
Fターム[5C084DD36]の内容
Fターム[5C084DD36]に分類される特許
41 - 60 / 73
警備システム

【課題】レーザの照射によって設定した監視エリア内で検出した物体の位置および住人に予測される行動から住人と不審者とを区別して警備する警備システムを提供する。
【解決手段】警備システムは、初期設定処理として監視エリアAの設定を行うとともに、監視エリアA内に許可エリアPを設定している。許可エリアPは、門18から家屋11の玄関19までのように住人の動線に応じて設定されている。この許可エリアPに住人が侵入しても、原則として警報処理は実行されない。一方、許可エリアPであっても、許可エリアP内に長期間滞留している場合、侵入した物体は不審者であることが考えられる。そのため、侵入した物体が許可エリアP内で検出された場合でも、許可エリアP内の滞留時間が長いときは、不審者の侵入と判断して警報処理を実行する。したがって、監視エリア内で検出した物体の滞留時間に基づいて住人と不審者とを区別して警備される。
(もっと読む)
屋外警備システム

【課題】走査している領域のうち監視の対象となる領域を絞り込んで追跡することにより、処理の高速化と物体の高精度な識別とを両立する屋外警備システムを提供する。
【解決手段】処理部22は、警戒領域Aと外部との境界に形成される境界面Pa〜Peを不審な物体が横切った際に、その物体が検出された位置に基づいて物体の種類を判断する。そして、判断の結果、その物体が不審者であると判断されたとき、検出された位置を含む周囲に領域内監視走査領域Cを設定し、この領域内監視走査領域Cにおいて物体を追跡する。そのため、走査している警戒領域Aから監視の対象となる領域内監視走査領域Cが絞り込まれる。この絞り込まれた領域内監視走査領域Cを不審者の移動に応じて更新しつつ不審者を追跡することにより、処理の高速化と物体の高精度な識別とを両立することができる。
(もっと読む)
積荷監視方法及びそのための積荷監視システム
【課題】本発明の目的は、輸送中の積荷の動きを監視し、積荷の荷崩れや荷擦れの発生のおそれがあるときに通知し、さらに、積荷の盗難を通知することができる積荷監視方法及び積荷監視システムを提供することである。
【解決手段】本発明に係る積荷監視方法は、車両の荷物室内に設置したレーザ式測域センサ11a,11bによって積荷との距離を測定して距離情報40の信号を送信し、距離情報40を位置演算装置13によって情報処理を行い積荷の位置情報41を送信し、車両走行センサ17によって車両走行情報42を送信し、車両走行情報42及び位置情報41を、積荷挙動分析装置15によって分析し、車両走行中に前記積荷が予め設定した大きさ以上の揺れを生じたときに、積荷異常警報信号44を送信し、車両停止中に前記積荷が移動したときに、積荷盗難警報信号45を送信することを特徴とする。
(もっと読む)
監視装置及び監視システム
【課題】センサの検知時に、侵入者等の侵入物体に対してカメラを旋回して被写体を捉えるシステムであるが、カメラの旋回やズームに一定の時間を要するため、即座に侵入者を捉えることが困難であった。
【解決手段】侵入した人物の位置を検知する複数のセンサと、該センサによって検知された侵入した人物の位置に対して、上記制御部の制御に基づいて視野角を変更するカメラと、複数のプリセット位置を予め登録し上記複数のセンサから出力された位置座標に基づいて上記侵入した人物の移動予測を行い、かつ侵入した人物の移動方向から侵入した人物の顔の向きを算出し、前もって上記カメラの視野角を変更して追尾する制御部とを備えた。
(もっと読む)
侵入監視システム
【課題】侵入者を監視するための侵入監視センサーが複数設置された侵入監視システムにおいても、従来はセンサーとセンサーとの間の直線上の1点のみで監視するものである。このために、侵入した詳細な位置まで把握できていなかった。本発明は、侵入物体が侵入してきたときに、侵入箇所を迅速かつ正確に特定できる侵入監視システムを提供する。
【解決手段】侵入監視システムは、エリア又は周囲を検知できるエリアセンサー10、11、12を有する侵入監視システムにおいて、エリアセンサー10、11、12を予め列状又は線状に配置し、このエリアセンサー10、11、12の検知範囲Y内に侵入した侵入物体5の侵入位置を特定できるように構成されている。
(もっと読む)
車両セキュリティシステム
【課題】車両の加入状況や通信能力に応じて変動するセキュリティレベルに関する情報をユーザーに提供すること。
【解決手段】ネットワークに加入している複数の車両間の通信によって該複数の車両が互いを監視し合う車両セキュリティシステム(1)であって、前記ネットワークに加入している各車両の有する能力計数を集計し、位置に対応するセキュリティレベルを算出するセキュリティレベル算出手段(104)を備え、該セキュリティレベル算出手段により算出された位置に対応するセキュリティレベルをユーザーに提供することを特徴とする。
(もっと読む)
レーザエリアセンサ
【課題】屋外での悪天候時などにレーザ光が受ける悪影響などをできる限り排除し、設置場所や気象条件などに関わらず侵入者などの適確な検知を行うとともに誤検知を極力防止することができるレーザエリアセンサを提供する。
【解決手段】物体までの距離と反射光の受光レベルを取得するレーザ距離計110と、測定方向を変える走査機構部120と、測定方向を変えながら測定を周期的に行う情報取得部130と、取得された距離情報および受光レベル情報を前後の測定周期と方向毎に比較して不連続変化に対応する箇所の距離情報を除去するとともに非対応箇所の受光レベル情報を補正する情報補正部135と、補正された距離情報の中から人体に対応すると推測される部分を抽出して時系列での移動状況に基づいて人体であるか否かを判定する人体判定部140と、人体検知信号を出力する人体検知信号出力部150とを備える。
(もっと読む)
対象検出装置、対象検出方法、および対象検出プログラム
【課題】レーザセンサを用いた対象検出技術において、広い検出範囲を維持したまま、誤検出を減らす。
【解決手段】対象検出方法は、レーザ投受光部の取付位置から斜め下方にレーザビームを発射することで対象を検出するための方法であって、レーザ投受光部から被検出物までの距離情報を取得する距離情報取ステップと、被検出物がレーザ投受光部側に接近してくる際に被検出物の追跡が途切れたか否かを判定可能である追跡消滅判定ステップと、被検出物の追跡が途切れた場合に、被検出物の追跡が途切れる直前の距離情報に基づいて、被検出物が対象であるか又は非対象であるかを判定する対象判定ステップとを備えている。
(もっと読む)
レーザエリアセンサ
【課題】実際の設置場所や警戒目的などに合わせて誤検知を極力防止できる適切な警戒領域を簡単に設定できるとともに、さらに任意の警戒領域を容易に設定可能なレーザエリアセンサを提供する。
【解決手段】レーザ距離計110と、その測定方向を変えるスキャン機構120と、測定方向を変えながらレーザ距離計110による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離データ取得部130と、その距離情報の中から人体に対応すると推測される部分を抽出するとともに、抽出部分の時系列での移動状況に基づいて人体であるか否かを判定する人体判定部140と、警告出力制御部150と、メモリ160と、DIPスイッチ170とを備える。
(もっと読む)
レーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法
【課題】侵入者の存在有無および侵入者の位置を正確に把握することができるレーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法が開示される。
【解決手段】レーザ距離測定機を用いた保安システムは、レーザ光を放出して反射して戻ってきたレーザ光を受信して目標物との距離を測定し、侵入者の存在有無および侵入者の位置を検出するレーザ距離測定機と、放出されたレーザ光をレーザ距離測定機に反射する少なくとも1つの反射手段とを備え、少なくとも1つの反射手段は、レーザ距離測定機から所定の距離離隔した位置でレーザ距離測定機の誤差距離だけ離隔して設置されることを特徴とする。したがって、レーザ距離測定機の誤差距離を考慮して反射手段を設置することで、侵入者の存在有無および侵入者の位置を正確に把握することができる。
(もっと読む)
監視装置
【課題】監視装置全体としての検知精度を向上させることのできる監視装置を得る。
【解決手段】電波応用位置検出センサ1は、第一検知範囲101内の監視対象100の位置を推測し、第一可能性分布として出力する。第二のセンサ4は、第二検知範囲102内の監視対象100の位置を推測し、第二可能性分布として出力する。分布演算手段5は、これらセンサによって求められた監視対象100の位置における可能性分布に基づいて、これら可能性分布を統合した統合可能性分布を出力する。情報提示手段6は統合可能性分布を監視対象100の最も確からしい位置の情報として出力する。
(もっと読む)
移動体検知装置、警備ロボット、移動体検知方法および移動体検知プログラム
【課題】装置自体が移動している際に移動体を検知することができる移動体検知装置、警備ロボット、移動体検知方法および移動体検知プログラムを提供する。
【解決手段】移動可能な警備ロボット100において、レーザレンジセンサ101は、移動中に、障害物までの座標を検知し、走行情報計測部107は、当該警備ロボット100が走行した方向および距離を示す走行情報を計測し、座標算出部105は、座標記憶部110に記憶された警備ロボット100が移動する移動領域における前回検知された障害物の座標と、走行情報計測部107によって計測された走行情報とから、今回検知されるべき障害物の座標を算出し、移動体判定部106は、レーザレンジセンサ101によって検知された座標と、座標算出部105によって算出された座標との差分から移動体を判定する。
(もっと読む)
侵入者検知システム
侵入者検知システムは、変調信号によって変調された被変調光信号で視野を照明する照明手段と、遅延反射信号を受信する光受信器と、変調信号と受信された遅延反射信号との間で相互相関関数を計算する相互相関器と、侵入者検知を行うため使用される相互相関関数の変化を検知する手段と、を備える。本システムは、侵入者検知信号が取得されるようにする光センシングおよび相互相関計算を使用する。これは、侵入者を検知するため固体、低コストかつ高信頼性のセンサを提供することを可能にさせる。 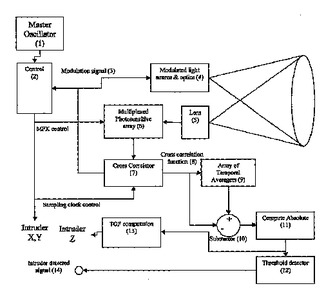 (もっと読む)
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
物体検知自動追尾装置
【課題】 従来の監視カメラは、往復首振りするものであって、視界から外れた方向を撮影できないものや、物体の移動に追随できないものが主流であった。
【解決手段】 本発明の物体検知自動追尾装置は、検知範囲内の物体を検知可能な検知用センサと停止用センサを備え、検知用センサがその検知範囲内で物体を検知すると、停止用センサが検知用センサの検知方向へ回転し、前記回転した停止用センサは物体を検知すると、回転を停止し、物体が移動して停止用センサの検知範囲から外れると、その物体を検知用センサで検知し、それに伴って停止用センサが前記検知方向へ回転して、前記移動物体を追尾できるようにしたものである。また、停止用センサの周囲に一又は二以上の検知用センサを配置した。検知用センサ及び停止用センサの回転範囲を規制する回転規制部を設けた。監視カメラ又は/及び警報装置を設け、検知用センサ及び停止用センサの作動と連動させた。
(もっと読む)
自動監視警告システム
【課題】監視カメラによって侵入物体の動きを追尾し、侵入物体に向けた退去警告を出し、発射指令に基づいて又は自動で侵入物体に対してマーキングボール等の弾を発射する自動監視警告システムを提供する。
【解決手段】被監視場所と監視センターとを通信回線70で接続し、被監視場所には、侵入物体を感知するセンサ類10と、センサ類10に対応して設けられる監視手段20と、監視手段20から得られる画像信号を監視センターへ送信する画像送信手段30と、監視手段20及び画像送信手段30を制御するコントロール手段40とを備え、センサ類10が侵入物体を感知した際に侵入物体に向けて旋回追尾できるように旋回装置50を設け、監視手段20に対応して設けられる弾発射装置60を備え、弾発射装置60の弾発射照準を侵入物体に自動的に合わせ、侵入物体に向けた退去警告後に発射指令に基づいて又は自動で侵入物体に対して弾を発射する。
(もっと読む)
盗難監視システム
【課題】ループ状の光ファイバーを監視対象物品を補足するように取り付け、該光ファイバーに伝播する光の有無を検出することにより、比較的簡単な設備により確実に盗難を監視することができる盗難監視システムを提供する。
【解決手段】この監視制御部8は、光ファイバー17の往路ファイバー6の端部から光を入射させる光源(発光手段)12と、光ファイバー17を伝播した光を復路ファイバー5の端部から受光するフォトセンサ(受光手段)14と、フォトセンサ14の信号を増幅するアンプ16と、アンプ16のレベルを監視する制御部15と、光源12から入射された光を分岐する光分岐器9と、復路ファイバー5の端部からから入射して光を分岐する光分岐器11と、光分岐器9からの光をフォトセンサ14に入射するバイパス回路(バイパス手段)10とを備えて構成される。
(もっと読む)
移動ロボット
【課題】坂道、金網等での消失物体の誤判定を防いで、異常検出能力を向上する。
【解決手段】検出部11は、移動ロボット1が所定環境内を走行したときに環境内を走査して被測定物の位置情報を検出する。記憶部15は、過去の走行の際の複数回の走査で毎回被測定物が検出された位置のみを既存物の存在位置として表す消失判定用の環境地図を記憶する。異常判定部13は、現在の走行にて、消失判定用の環境地図における既存物の存在位置に被測定物が検出されなかったときに既存物が消失する消失異常が発生したと判定する。
(もっと読む)
監視システム、同システムを構成する移動ロボットおよび制御装置
【課題】監視室が無人の場合でも移動ロボットを用いた監視を可能とし、また、監視室が無人の時の移動ロボットの不用意な移動を防止して安全性を向上する。
【解決手段】制御装置3は、移動ロボット2および遠隔の監視センタ5と通信を行う。制御装置3は、警備装置4の警備状態が警備になったことを判定すると、移動ロボット2に施設警備信号を送信して、移動ロボット2を所定の画像監視位置へ移動させる。そして、制御装置3は、移動ロボット2が画像監視位置から送ってくる撮影画像を監視センタ5へと送信する。
(もっと読む)
侵入検知装置
【課題】レーザの反射光を用いて距離画像を形成する侵入検知装置において、背景距離画像と現在の距離画像とのいずれか一方で測距不能となった画素は距離変化を検知できず、侵入者の検出漏れを生じやすい。
【解決手段】距離算出部16は、レーザ反射光に基づいて物体までの距離計測値を求める。測距可否データ生成部32は、距離画像の各画素について、距離算出部16による測距の成否を表す測距可否データを生成する。背景差分算出部22は、背景距離画像及び現在の距離画像それぞれの測距可否データを参照し、両距離画像にて得られた距離計測値の変化が所定値以上である場合だけでなく、両距離画像の一方のみにて距離計測値が得られず測距不能である画素も変化画素として抽出する。侵入者判定部24は、変化画素に基づいて監視空間における侵入物体の有無を判定する。
(もっと読む)
41 - 60 / 73
[ Back to top ]