
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
10,521 - 10,540 / 10,652
管状構造を視覚化する方法及び装置
本発明は、オブジェクトの管状構造を、このオブジェクト3D画像データセットを使用することにより視覚化する方法及び対応する装置に関する。より効果的且つ実例的な視覚化を提供するために、前記管状構造の象徴的な経路ビュー(B)からCPRビュー(C)を生成及び視覚化するステップであり、前記象徴的な経路ビュー(B)は前記管状構造を示し、前記象徴的な経路の経路ポイントは3D空間位置データを割り当てられるステップ、及び前記CPRビュー(C)又は前記象徴的な経路ビュー(B)において選択された前記管状構造のビューイングポイント(V)を介して、前記オブジェクト(1)の少なくとも1つの平面ビュー(O)を生成及び視覚化するステップを有する方法が提案されている。 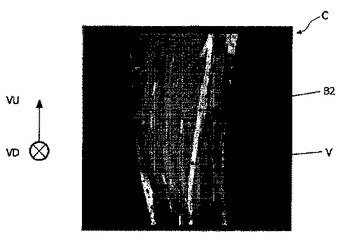 (もっと読む)
(もっと読む)
画像のノイズを除去するための変換
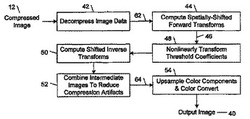
【課題】画像のノイズを除去するシステム及び方法を提供する。
【解決手段】一態様では、入力画像(62)の空間シフトされたフォワード変換が計算される。各フォワード変換は、関連した転置行列Z'を有するディノイザ変換Zに基づいて計算され、ZとZ'との間の行列乗算は、対角行列Λを生成し、Z=F(D)であり、Fは、Dの係数からZの係数へのマッピングを特定し、Dは、実質的に周波数領域の変換に対応する。フォワード変換は、入力画像(62)にリンクされた量子化値から導出される非線形マッピングに基づいてノイズを除去される。ノイズを除去されたフォワード変換の空間シフトされた逆変換が計算される。各逆変換は、Z及びZ'に基づいて計算される。出力画像(40)が、空間シフトされた逆変換の組み合わせに基づいて計算される。
(もっと読む)
小型システム用のパノラマメーカーエンジン

パノラマ画像を生成するための方法は、第1画像を受け取る段階と、第1画像を第1部分と第2部分に分割する段階と、第1画像の第1部分を回転させる段階と、第1画像の回転した第1部分を不揮発性メモリに保存する段階と、第2画像を受け取る段階と、第2画像を第3部分と第4部分に分割する段階と、第1画像の第2部分と第2画像の第3部分との間の重複領域を突き合わせる段階と、第1画像の第2部分と第2画像の第3部分を縫合して、第1縫合画像を形成する段階と、第1縫合画像を回転させる段階と、第1縫合画像を不揮発性メモリに保存する段階と、を含んでいる。 (もっと読む)
画像歪み補正プログラム,画像歪み補正装置,画像歪み補正方法並びに画像歪み補正プログラムを格納した記録媒体
画像撮像装置により紙面を撮像した画像から、紙面内容を手がかりとして、紙面曲面上で互いに平行であった測地線の射影集合を抽出すると共に、測地線の射影集合から紙面曲面に該当する線織面を形成する線織線の射影集合を抽出する。そして、測地線及び線織線の射影集合から紙面曲面を推定し、その紙面曲面に基づいて画像の歪みを補正する。このようにすれば、多様な歪みの種類に対応可能となると共に、画像に紙面の一部しか表れていないときであっても歪み補正を行うことができる。 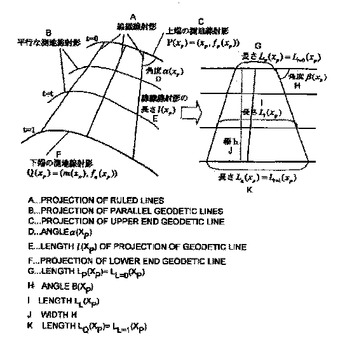 (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
補正方法
【課題】ダスト、スクラッチ及び他の光学的なブレミッシュを自動的に検出し、補正できる好適な画像補正方法を提供する。
【解決手段】光学システムに含まれるデジタル取得装置によって取得された画像内のダスト人工物領域を自動補正する補正方法であって、前記デジタル取得装置で取得する一つ以上の原画像デジタル取得ステップと、複数の画素が前記一つ以上のデジタル取得画像の中のダスト人工物領域に一致する確率を決定するステップと、一つ以上の画像が取得されたとき前記光学システムの関連する一つ以上の抽出されたパラメータとダスト人工物領域を結びつけるステップと、前記ダスト人工物確率決定と前記結びつけに基づき描かれたダスト領域を含んでいる統計的なダストマップを形成するステップと、前記結び付けられた統計的なダストマップに基づき、前記一つ以上の各原画像の中のダスト人工物領域に一致する画素を補正するステップとを有することを特徴とする補正方法。
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
画像処理方法および装置
【課題】被写体の見えを忠実に再現可能な、またはさらに好ましい色再現が可能な画像処理方法および装置、これを用いる画像出力装置およびデジタルカメラならびに画像処理方法を実施するプログラムおよび記録媒体を提供する。
【解決手段】被写体を撮影して被写体画像の測色値を取得し、被写体を照明する光源の色度情報および照度情報を取得し、被写体画像の測色値に対して、色度情報および照度情報から色順応補正を、照度情報からコントラスト補正を行い、被写体画像を出力する際のフレア量から、出力すべき三刺激値としての補正済測色値を補正することにより、あるいは、色順応補正の前に、光源の照明色に対して定まる順応度より高い順応度に設定した場合の色度値をもとに被写体画像の測色値に対してコントラスト変換および彩度変換の少なくとも一方を行うことにより、上記課題を解決する。
(もっと読む)
ディジタル信号における電子透かしの検出
電子透かし検出器はバッファを持ち、該バッファにおいて幾つかの画像タイルがフォールドされ蓄積され、その後にバッファの内容と探索されている電子透かしパターンとの間の相関が算出される。フォールド及び蓄積処理の目的は、ビデオコンテンツを平均化し、埋め込まれた電子透かしエネルギーを蓄積することである。このことは、DIVX(登録商標)のような、多くの人工的なノイズ及び不要な類似性(ブロックパターン)を呈する大きく圧縮されたビデオにはもはや適切でない。その結果、相関ピークがしばしば閾値を下回る。同様に、圧縮がスケーリング検出にも影響を与える。本発明によれば、大きく圧縮されていない、それ故十分な電子透かしエネルギーを担持する高い可能性を持つフレーム(又はその一部)のみがフォールドされ蓄積される。この目的のため、データの圧縮の度合いを示す品質メトリックが算出される。品質メトリックは、圧縮されたデータ自体に基づいて算出されても良いし、又は伸張されたベースバンドデータから導出されても良い。有利な例は、(残余)フレームの非ゼロDCT係数の数である。次いで、該フレーム(又はその一部)が電子透かしデコード処理から除外されるべきか否かの決定が為される。品質メトリックはまた、スケーリング検出処理における利用のためのデータを選択するために利用されても良い。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 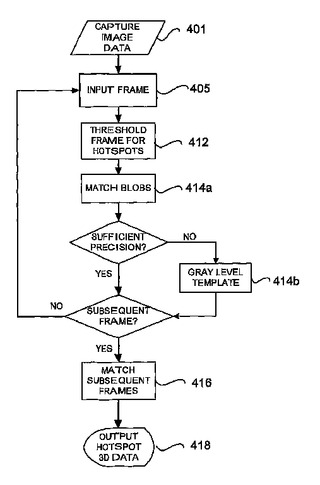 (もっと読む)
(もっと読む)
カラー印刷プリントエンジンを校正するための方法及び装置
印刷エンジン用の校正方法が開示される。好ましい実施例では、その方法は、基準カラーの第1のアレイを上に持つ校正チャート(100)を備えるステップと、ステップ301で前記印刷エンジンから個別のテストシート(102)を印刷するステップと、両シート(101,102)を整列するステップと、基準およびテストのカラーのデジタル画像を取り込むために、ステップ302でシート(101,102)をスキャンし、基準およびテストのカラーの対応する対の間の色差を得るために、ステップ303で色特性を解析するステップと、および、色差に基づき、プリンタを自動的に調整することにより、ステップ304でいずれかの色差を補償するステップとを備え、前記テストシート(102)は、その上にカストカラーの第2のアレイを有し、各テストカラーは、第1のアレイの1つの基準カラーに対応する。
 (もっと読む)
(もっと読む)
自動顕微鏡スライド組織サンプルマッピング及び画像取得
この方法は、組織サンプルセットの画像を受け入れる工程(620)を備える。少なくとも1つの他の組織サンプルに対する各組織サンプルの画像中の位置は、電子的に識別される(640)。各組織サンプルは、組織サンプル位置の識別に基づいて電子的に識別される(660)。 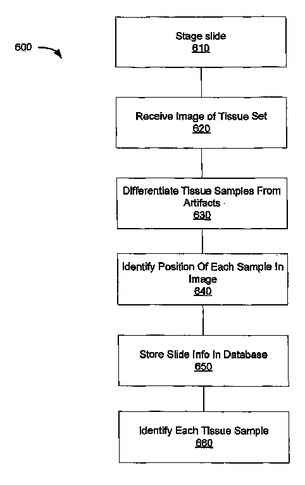 (もっと読む)
(もっと読む)
長方形状動き検索
長方形状動き検索のための方法が開示される。当該方法のある実施形態は、長方形の検索領域をなす複数の動き検索点に対して動き測定を実行し、前記動き測定の結果に基づいて動き検索点のうちで最小動き検索点を見出し、該最小動き検索点が当該長方形検索領域の内部領域にあれば当該ピクセルブロックの第一のビデオフレームから第二のビデオフレームへの相対的な移動に対応する動きベクトルを見出すことを含む。
 (もっと読む)
(もっと読む)
デジタル画像におけるテキスト状エッジの強調
デジタル画像においてテキスト状エッジを強調するシステム及び方法が説明される。一態様では、画像ピクセルのブロック(27)のピクセルが第1のピクセルクラス(29)及び第2のピクセルクラス(31)にセグメント化される。第1のクラス(29)及び第2のクラス(31)の強度分布をそれぞれ表す強度値を分離する距離の測度に基づいて、且つ第1のピクセルクラス(29)及び第2のピクセルクラス(31)の両方に対して計算された強度ヒストグラムの尖りの測度に基づいて、ピクセルブロック(27)が少なくとも1つのテキスト状エッジを含む可能性が高いという判断に応じて、このピクセルブロック(27)がエッジ強調される。 (もっと読む)
事前に計算されたサンプルをモザイキングすることでフィルムグレインをシミュレートするための方法
フィルムグレインは、事前に確立されたブロックのプールからフィルムグレイン408の事前に確立されたブロックを使用して出力画像19においてシミュレートされる。連続するフィルムグレインブロックは、到来する画像におけるM×N画素のセットの連続する1つの平均強度にプールからのブロックの平均強度を整合させることで選択される。ひとたび画像からの全ての連続する画素ブロックが選択されたフィルムグレインブロックに整合されると、選択されたフィルムグレインブロックは「モザイクされ」、すなわち到来する画像にマッピングされるより大きな画像に分解される。  (もっと読む)
(もっと読む)
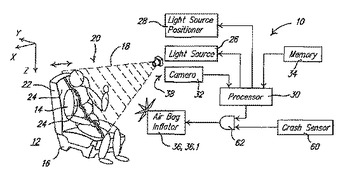
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
画像処理方法、画像処理システムおよび画像処理プログラム
【課題】 従来の画像高画質化方法では、画像全体の性質に応じて高画質化を実行するため、性質の異なる対象が混合して含まれている画像については、適切な高画質化を行なうことができなかった。
【解決手段】 画像中から顔、空・雲等の領域を認識する処理により、その領域らしさを計算し、その領域らしさに従い、画像領域向きの画像処理を行なうことにより、画像中の対象に応じた高画質化処理を実行する。
(もっと読む)
電子画像蓄積方法、電子画像蓄積装置、及び電子画像蓄積システム
電子画像蓄積方法は、顔画像登録フェーズ及び画像整理フェーズを有する。前記顔画像登録フェーズは、登録画像が入力されるステップと、前記登録画像中の顔画像の顔の特徴量を求めるステップと、前記特徴量を登録顔画像として記憶するステップとを含む。前記画像整理フェーズは、整理対象画像が入力されるステップと、前記整理対象画像中の顔画像の顔の特徴量を求めるステップと、前記求めた整理対象画像中の顔の特徴量に該当する特徴量の顔を前記登録顔画像から検出するステップと、前記整理対象画像と前記検出した登録顔画像とを関連付けるステップとを含む。 (もっと読む)
試料の面積またはコンフルエンスを決定するための方法と装置
試料の面積またはコンフルエンスは、試料と試料の周りのバックグラウンドに関する定量的位相データを得ることにより決定される。試料の境界は、位相データ測定値のヒストグラムを作成し、ヒストグラムの導関数を取って、それにより最大スロープの点を決定することにより、定量的位相データから決定される。境界に適用可能なデータ値を求めるために、既定のデータ値を上回るか下回るデータ値は試料内にあると見なすように導関数上の最もよく適合する線が使用される。 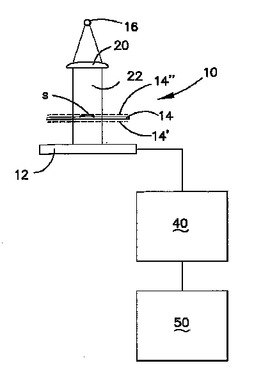 (もっと読む)
(もっと読む)
複数のイメージセンサ間における視野関係を決定するためのコンピュータ化された方法及び装置
第1の光景を表す複数の第1のビデオフレームについての第1のイメージデータを受容する(図5の502)ことを含むコンピュータ化されたイメージ解析方法。第1のビデオフレームの各々(図1の102(1))が複数のイメージ領域から構成され、少なくとも1つの第1のビデオフレームの1つのイメージ領域内に第1のオブジェクトが存在する。第2の光景を表す複数の第2のビデオフレームについての第2のイメージデータ(図1の102(2))が受容される。第2のビデオフレームの各々が複数のイメージ領域(図5の504)を含み、少なくとも1つの第2のビデオフレームの1つのイメージ領域内に第2のオブジェクトが存在する。本方法はまた、第1のイメージ領域内に存在する第1のオブジェクトの発生と第2のイメージ領域内に存在する第2のオブジェクトの発生との間の確率的な相関関係に基づいて、第1のイメージ領域と第2のイメージ領域との間の関係を決定する(図5の510〜512)。 (もっと読む)
10,521 - 10,540 / 10,652
[ Back to top ]