
Fターム[4E089EE01]の内容
Fターム[4E089EE01]に分類される特許
1 - 20 / 152
油圧プレス装置の制御方法
プレス機械の電源装置
板状ワークの湾曲保持装置および湾曲保持方法ならびに湾曲成形方法
プレス機械の制御方法
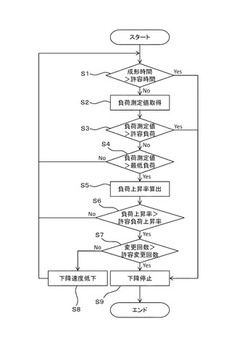
【課題】プレス機械本体や金型が過負荷により破損することを防止するプレス機械の制御方法を提供する。
【解決手段】プレス機械本体や金型などにかかる負荷を測定する負荷測定器1を備え、負荷測定器1で測定された負荷測定値から負荷上昇率を算出し、負荷上昇率が予め定められた許容負荷上昇率を超えた場合に、スライドの下降速度を低下させる。過負荷となる前にプレス機械本体や金型にかかる負荷が下がり、プレス機械本体や金型が過負荷により破損することを防止できる。
(もっと読む)
電動サーボプレス機械

【課題】 急停止の際にクラッチ機構により電動サーボモータを動力伝達経路から切り離した場合に、再びクラッチ機構により電動サーボモータを動力伝達経路に接続する際に、電動サーボモータ側とスライド側との間の位相のずれを無くすことができるようにする。
【解決手段】 本発明に係る電動サーボプレス機械は、電動サーボモータ160とスライド110の間にクラッチ機構150を介装すると共に、クラッチ機構150により電動サーボモータ160と動力伝達経路との連結が切断された切断状態においてスライド110に制動を掛けることができるブレーキ機構200が備えられ、急停止要求に応じてクラッチ機構150を切断状態にしブレーキ機構200により制動を掛ける一方、復帰させる際に、クラッチ機構150を接続した状態において、電動サーボモータ160と、スライド110側の動力伝達経路と、の間の位相ずれが無い状態とされる。
(もっと読む)
サーボトランスファプレスシステム
【課題】干渉回避ができかつ操作性の優れたサーボトランスファプレスシステムを提供する。
【解決手段】マスター位相信号に同期させたプレス用個別位相信号およびトランスファ用個別位相信号を生成可能で、プレス用個別位相信号に基づく基準プレスモーションでプレス運転可能かつトランスファ用個別位相信号に基づく基準トランスファモーションでトランスファ運転可能に形成され、基準干渉線図作成手段と基準干渉線図記憶手段と運転干渉線図作成手段と干渉発生有無比較判別手段と個別位相信号相対関係調整手段とを設け、モーション変更に対して自動的なモーション間位相調整を行うことで干渉がないトランスファプレス運転ができる。
(もっと読む)
鍛造プレス装置およびその制御方法
【課題】サーボモータを駆動するための電源の容量を抑えることができる鍛造プレス装置およびその制御方法を提供する。
【解決手段】スライドSを昇降させる駆動軸ESと、駆動軸ESに連結されたフライホイール30と、駆動軸ESに連結されたサーボモータ40と、サーボモータ40が発電した電気を蓄電しサーボモータ40に電力を供給するコンデンサ54とを備える。フライホイール30の駆動により駆動軸ESが回転している間、または慣性力により駆動軸ESが回転している間、サーボモータ40で発電してコンデンサ54に蓄電するように制御する。コンデンサ54に蓄電した電気を利用してサーボモータ40を駆動できるので、その分サーボモータ40を駆動するための電源51の容量を抑えることができる。
(もっと読む)
サーボプレスおよびサーボプレスの制御方法
【課題】加工対象の負荷の大きさに適した駆動系でプレス機械を駆動することで、省エネルギー化を図った低コストのサーボプレスを提供する。
【解決手段】スライドの駆動軸に連結してスライドを昇降動作する第1サーボモータと、フライホイールを駆動する第2サーボモータと、前記第2サーボモータと前記スライドの駆動軸とを連結・開放するクラッチと、前記第1サーボモータと第2サーボモータの回転を制御すると共に、前記クラッチの連結・開放を制御するプレスコントローラを備え、前記プレスコントローラは、プレスの小負荷時に前記クラッチを開放して前記第1サーボモータの駆動により前記スライドを昇降動作し、プレスの大負荷時に前記クラッチを連結して前記第1サーボモータと第2サーボモータとの駆動により前記スライドを昇降動作させることを特徴とする。
(もっと読む)
鍛造プレス装置およびその制御方法
【課題】下降速度と上昇速度が高速である鍛造プレス装置およびその制御方法を提供する。
【解決手段】スライドSを昇降させる駆動軸ESと、駆動軸ESに連結されたフライホイール30と、駆動軸ESに連結されたサーボモータ40とを備える。上昇工程および/または下降工程において、フライホイール30の駆動により駆動軸ESを回転させてスライドSを上昇および/または下降させるように制御する。発生するトルクの大きいフライホイール30の駆動によりスライドSを上昇、下降させるので、従動系の慣性質量が大きくても駆動軸ESを目的の回転速度まで加速するのに時間がかからない。その結果、上昇速度と下降速度を高速にできる。
(もっと読む)
プレス機械およびその上死点検出方法
【課題】上死点位置を簡単、かつ正確に検出できるプレス機械を提供すること。
【解決手段】プレス機械の制御装置40は、メインシャフトの正回転側および逆回転側のうちの一方側の所定位置に位置したスライドを、前記スライド位置と同じ位置となるように上死点側を越えて他方側に移動させるとともに、該移動中に角度検出器から出力されたパルス数の半分のパルス数分だけ他方側の位置から再度正転側に移動させることで上死点を検出する上死点検出部44を有している。
(もっと読む)
電動プレス成形機の制御方法及び樹脂成形体の製造方法
【課題】型閉じ速度が速い場合や型締め力が小さい場合であっても型閉じ完了後のバウンドの発生を抑制する。
【解決手段】本発明に係る電動プレス成形機1の制御方法は、サーボモーター7,8を有する直圧式の電動プレス成形機1を用い、金型2A,2Bに加わる型締め力が設定型締め力Gに達するまで金型2A,2Bを閉じて熱可塑性樹脂を賦形する賦形工程と、型締め力が設定型締め力Gに達した時から0.01秒以上1秒以下の間、位置決めトルクTpを制御許容値としてサーボモーター7,8を駆動させて金型2Aを位置制御することにより金型2A,2B間の距離を維持する位置決め工程と、設定型締め力Gによる金型2A,2Bの型締めを行う型締め工程とを備え、設定型締め力Gは定格トルクより小さい設定トルクTを制御目標値としてサーボモーター7,8をトルク制御することにより加えられ、位置決めトルクTpは設定トルクより大きい。
(もっと読む)
電動プレス成形機の制御方法及び樹脂成形体の製造方法
【課題】設定型締め力が小さい場合であっても金型の型閉じ速度を安定させる。
【解決手段】本発明に係る電動プレス成形機1の制御方法は、サーボモーター7,8を駆動源とする直圧式の電動プレス成形機1を用い、金型2A,2Bに加わる型締め力が設定型締め力Gに達するまで金型2A,2Bを閉じて熱可塑性樹脂を賦形する賦形工程と、賦形工程の後に、設定型締め力Gによる金型2A,2Bの型締めを行う型締め工程とを備え、賦形工程では、金型2A,2Bの型閉じ速度が予め設定された設定速度Vに達するまでサーボモーター7,8の定格トルクの100%以上のトルクである速度安定トルクTvを制御許容値としてサーボモーター7,8を駆動させて金型2Aの位置制御を行う。
(もっと読む)
サーボプレスの制御装置およびサーボプレスシステム
【課題】ハイブリッド鋼板や差厚鋼板などのように材質や板厚が異なる部位を持つ被加工材を対象にして、部位ごとに最適な加工条件で加工することを可能とするサーボプレスの制御装置を提供する。
【解決手段】サーボプレスの制御装置において、逐次加工プログラムデータ40とモーションデータ変更条件45とを保存する逐次加工制御装置メモリ部37と、駆動指令発信部と、計測指令部39と、計測結果受信部26と、金型アクチュエーター駆動司令部38と、モーションデータ変更部31とを有し、逐次加工プログラムデータ40に従い、一つの被加工材に対して複数回のサーボプレスの駆動と計測器の駆動と金型アクチュエーターの駆動とを行い、一つの被加工材に対する複数回の計測器の駆動により受信した複数の計測結果をもとに、モーションデータ変更条件45に従い、モーションデータを変更する。
(もっと読む)
電動式成形加工機及び、電動式成形加工機の作業原点確立方法
【課題】電動式成形加工機において、成形品の高い加工精度を低コストで実現するための技術を提供する。
【解決手段】電動式プレス加工機1は、上金型6と、上被支持部8と、を含む上金型ユニット2と、上金型6と対向する下金型9を含む下金型ユニット3と、下金型ユニット3に取り付けられると共に、下金型ユニット3に対して上金型ユニット2を相対的に移動させる、複数の加圧ユニット4と、を備える。各加圧ユニット4は、上押圧部18と下押圧部20を有するねじ軸17と、ねじ軸17を駆動することで上金型ユニット2を下金型ユニット3に対して相対的に移動させる駆動源としてのサーボモータ12と、を含んで構成されている。上押圧部18と下押圧部20は、上金型ユニット2がねじ軸17に支持された状態で、上金型ユニット2の上被支持部8が上押圧部18と下押圧部20の間で移動自在となるように配置されている。
(もっと読む)
プレス機械
【課題】ダイクッション側のサーボモータを小型化でき、かつオーバーシュートに関する問題を解決できるプレス機械を提供すること。
【解決手段】スライド2と、スライド2駆動用のサーボモータ17と、ダイクッション7と、ダイクッション7駆動用のサーボモータ49と、サーボモータ17,49を制御入力u1,u2で制御する制御装置18とを備え、制御装置18には、サーボモータ17への荷重指令U1を制御入力u1に基づき生成する第1荷重指令演算部51と、サーボモータ49への荷重指令U2を制御入力u2に基づき生成する第2荷重指令演算部52とが設けられ、制御入力u1,u2は、上型がワークに衝突してから所定時間経過するまでの第1段階でのスライド2およびダイクッション7の終端状態、および所定時間経過してからスライド2が下死点に到達するまでの第2段階でのスライド2およびダイクッション7の終端状態に基づいて演算される。
(もっと読む)
加工機のテーブル駆動装置
【課題】衝撃や時間的なロスを発生することなく、高速度・低トルクの駆動と低速度・高トルクの駆動を切り替えることが可能な加工機のテーブル駆動装置を提供する。
【解決手段】上部テーブル13を駆動させるモータ21を備え、該モータ21の各相のコイルは、それぞれ高速回転用コイル、及び高トルク用コイルの直列接続回路からなり、更に、各相の高速回転用コイルと高トルク回転用コイルの接続点どうしの短絡、開放を切り替える高速回転選択回路62、及び、各相の高トルク回転用コイルの端点どうしの短絡、開放を切り替える高トルク選択回路63を備える。そして、上部テーブル13の高速駆動時には、高速回転選択回路62を短絡し、上部テーブル13の高トルク駆動時には、高トルク選択回路63を短絡し、且つ高速回転選択回路62を開放するように制御する。
(もっと読む)
産業機械
【課題】 フライホイルを用いる産業機械において、駆動用モータ等の寸法増大を抑え、負荷の速度を高自由度で制御できるようにする。
【解決手段】 負荷駆動軸に減速ギアの出力軸を接続し、該減速ギアの入力軸側のギアを第1のモータで駆動し、フライホイルには差動機構を接続し、該差動機構を、そのキャリアに減速ギアの出力軸が接続され、サンギアから入力された回転動力を該フライホイルに伝達しエネルギーとして蓄積させるとともに、該蓄積エネルギーをサンギア側及びキャリア側に放出する構成とし、さらに、該差動機構のサンギアを第2のモータで駆動し、負荷駆動軸の回転角位置に応じ、第2のモータによりフライホイルを加速してエネルギーを蓄積させ、その後、該蓄積エネルギーを放出して第1のモータの不足トルクを補いながら負荷駆動軸を駆動する構成とする。
(もっと読む)
サーボプレスシステム
【課題】高い生産性と確実な干渉回避を担保した円滑運転ができるようにする。
【解決手段】第1搬送運転指令情報生成手段28と、第2搬送運転指令情報生成手段25と、反転領域内動作判別手段34と、搬送運転指令情報切替出力手段46とを設け、振り子モーションでのプレス運転中に、プレス構成要素の現在動作状態が運動方向反転領域内での動作状態でないと判別された場合はプレス構成要素の機械的動作状態に依存して生成された第1搬送運転指令情報を利用し、運動方向反転領域内での動作状態であると判別されたときにはそれに依存せずに生成されかつ連続性が担保された第2搬送運転指令情報を利用して、サーボ搬送装置50を搬送運転可能に形成されている。
(もっと読む)
プレス装置およびプレス方法
【課題】上型と下型との平行度を保障できるプレス装置およびプレス方法を提供する。
【解決手段】上型30と下型40との間に挟まれたワークをプレス成型するプレス装置10であって、プレス装置10は、複数の駆動ユニット20と、コントローラ70と、を具備し、各駆動ユニット20は、上型30の一部と下型40の一部と支持し、上型30の一部を上下移動させることによって上型30を下型40に近接または離間させ、コントローラ70は、ワークを挟むことなく上型30と下型40とを嵌合させた上型30の位置を基準位置D0とし、ワークを上型30と下型40との間に挟んだ状態で、基準位置D0に基づいて、複数の駆動ユニット20を同期して駆動制御し、上型30と下型40とを互いに近接させ、ワークをプレス成型する。
(もっと読む)
サーボプレスの制御装置及び制御方法
【課題】プレスの圧力能力と駆動系のトルク能力に対する過負荷を防止した、サーボプレスの制御装置及び制御方法を提供する。
【解決手段】サーボモータの駆動力を駆動機構を介してスライドに伝達することでプレス成形を行うサーボプレスの制御装置において、スライド目標位置データを算出するモーション演算部と、スライド目標位置データに基いてプレス成形に必要な加工トルクとサーボモータの速度変化に必要な制御トルクに分割するトルク分割部と、分轄された加工トルクを所定の加工制限トルクに制限する加工系制限部と、加工制限トルクと制御トルクとの合成トルクを所定の駆動制限トルクに制限する駆動系制限部を設け、駆動制限トルクの指令に基いて前記サーボモータが駆動されることを特徴とする。
(もっと読む)
1 - 20 / 152
[ Back to top ]