計画及び修正が可能となる。X線透視画像において行われる画像処理により前記針の形状が検出される。検出された前記針の形状から前記組織の剛性が計算される。
(もっと読む)
患者位置決めアセンブリ用のロボット・アーム
ロボット式患者位置決めアセンブリが、患者治療台と患者治療台に連結されたロボット・アームを備える。ロボット・アームは、5つの回転の自由度と1つの実質的に鉛直な、線形の自由度に沿って患者治療台を移動させるように構成される。 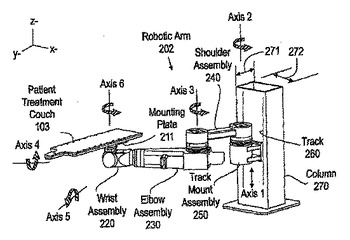 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]