
Fターム[5B047AA19]の内容
Fターム[5B047AA19]に分類される特許
41 - 58 / 58
モバイルデータ処理ハンドセット

【課題】前面4/裏面を持ち、データ処理ユニットを含んでいるケーシング3を備え、前面にデータ入力装置6並びに画像/処理/制御情報を出力するための指示装置5が設けられている、操作員2によって検出された規則違反等を処理するためのモバイルデータ処理ハンドセット1を簡便に操作取り扱いできるようにする。
【解決手段】ハンドセットにデジタル画像検出装置9が配属されており、前面に少なくとも1つの別の画像/処理/制御情報の出力のための指示装置7が設けられておりかつデジタル画像検出装置に接続されている。
(もっと読む)
再帰反射器を位置付けるためのカラー撮像システム

【課題】単一イメージセンサを用いて、マシンビジョンタイプの画像を取得するのと同時に、ユーザによって認識可能なカラー画像を取得する。
【解決手段】撮像システム(100)は、イメージセンサ(102)、該イメージセンサによる軸上の第1の光源(108)、及びコントローラ(106)を備える。前記イメージセンサは、再帰反射器(120)を含む視野の画像を生成するよう構成される。前記第1の光源は、前記再帰反射器を照らすよう構成され、前記コントローラは、前記再帰反射についての前記画像及び位置データを出力するよう構成される。
(もっと読む)
画像処理による監視システム及び方法
【課題】 広い監視範囲をカバーするために、移動し続ける移動体上に搭載したカメラにより監視を行い、撮影画像の中から動く物を検知して、移動体によるパトロールを可能にする。
【解決手段】 本発明は、間隔をあけて移動体に取り付けた複数のカメラを用い、カメラの向きとシャッターのタイミングを調整することにより、前カメラがシャッターを切った地点に、後カメラが来たときにシャッターを切るように構成し、等価的に、同一地点からの同一アングルの時間差をおいた複数画像を得る。これら複数画像の位置合わせを行ない、位置合わせを行った画像の差分を取り、この差分に基づき、画像中の動く物体を検出する。
(もっと読む)
符号化開口画像システム
本発明は符号化開口画像装置および符号化開口画像化方法に関する。一態様では、符号化開口撮像装置は少なくとも1つの検出器アレイおよび再構成可能な符号化開口マスク手段を有する。再構成可能な符号化開口マスク手段は様々な符号化開口マスクを表示して、いかなる可動部または大型の光学構成要素も必要とせずに、様々な視野にわたっておよび/または様々な解像度で画像化を行うことができる。1つよりも多い検出器アレイを使用して継ぎ目なく並べる必要なしに大きい区域の画像化を行うことができ、これは本発明の別の態様を表す。本発明は、可視、紫外、または赤外の波長帯における符号化開口画像化法の使用にも関する。画像復号が湾曲した要素によって導入されるいかなる収差も自動的に除去することができるので、湾曲した光学要素により画像化するための符号化開口画像化法の使用が教示される。 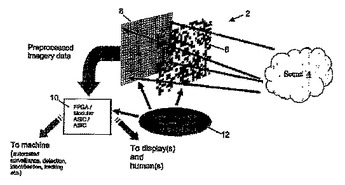 (もっと読む)
(もっと読む)
デジタル画像から物体を検出するための方法、デバイス、およびカメラ
【課題】1台のカメラだけでデジタル画像内の物体を検出できるようにする。
【解決手段】本発明の方法は、
少なくとも1つの第1解像度を有する第1画像ゾーン、および前記第1解像度と異なる少なくとも1つの第2解像度を有する第2画像ゾーンを含む、シーンの収差を有するデジタル画像を、デジタル撮像装置により取得するステップ(E1)と、
収差を有する前記デジタル画像の少なくとも1つのゾーンを展開することにより、展開されたデジタル画像を計算するステップ(E2)と、
前記展開されたデジタル画像内で、物体検出アルゴリズムを実施するステップ(E3a)(E3b)と、
前記展開されたデジタル画像において検出された各物体に関する情報を供給するステップ(E4)とを備える。
(もっと読む)
画像処理装置及びこれを用いる車両用運転支援装置
【課題】 本発明の目的は、外来電磁ノイズを検出することができる画像処理装置を提供することである。
【解決手段】 本発明による画像処理装置は、複数の撮像素子が配列された所定撮像領域をオプティカルブラック領域と画像出力領域とに区分し、画像出力領域における検出レベルを、オプティカルブラック領域における検出レベルを基準として補正することで、出力画像データを生成する画像処理装置において、オプティカルブラック領域での電流値又は電圧値に基づいて算出したノイズ検出レベルが、想定される内部要因ノイズの最大レベルよりも大きい閾値レベルよりも大きい場合に、外来電磁ノイズを検出する外来電磁ノイズ検出手段を備える。
(もっと読む)
車載画像処理装置及び車両用画像処理方法
【課題】カメラモジュールに取付誤差が生じていても、簡単な処理で複数の画像から適切な俯瞰画像を作成できるようにする。
【解決手段】複数のカメラモジュール2で撮像されたカメラ画像データを入力バッファ12に格納し、記憶部15に記憶されたアドレス変換テーブルを用いて、入力バッファ12に格納されたカメラ画像データを出力バッファ16に再配置して、俯瞰画像を作成する。記憶部15には、カメラモジュール2に取付誤差が無い状態でのカメラ画像データを用いて俯瞰画像を作成するためのデフォルトのアドレス変換テーブルを、カメラモジュール2の車両に対する取付誤差を修正するパラメータに従って再構成させたアドレス変換テーブルを記憶させる。
(もっと読む)
画像入力装置及びこの装置を備えた車両の乗員監視装置
【課題】 認識対象となる対象物の画像情報を所定の条件の下に安定させて取得するための画像入力装置を提供する。
【解決手段】 所定位置近傍に存在する対象物の画像情報を取得する画像入力装置10であって、対象物を撮影する撮影手段2と、対象物の存在位置の変位を検出する変位検出手段3と、この変位検出手段3の検出結果に基づいて、撮影方向及び撮影倍率の何れか一方又は双方を制御する制御手段4と、を備える。
(もっと読む)
ステレオカメラシステム及びステレオ光学モジュール
本ステレオカメラシステムは、ステレオ画像を得るためのステレオ光学モジュール(1)と、ステレオ光学モジュール(1)で得られたステレオ画像より対象となる被写体の評価を行う中央制御ユニット(3)と、ステレオ光学モジュール(1)から出力されるステレオ画像データを中央制御ユニット(3)に入力させるための通信回線(2)とから構成される。そして、本ステレオカメラシステムは、ステレオ光学モジュール(1)に、ステレオ光学モジュール(1)で取得したステレオ画像に対して所定の画像処理を施す画像出力処理回路(8)を設け、この画像出力処理回路(8)にステレオ画像撮像時のアンバランスを補正するための補正演算を行わせる。  (もっと読む)
(もっと読む)
車両識別方法及び装置
撮像した車両のナンバープレートから車番を認識する車両識別方法及び装置における字光式ナンバープレートの識別精度を向上させるために、車両の画像フレームをインタレース方式で撮像し、該画像フレームを構成する奇数フィールド及び偶数フィールドに互いに異なる光量の光を照射し、該奇数フィールド及び該偶数フィールドの各画像を取り込んで、一方のフィールドの画像から抽出したナンバープレート領域の文字認識処理に失敗したときのみ、他方のフィールドの画像から抽出したナンバープレート領域の文字認識処理を行う。また、該奇数フィールドの画像及び該偶数フィールドの画像からそれぞれ抽出したナンバープレート領域の文字認識処理を平行して行い、一方のフィールドの画像から抽出したナンバープレート領域の文字認識処理に失敗したときのみ、他方のフィールドの画像から抽出したナンバープレート領域の文字認識処理の結果を該車両の識別結果として採用する。  (もっと読む)
(もっと読む)
車載用顔面データ登録装置及び車両における顔面データ登録方法
【課題】 車両における顔面認証に関して、ユーザにそのためだけの時間をとらせることなくバリエーションある認証用画像を採取し、バリエーションある認証用顔面データの候補の登録を効率良く実現する。
【解決手段】 車両の運転状態に応じて車載機器から出力される特定信号(例えばミラー調整信号)が受信可能となるように前記車載機器に接続され、カメラ10による撮影動作を継続的に実行させる継続的撮影動作を実行し、この継続的撮影動作中に、前記特定信号を受信すると、この特定信号受信の所定時間前から所定時間後までの期間においてカメラ10により撮影された画像に基づくデータを、認証用顔面データの候補として候補データ記憶手段24aに登録する認証用データ採取制御手段(画像処理ユニット20、車両側コントローラ30)を設ける。
(もっと読む)
画像センサ装置および画像センサシステム
【課題】高解像度カメラの画像をリアルタイム処理する画像センサのバス容量や性能をカメラに応じてアップさせずに従来のままで、一次判定用画像の認識精度アップを図る。
【解決手段】一次判定用画像データ(物体検知用)として、高解像度カメラ10の撮影画像(原画像データv)を一定比率で間引き処理した縮小画像データv1を用いる。検出処理部27は、このv1に基づいて車の移動・変化などを検知した場合、フレームバッファ部22の二次判定用の原画像データvの転送要求を転送制御部25に送り、また、検知画素領域を示す検知位置アドレスを詳細解析部28に送る。詳細解析部28は、この転送要求に基づいて受信したvの検知位置アドレス部分の形状や数字などを解析する。(v−v1)をフレームバッファ部に保持する場合や、アドレス生成部24が検知位置アドレスに基づいて解析対象範囲の原画像データのみを詳細解析部28に転送する場合も開示している。
(もっと読む)
画像生成方法および装置
【課題】 暗所の撮影や夜間撮影時に視点変換画像の合成対象撮像手段が撮像する際に効率的に必要な補助光を照射でき、認識度の高い視点変換画像を生成する。
【解決手段】 車両に配置された1又は複数の撮像手段から供給される画像情報に基づいて視点変換画像を生成する画像生成装置である。前記撮像手段による撮像領域を照射する補助光源を備え、この補助光源を視点変換画像毎に切り替えて使用する補助光源を選択する制御手段を設けた。
(もっと読む)
デジタル画像内の影補整のための方法及び装置
本発明は、第1照明源(3)により第1照明角度のもと異なる照明強度で照明可能な場面(7)の計算デジタル画像を生成するための方法に関し、この際、画像センサ(2)により場面(7)の多数の個別画像が異なる照明条件で記録され、データ処理装置内で結果画像の生成のために画素ごとに互いに清算処理される。本発明は、少なくとも1つの他の照明源(4)が設けられていて、この照明源(4)により、場面(7)が、第1照明源(3)の照明角度とは違った照明角度のもと異なる照明強度で照明可能であり、更には、個別画像の記録時、異なる照明条件が、第1照明源(3)の照明強度と少なくとも1つの他の照明源(4)の照明強度との異なる組み合わせにより達成されることにより傑出する。更に本発明は、本発明に従う方法を実施するための装置に関する。  (もっと読む)
(もっと読む)
車載周辺状況検出装置
【課題】効率的に標識等の認識を行う「車載周辺状況検出装置」を提供する。
【解決手段】前照灯制御部5は、前照灯1の点灯/消灯の繰り返しを制御する。特徴領域抽出部10は、前照灯1の点灯時に撮影した点灯時画像a、前照灯1の点灯時に撮影した消灯時画像bを差し引いた画像を差分画像cとして生成し、差分画像c中の高輝度領域を特徴領域404として抽出する。画像認識処理部11は、点灯時画像aの特徴領域404の部分のみを対象として画像認識による標識等の認識を行う。
(もっと読む)
撮像制御装置及びプログラム
【課題】 エネルギーの浪費を抑制し、常に最適な撮像が可能な撮像制御装置及びプログラムを提供すること。
【解決手段】 ステップ110では、メイン投光器3により近赤外光を照射し、ステップ120にて、メインカメラ1により撮像を行う。ステップ130では、サブ投光器7により近赤外光を照射し、ステップ140では、サブカメラ5により撮像を行う。ステップ160では、顔位置を検出する。即ち、メインカメラ1及びサブカメラ5の画像を用いて、三角測量の原理を利用して、顔との距離を求める。従って、2回目からは、各カメラ1、5と顔との距離に応じて、メイン投光器3から照射する近赤外光の好ましい投光量(従ってメイン投光器3のパワー)を算出する。
(もっと読む)
物体検出装置、物体検知方法、およびコンピュータプログラム
【課題】目標物の検出を行う際に撮影環境などに変化が生じても、処理速度をあまり低下させることなく当該検出を正確に行う。
【解決手段】画像の中から人を検出する人体検出装置1に、カメラで撮影されて得られた画像FGを入力する画像入力部101と、互いに異なる方法を用いて、画像FGの特徴を検出する複数のプレーン生成部301〜304と、カメラの撮影に関する事項の条件を取得する手段と、取得された条件の場合の、プレーン生成部301〜304によって検出される特徴の信頼性を求める手段と、1つまたは複数のプレーン生成部301〜304によって撮影画像からそれぞれ検出された特徴および各特徴の信頼性に基づいて撮影画像に写っている人を検出する検出処理部105と、設ける。
(もっと読む)
移動体の周囲監視装置
【課題】 移動体の周囲を容易に確認し、安全性を高める。
【解決手段】 移動体の周囲を監視するための移動体の周囲監視装置は、その周囲の領域の映像を光学像に中心射影変換する光学系と、撮像レンズを含み、前記中心射影変換された光学像を画像データに変換する撮像部とを含む少なくとも1つの全方位視覚センサーと、前記画像データをパノラマ画像データおよび透視画像データの少なくとも一方に変換する画像処理部と、前記パノラマ画像データに対応するパノラマ画像および前記透視画像データに対応する透視画像の少なくとも一方を表示する表示部と、前記表示部を制御する表示制御部とを備える、全方位視覚システムを搭載する移動体の周囲監視装置であって、前記表示部が、前記移動体の周囲を俯瞰する前記透視画像を表示する。
(もっと読む)
41 - 58 / 58
[ Back to top ]