
Fターム[5B057CB20]の内容
画像処理 (340,757) | 処理部 処理後の画像の特性 (70,704) | その他のデータ (125)
Fターム[5B057CB20]に分類される特許
81 - 100 / 125
物体検出装置

【課題】他の車両その他の物体を安定して検出する車載の物体検出装置を提供する。
【解決手段】車両に搭載される物体検出装置であって、対象物までの距離を計測可能な撮像装置と、撮像装置から入力された画像における道路領域を判定する道路領域判定部と、上記道路領域の前方にあり道路領域と判定されなかった領域の物体を所定周期ごとに検知する物体検知部と、車両前方の検知エリアを複数に分割したブロックごとに予め設定された検知回数の物体検知に基づいて物体を認識する物体認識部と、を備え、上記予め設定された検知回数は、検知エリアの端部のブロックについては、上記検知エリアの中央部のブロックよりも小さく設定されている。
(もっと読む)
画像の歪み補正方法および3次元形状計測装置

【課題】歪みの発生要因が複合している場合であっても画像の歪みを補正することができるようにし、しかも簡単な作業で補正量を決定できるようにする。
【解決手段】市松模様が表記された標準パターン板をTVカメラにより撮像する(S1)。TVカメラで得られた歪み検出画像から基本図形に対応した4個以上の基準点を検出する(S4)。歪みが生じない場合の基準点の位置として標準図形から予測される理想基準点を各基準点に対応付けて設定し(S8)、各基準点から当該基準点に対応付けた各理想基準点への変位を補正ベクトルとして求める(S9,S10)。歪み検出画像の全画素について、それぞれ周囲に位置する4個の基準点の補正ベクトルを用いて内挿補間を行うことにより各画素ごとの補正ベクトルを求める(S12〜S15)。この補正ベクトルをTVカメラで撮像した画像に適用して画像の歪みを補正する。
(もっと読む)
撮像装置、撮像システム及び撮像方法
【課題】目標物体の高速検出及び形状抽出が可能な高フレームレート画像と、人やマシンが認識できる高画質な通常画像との両者を同時に取得できると共に、高フレームレート画像に基づき、高速制御用の制御用データを生成可能な撮像装置を提供する。
【解決手段】撮像システム3を、1回の通常露光期間に、センサセルアレイ56の全露光領域に対する通常露光時間の露光による画像を撮像すると共に、同じ1フレーム期間に、センサセルアレイ56の特定領域(露光領域の一部から構成)に対する複数種類の露光時間の露光による画像を撮像し、且つ特定領域の撮像画像データに基づき制御用データを生成する撮像装置1と、撮像装置1から通常露光時間の撮像画像データを取得し、当該撮像画像データを記録保持したり、その画像を表示したり、撮像装置1から取得した制御用データに基づき制御対象を制御したりするホストシステム2とを含んだ構成とした。
(もっと読む)
障害物衝突判断装置および障害物衝突警告システム
【課題】視界の悪い交差点における障害物の衝突判断を可能にする障害物衝突判断装置および障害物衝突警告システムの提供。
【解決手段】車両に搭載される装置であって、画像データから障害物と道路反射鏡とを検出する物体検出手段と、物体検出手段が検出した道路反射鏡の状態を認識する道路反射鏡状態認識手段と、物体検出手段が検出した障害物の状態を認識する障害物状態認識手段と、障害物状態認識手段の認識結果に基づいて障害物の接近を判断する接近判断手段とを備え、障害物状態認識手段は、道路反射鏡状態認識手段の認識結果をもとに、障害物の状態を認識するものであり、これによって、視界の悪い交差点における障害物の衝突を判断できる。
(もっと読む)
車両の向き検出装置
【課題】GPSアンテナを増設することなく、既存の車載用ナビゲーションシステムを用いて停車中の車両の指向方向を検出することができるようにする。
【解決手段】自動操縦により駐車スペース21に後進で駐車させる際の基準となる切返し点Pの位置座標、及びそのときの基準車両1前方を撮像したステレオ画像に基づき基準車両1から前方立体物の縦方向エッジw,uまでの距離Pw,Puを算出して記憶する。その後対象車両1’を切返し点Pを目標として停車させたときの実際の切返し点Qにおける位置座標、及びそのときの対象車両1’前方を撮像したステレオ画像に基づき縦方向エッジw,uまでの距離Qw,Quを算出し、各距離Pw,Pu,Qw,Quと両車両1,1’間の距離PQに基づき余弦定理及びベクトルの内積を用いて、車両1の指向方向に対する対象車両1’の指向方向の角度差θxを算出する。
(もっと読む)
顔姿勢検出方法
【課題】複雑な撮像系システムを必要とすることなく、効率的に顔姿勢の方向を検出すること。
【解決手段】この顔姿勢検出方法は、対象者Aの左右の瞳孔及び左右の鼻孔のうちの3つの組み合わせである第1基準部位群における部位間の距離を求める距離導出ステップと、1台のカメラ2によって対象者Aの顔画像を生成し、顔画像に基づいて顔画像上における第1基準部位群の2次元的位置を検出する位置検出ステップと、距離導出ステップにおいて求められた距離と、位置検出ステップにおいて検出された2次元的位置とに基づいて、第1基準部位群を含む平面の法線方向を算出することによって、対象者Aの顔姿勢を導出する姿勢導出ステップとを備える。
(もっと読む)
低解像度のグリフ・イメージから高忠実度のグリフ・プロトタイプを作成するための方法および装置
【課題】低解像度のグリフ・イメージから高忠実度のグリフ・プロトタイプを作成することを円滑にするシステムを提供すること。
【解決手段】システムは、フォントにおける文字の特徴的形状を特定し、それぞれが同一のグリフ・イメージの別個のインスタンスである複数のグリフ・イメージを受け取る。次に、システムは、所与のグリフ・イメージの黒さが、所与のグリフ・イメージの中における黒のピクセルの数である、それら複数のグリフ・イメージの平均の黒さを算出する。次に、それら複数のグリフ・イメージから複合グレースケール・グリフ・イメージを作成する。最後に、システムは、その複合グレースケール・グリフ・イメージから、それら複数のグリフ・イメージの平均の黒さと同一の黒さを有するモノクロ・グリフ・イメージを作成する。
(もっと読む)
底擦り回避補助装置
【課題】車両の底擦りの発生を事前に知ることができ、これを確実に回避することができるようにする。
【解決手段】地図データ入力部1から入力した自車両周辺の地図データからデータ抽出部2で地面形状データAを抽出し、データ取得部3で自車両周辺の特徴点の位置データBを取得する。また、カメラ部4で得られた自車両周辺の画像から、抽出部6と算出部7とにより、特徴点の位置データCを求める。そして、位置袷部8で特徴点の位置データB,Cを一致させる座標変換のパラメータを求め、このパラメータを用いて、座標変換部9により、地面形状データAを自車両の座標系の地面形状データDを求める。この地面形状データDと自車両形状データ入力部1からの自車両形状データを基に、底擦り判定部10で自車両が底擦りするか否かを判定し、この結果を出力部12に与える。
(もっと読む)
画像速度算出装置及び画像速度算出方法
【課題】画像上で画像速度算出対象が高速で移動する場合でも、画像速度の算出を可能にする。
【解決手段】マイコン3により、カメラ1により撮像された画像上にカメラ1の露光中に発生する画像の流れを判定し、判定された画像の流れに基づいてカメラ制御部4によりカメラ1の露光時間を変更し、変更されたカメラ1の露光時間に基づいて、画像速度を算出する。
(もっと読む)
画像合成装置
【課題】合成画像を生成する際の画質の劣化および圧縮率の低下を防止すること。
【解決手段】画象合成装置1004は、空間領域から基底関数の組により関数変換係数値で表されるデータに変換する関数変換および量子化された符号化画像データおよびそれぞれに対応する量子化テーブルと合成量子化テーブルとを入力する画像入力装置1001,1002および合成マップ入力装置1003と、入力された符号化画像データから複数の領域を抽出し、抽出された複数の領域を合成した合成量子化関数変換領域画像データを生成し、抽出された複数の領域それぞれの関数変換係数値を、該領域に対応する量子化テーブルおよび合成量子化テーブルに基づいて変換する合成関数変換係数データ作成処理部1014とを備える。
(もっと読む)
暗号化検出鍵を備えたマルチビット・フォレンジック透かし
本発明は、ホスト信号内のマルチビット・ペイロードの形式で補助データを埋め込む工程と、関連付けられた検出鍵を暗号化する工程とに関する。更に、本発明は、データ信号からのマルチビット・ペイロードの形式で補助データを抽出することに関する。補助データは、以下の工程でホスト信号に埋め込まれる。まず参照透かしが供給され、その後、参照透かしにのみ関連付けられた暗号化検出鍵が生成される。暗号化検出鍵は、透かしのスクランブルされたバージョンであり得る。更なる工程では、マルチビット透かしが生成され、マルチビット・ペイロードが参照透かしに符号化される。最後に、マルチビット透かしがホスト信号に埋め込まれる。  (もっと読む)
(もっと読む)
顔画像駆動装置、顔画像駆動装置用データ生成装置、及びコンピュータプログラム
【課題】 簡略かつ安価な方法でリアルタイムに顔画像アニメーションを生成するための装置及びアニメーション生成に使用するパラメータを生成するための装置を提供する。
【解決手段】 顔画像駆動装置用データ生成装置は、2つのカメラによって同時に撮像された顔画像に基づいて、顔画像の特徴点の3次元的な位置を算出する3次元的位置算出装置と、基準となる位置にいる被写体が存在している際の、被写体の9種類の表情の顔画像から算出される所定の特徴量の変動を説明する主成分ベクトルを準備する準備処理部200と、各フレームにおいて、3次元的位置算出装置を使用して計測された顔画像の特徴点の3次元的な位置から算出される特徴量を、準備処理部200により準備された主成分ベクトルの線形和で近似する係数系列を算出するフレームごとの処理部202とを含む。
(もっと読む)
多視点映像合成装置及び多視点映像合成システム
【課題】従来のものよりも、より高い臨場感を視聴者に与え、3次元空間における物体の動きの理解促進を図ることができる多視点映像合成装置及び多視点映像合成システムを提供すること。
【解決手段】多視点映像合成システム10は、複数のカメラ20と、映像記録装置26と、多視点映像合成装置30とを備え、多視点映像合成装置30は、ユーザが操作して情報を入出力するユーザインターフェース部31と、映像信号を選択するセレクタ部32と、カメラパラメータを算出するカメラパラメータ算出部33と、移動物体の画像座標を取得する画像座標取得部34と、移動物体の世界座標を算出する世界座標算出部35と、CGを合成するCG合成部36と、画像上の注視点を指定する注視点指定部37と、射影変換行列を生成する射影変換行列生成部38と、射影変換された画像を生成する変換画像生成部39とを備える。
(もっと読む)
ラベリング処理装置、ラベリング処理方法、ラベリング処理プログラム、および記録媒体
【課題】並列演算処理によりラベリング処理が高速化され、分割領域をまたがる連結領域の異なるラベル値を統一する特別処理を不要とするラベリング処理装置を実現する。
【解決手段】2次元の2値画像データ領域内で、連結領域に対してラベル付けを行うラベリング処理装置において、画素縦2行横m列または縦m行横2列(mは2以上の整数)で構成される、第1走査マスクから第(M−1)走査マスク(Mは2以上の整数)までの互いに異なる走査マスクの何れとも異なる、第M走査マスクを参照してラベル付けを行う第Mラベル演算処理手段までの、M個のラベル演算処理手段を備え、M個のラベル演算処理手段が、前記2値画像データ領域内の第(M×N)ライン(Nは0以上の整数)から第(M×N+M−1)ラインまでの各ラインに順に対応付けられ、かつM個のラベル演算処理手段のそれぞれが、各ライン上の画素のラベル付けを行う、M個のラベル付け処理を同時に行う。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】閲覧が制限されている領域を含む画像情報を処理することのできる画像処理装置を提案する。
【解決手段】レイヤ画像生成部102において入力画像から複数のレイヤを生成し、その中から、レイヤ選択部103で選択された、閲覧が制限されている領域を含むレイヤについて暗号処理部105において暗号化される。そして、画像符号化部106において、暗号化されたレイヤを含む、入力画像から生成されたレイヤが符号化され、データ保存部107に保存される。復号側では、暗号化レイヤの閲覧が制限されているユーザに対しては、暗号化レイヤが復号されずに符号化されたレイヤが復号され、表示される。このため、閲覧が制限されたユーザに対しては、暗号化された領域は秘匿され、暗号化されていない領域が表示される。
(もっと読む)
診断画像の自動的処理および評価のための方法およびシステム
診断画像の自動処理方法およびその処理された画像の評価方法は、コンピュータハードウェアで実行可能な画像処理ソフトウェアプログラムを実行してデジタル入力画像を処理することにより、画像化された身体領域の特定の部位が有する特徴をグラフィック形式および/または英数字形式で強調表示した修正デジタル出力画像を生成する。画像処理ソフトウェアプログラムは、ノンエキスパート画像処理アルゴリズムに基づいて、修正画像を出力する第1画像処理モジュールと、第1画像処理モジュールが出力した修正画像をさらに修正して、所定の特徴を有する画像オブジェクトのピクセルまたはボクセルが強調表示された画像ファイルを出力する、分類・予測アルゴリズムなどのエキスパート画像処理アルゴリズムに基づいた、第2画像処理モジュールとしての分類・評価モジュールと、を備えている。 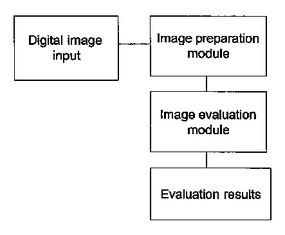 (もっと読む)
(もっと読む)
情報ベースの遠隔透かし検出システム
副情報を利用した情報ベースのセキュアな遠隔透かし検出のシステム及び方法。概略を述べれば、システムは、遠隔検出器及びサーバ・コンピュータ・システムを有し、データ信号の特定の記述子に副情報が割り当てられたデータベースが、サーバ・コンピュータ・システムにおいて記憶され、データ信号の透かしを識別することを意図している遠隔検出器は、データ信号の記述子を導出し、その後、信頼できるサーバ・コンピュータ・システムに連絡して、情報ベースの透かし検出に必要な副情報を得る。
 (もっと読む)
(もっと読む)
処理モジュールの電子透かし入れ
本発明は、処理モジュール(105)に電子透かしを入れる方法に関するものであり、この処理モジュール(105)は、電子信号を処理し、これにより処理信号を形成するように構成され、この方法は、この処理信号に大幅な変化を生じさせるように構成された第1関数演算子(104)を適用するステップを具え、この第1演算子(104)は上記処理モジュール(105)に組み込まれ、さらに、この第1演算子(104)と協働してこの変化を相殺するように構成された第2関数演算子(109)を配置するステップを具えている。第2演算子(109)は、上記処理モジュール(105)用の電子透かしとして働く抽出可能な識別子として作用するように構成されている。この方法の利点は、上記第1及び第2演算子が関数処理ブロックとして実現されるので、従来のデバッグツールを用いて処理モジュールを攻撃することはできない、ということにある。  (もっと読む)
(もっと読む)
任意分解能変更サイズ縮小デコーダ
任意分解能変更サイズ縮小復号化について説明されている。一態様では、符号化ビットストリームが受信される。符号化ビットストリームは、DCT領域復号化ループで縮小され、縮小データを生成する。  (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】 地紋印刷のデータ生成において、地紋画像が圧縮によって劣化しないようにすることを特別のメモリやデータバスを設けることなく実現することを可能とする。
【解決手段】 属性データ504の8ビットのうちの1ビットを地紋画像データ501に置換する。このように属性データの一部が地紋画像で置き換えられ、この属性データはエンコーダにより可逆圧縮される。これにより、地紋画像は、その印刷データ生成の過程で圧縮処理が行われても、属性データとともに可逆圧縮が行われるので、それを伸張したときの再現性が損なわれることはない。
(もっと読む)
81 - 100 / 125
[ Back to top ]