
Fターム[5B057CB20]の内容
画像処理 (340,757) | 処理部 処理後の画像の特性 (70,704) | その他のデータ (125)
Fターム[5B057CB20]に分類される特許
121 - 125 / 125
危険領域を保護する方法および装置
【課題】自動動作機械の危険領域を、設置に大きな費用はかからないが、十分な信頼性をもって保護する。
【解決手段】危険領域(58)、特に自動動作機械(60)の危険領域を保護するために、危険領域(58)の画像は、互いにずれて配置される少なくとも第1および第2画像記録ユニット(16,18)を用いて記録される。場面の画像は、異なる3次元場面分析方法(46,44)を用いて、3次元場面分析を受け、かつ危険領域(58)は、場面分析方法(44,46)の少なくとも一つが異物を検出するとき保護される。  (もっと読む)
(もっと読む)
地盤高推定方法
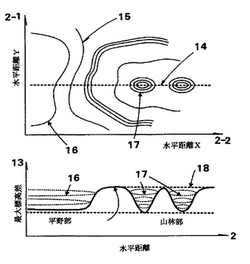
【課題】従来の航空写真測量を用いる方法では、写真測量図化機を操作するオペレータに熟練と勘が必要とされ、さらに図化に長い時間を要した。熟練していなければ、精度が低く、再現性のある測定を実施出来ないと言う課題を有していた。一方レーザスキャナーデータによる方法は各社各様であり、この方法の詳細は公表されておらず、結果も整合性に欠けている、という問題があった。熟練を必要とせず、短時間で精度がよく、再現性のある地盤高測定法が強く望まれていた。
【解決手段】レーザスキャナーデータを利用し、樹冠からの反射点を多く含む上層面データと、地表面からの反射点及び樹冠と地表面の中間に存在する物体からの反射点データより、仮想下層面と仮想樹高分布を求め、仮想樹高分布にデータ処理を施し、補正樹高分布を得た後、上層面と補正樹高分布を用いて地盤高測定法を行うことによって前記課題を解決した。
(もっと読む)
奥行きマップの生成
画像(100)の各ピクセルについて観察者への距離を表す奥行き値を含む奥行きマップ(106)を生成する方法。該方法は:画像(100)を第一のセグメント(110)と第二のセグメント(108)にセグメント分割し;前記第一のセグメント(110)の第一の大きさに基づいて、前記第一のセグメント(110)のピクセルの第一のものに対応する奥行き値の第一のものを割り当て、前記第二のセグメント(108)の第二の大きさに基づいて、前記第二のセグメント(108)のピクセルの第二のものに対応する奥行き値の第二のものを割り当て、前記第一の大きさが前記第二の大きさよりも小さければ前記奥行き値の第一のものが前記奥行き値の第二のものよりも小さいようにする、ことを含む。 (もっと読む)
不正複製防止装置及びその方法並びにプログラム
簡易に印画内容を保護し得る不正複製防止装置及びその方法並びにプログラムを提案する。オリジナル印画紙に有する紋様画像から抽出した紋様パターン(紋様特徴量)を当該オリジナル印画紙に記憶しておき、コード付印画紙XPcの印画内容の複製時に当該印画紙XPcに記憶された紋様パターンに基づいて、オリジナル印画紙OPであるか否かの正当性を検証するようにしたことにより、印画紙自体に有している紋様パターンによりオリジナルの有無を識別することができるため、特殊紙等を用いることなく簡易に不正複製を防止することができ、かくして簡易に印画内容を保護することができる。 (もっと読む)
立体計測装置

【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
121 - 125 / 125
[ Back to top ]