
Fターム[5C122EA32]の内容
Fターム[5C122EA32]に分類される特許
1 - 20 / 95
画像補正装置および画像補正方法
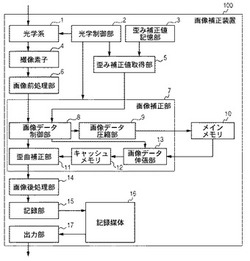
【課題】光学歪み補正の補正率を高める技術を提供する。
【解決手段】画像データ圧縮部9は、ズーム機能を有する光学レンズを介して撮像された画像データを圧縮し、圧縮画像データとしてメモリ10に格納する。歪曲補正部11は、画像データに生じている光学歪みを補正する。画像データ伸張部13は、メモリ10に格納された圧縮画像データを伸張し、歪曲補正部11に補正させる。ここで画像データ圧縮部9は、撮像時の前記光学レンズのズーム値をもとに、メモリ10の容量におさまるように前記撮像された画像データを圧縮する。
(もっと読む)
撮像装置および撮像方法

【課題】データ容量が大幅に増大することなく書籍画像の湾曲歪を補正し歪の少ない画像が取得でき、且つ、ポータビリティに優れ、小型で低コストである撮像装置および撮像方法を提供すること。
【解決手段】撮像素子11と、該撮像素子11に被写体の像を結像させる撮影レンズ系2と、前記撮像素子11の信号から画像データを生成する画像生成手段12と、前記画像データを記録する記録手段と、前記被写体の距離を二次元方向で多点測距し測距データを取得する測距手段3と、前記被写体として書籍を撮影する書籍撮影モードが設定可能な撮影モード選択手段と、前記書籍撮影モードが選択されて得られた画像データを、前記測距手段3により取得した測距データに基づいて湾曲歪を補正する制御手段14と、を備えることを特徴とする。
(もっと読む)
撮像装置及び画像補正方法
【課題】撮像素子と、光学系との相対的な位置ズレや回転ズレを低コストに補正可能な歪み補正方法、及び撮像装置を提供する。
【解決手段】画像データを取得する撮像部及び入射光を撮像部に結像する光学系により取得された画像データを処理する画像処理部20と、書き換え可能な不揮発性メモリ30と、を備え、少なくとも撮像部と光学系との位置ズレ及び/又は回転ズレを補正する画像補正部21を備え、不揮発性メモリ30は、画像処理部21によって実行される補正動作を行うための処理パラメータ32を格納しており、画像補正部21は、少なくとも撮像部と光学系との位置ズレ及び/又は回転ズレを、この処理パラメータ32に基づいて補正する。
(もっと読む)
ズームレンズおよび撮像装置
【課題】 広画角、高い変倍比、そして収差等が少なく高い解像力を実現し、小型で且つ高性能とする。
【解決手段】 物体側から、順次、負の第1レンズ群G1と、絞りADと、正の第2レンズ群G2と、正の第3レンズ群G3とを配置する。第1レンズ群G1は、物体側から、順次、負レンズL1と、正レンズL2とを配置し、第2レンズ群G2は、物体側から、順次、正レンズL3と、正レンズL4と、負レンズL5と、正レンズL6とを配置し、第3レンズ群G3は、正レンズL7を有して構成する。第1レンズ群G1の負レンズL1のd線におけるアッベ数νd1n、第1レンズ群G1の正レンズL2のd線におけるアッベ数νd1p、広角端における全系の焦点距離fw、望遠端における全系の焦点距離ft、および広角端における半画角ωwが、
〔1〕 40>νd1n−νd1p>23
〔2〕 7>ft/fw>4
〔3〕 ωw>38deg
を満足する。
(もっと読む)
画像処理装置、画像処理方法、及び撮像装置
【課題】オンザフライで歪み補正処理を行う際に必要となるラインメモリのメモリ容量を低減する。
【解決手段】画像処理装置は、レンズを介して撮像された原画像データの内、所定の水平ライン数分の画像データを、水平方向に垂直に分割して保持するラインメモリ22と、分割された画像データが保持されるラインメモリ22のそれぞれのメモリ領域ごとに、歪み補正対象となる原画像データに対して歪み補正処理を行う画像歪み補正部20と、を備える。
(もっと読む)
撮像装置及びその制御方法
【課題】中央処理装置(CPU)にかかる負荷を低減しつつ各種収差の光学補正を高効率で実現することができる撮像装置を提供する。
【解決手段】撮像装置は、周辺光量落ち補正部6を制御する光量落ち補正制御部7と、倍率色収差を補正する倍率色収差補正部8と、倍率色収差補正部8を制御する倍率色収差補正制御部9と、歪曲収差を補正する歪曲収差補正部10と、歪曲収差補正部10を制御する歪曲収差補正制御部11と、光量落ち補正制御部7、倍率色収差補正制御部9、及び歪曲収差補正制御部11を調停する光学補正調停部12とを備える。光学補正調停部12は、収差補正処理に必要な時間が収差補正処理に割り当てられる時間より長いときは、光学補正調停部12は、収差補正処理に優先順位を付ける。
(もっと読む)
単焦点光学系、撮像装置およびデジタル機器
【課題】本発明は、従来より、小型化、高性能化を図りつつ、他の仕様や生産性に影響を与えず、かつ近年量産工程で問題となる付着ゴミへの対応を解決し得る単焦点光学系を提供する。
【解決手段】本発明の単焦点光学系A1は、対角線長2Y’の撮像素子16の受光面上に物体の光学像を形成し、物体側より順に物体側面が凸面の第1正レンズ111と非球面を含み像側面が凹面の第2負レンズ112とから成る第1群11、非球面を有する第3レンズ121から成る第2群12像面側が凸面の第4正レンズ131と変曲点を持つ非球面を有する像側面が凹面の第5負レンズ132とから成る第3群13から構成され、第1および第3群11、13は像面に対して固定され、第2群12で合焦し、第1レンズ111の物体側に光学絞り14を有する単焦点光学系A1であって、20<|Δv1|<70、0.1<T23/TL<0.4および0.541<Y’/TL<0.9を満たす。
(もっと読む)
撮像装置
【課題】光軸に対して斜めに傾いた撮影面を撮影する場合であっても歪曲収差や台形歪み等が良好に補正された像を取得する。
【解決手段】撮像装置を、光源LSと、指Fが接する撮影面2にて光源LSからの光を全反射するように構成されたプリズムPと、撮影面2に接する指Fの像を形成する結像光学系LUとを有して構成する。結像光学系LUは、撮影面2に対して傾斜した光軸を有する前側レンズ群と、前側レンズ群よりも像面側にあって、前側レンズ群の光軸に対して平行偏芯した光軸上に配置された後側レンズ群と、前側レンズ群の光軸に対して垂直な面から傾斜して配置された像面とを備えて構成する。そして、前側レンズ群を正、後側レンズ群を負の屈折力とし、撮影面2と前側レンズ群の光軸との間の角度のうち鋭角をAin、前側レンズ群の光軸に対して垂直な面と像面との間の角度をAimとしたとき、|Aim|/(90°−Ain)<0.5を満足する。
(もっと読む)
立体撮像装置及び画像補正方法
【課題】被写体距離(フォーカス位置)にかかわらず、複数の撮影光学系の光軸ずれを良好に補正することができ、立体視しやすい複数の画像を取得可能にする。
【解決手段】左右の撮像手段により取得された左右の画像に対して、左右の撮影光学系の光軸ずれ量に対応する画像の切り出し処理を行うことで光軸ずれを補正する。この場合、予め記憶手段に記憶されたフォーカス位置に応じて検出された光軸ずれ量から、現在のフォーカス位置に対応する光軸ずれ量を取得し(ステップS38)、この取得した光軸ずれ量に基づいて左右の画像に対して立体表示用の画像の切り出し処理を行う(ステップS40)。これにより、フォーカス位置(被写体距離)にかかわらず、左右の撮影光学系の光軸ずれを良好に補正できるようにしている。
(もっと読む)
画像補正装置、補正画像生成方法、補正テーブル生成装置、補正テーブル生成方法、補正テーブル生成プログラムおよび補正画像生成プログラム
【課題】補正後の画像における違和感を低減ないし解消することを課題とする。
【解決手段】前記課題を解決するために、本発明の画像補正装置10は、画像入力部11と、画像記憶部12と、補正テーブル記憶部15と、画像記憶部に記憶された入力画像を補正テーブルに基づいて幾何補正する幾何補正部13と、幾何補正部により補正された入力画像を補正画像として出力する画像出力部14と、を備え、補正テーブル17は、補正画像となる出力画像上の各画素位置に対応する角度の組(θ、φ)を算出し、入力画像の投影中心を原点とする3次元直交座標系において、YZ平面をY軸の周りにθだけ回転させた平面と、XZ平面をX軸の周りにφだけ回転させた平面との交線に基づいて光線方向を算出し、光線方向に対応する入力画像上の位置を抽出位置として算出し、抽出位置を出力画像の画素位置に対応付けていることにより生成されたものであることを特徴とする。
(もっと読む)
画像処理装置および画像処理方法
【課題】歪みの形状に応じて発生する補間演算の処理のエラーを回避することができる画像処理装置および画像処理方法を提供する。
【解決手段】撮像光学系の歪曲収差を有する入力画像データに歪補正処理を行う歪補正部を有し、歪補正部は、歪補正処理を行って出力する出力画像データの位置に対応した入力画像データの位置を表す座標を求める歪補正座標変換部と、入力画像データの座標に基づいて、歪補正処理に用いる入力画像データの範囲を算出する範囲算出部と、入力画像データの座標に引き続き、入力画像データの範囲の情報を記憶する補正情報記憶部と、入力画像データ記憶部と、入力画像データの範囲の情報が記憶された後、入力画像データ記憶部に記憶している入力画像データの量を確認し、補間演算に必要な量以上であるときに、入力画像データの座標に基づいて、入力画像データに対して補間演算を行って出力画像データを生成する補間演算部と、を備える。
(もっと読む)
電子機器
【課題】投射画像の歪の補正を迅速に行うことができる電子機器を提供する。
【解決手段】測距センサによりデジタルカメラから投射面上の投射画像50の四隅の位置までの4つの距離を測定し、その4つの距離を表わす数字をLCD表示部22の画面上の四角形の投射画像50の四隅の近傍に表示させる。ユーザは、その数字を手がかりとしてデジタルカメラの向きを調整することで投射画像50の歪みを補正することができる。
(もっと読む)
歪み補正装置
【構成】撮像装置14は、フォーカルプレーン電子シャッタ方式を採用し、ズームレンズ12を通して被写界を捉える。バッファ回路28は、撮像装置14によって捉えられた被写界を表しかつ第1数の水平画素を有する画像データをSDRAM32に書き込む。バッファ回路40は、SDRAM32に格納された画像データを、基準水平画素を含みかつ第1数よりも小さい第2数の水平画素ずつ垂直画素方向に読み出す。バッファ回路40によって読み出された画像データに現われた垂直歪みおよびフォーカルプレーン歪みは、垂直歪み補正回路42およびFP歪み補正回路44によって補正される。垂直歪み補正回路42に設けられたバッファ制御回路は、撮像装置14のパン動作の速度に対応する第3数を第2数から減算した数に相当する水平画素を隔てて、基準水平画素の位置を変更する。
【効果】歪み補正性能が向上する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び光学顕微鏡を搭載した撮像装置
【課題】光学顕微鏡により得られる画像に発生する複雑なディストーションを、高精度に補正することができる情報処理装置、情報処理方法、プログラム、及び光学顕微鏡を搭載した撮像装置を提供すること。
【解決手段】情報処理装置により、チェッカーパターンが撮影された校正用画像の輝度分布に関する標準パターン情報として、正弦波状の曲面を表す関数が生成される。校正用画像の各画素の輝度値と関数の値とのマッチング処理により、校正用画像上の交点が高い精度で判定される。これにより上記交点と理論的なチェッカーパターンの交点との差分に基づいて算出される補正用ベクトル場22の精度も高いものとなる。また補正用ベクトル場22は、平行移動成分と回転成分とをのぞく成分として算出されるので試料画像の補正量を少なくすることができる。以上により光学顕微鏡により得られた試料画像に発生する複雑なディストーションを高精度に補正することができる。
(もっと読む)
撮像装置及びその制御方法
【課題】歪曲補正と回転ブレの補正を行う際に、撮像された画角の情報を有効に利用する。
【解決手段】回転を補正する際に、歪曲補正時に参照する領域が、撮像された撮像画像の領域内に収まるように、回転を補正する方向に検出された回転量分、回転させる。そして、参照する領域内に含まれる撮像画像に対して歪曲補正を適用することにより、撮像画像と同じ大きさの矩形画像を得る。また、検出された回転量分の回転を行うと、参照する領域が撮像画像の領域に収まらない場合は、撮像画像の領域内に収まる最大の角度の分だけ参照する領域を回転させ、参照する領域内に含まれる撮像画像に対して歪曲補正を適用する。
(もっと読む)
撮像装置及びその制御方法
【課題】 離散的なデータから光学的な要因による画質劣化を補正するための補正量を算出する際、動画撮像時と静止画撮像時のそれぞれに適した補正量の算出を可能とする。
【解決手段】 光学補正データベースに、撮像光学系の複数の光学パラメータの値の複数の組み合わせについて、像高に対する撮像光学系に起因する画質劣化を補正するための補正量を離散的に保持しておく。そして、撮像装置の撮像モードが動画モードであれば、静止画モードの場合よりも、像高の数より光学パラメータの組み合わせの数を優先して複数の補正量を選択する。
(もっと読む)
撮像装置及び交換レンズ、カメラ本体
【課題】目的に応じた何通りかの学術的な射影方式によって射影された撮影画像を、作画上の意図に沿った撮像状態となるようユーザー選択によって実現する。
【解決手段】被写体の光学像を結像させる光学系200と、前記光学像を光電変換し電子的画像情報を得る撮像素子110と、複数の射影方式のうち一の射影方式を選択する選択手段248と、前記複数の射影方式に対応する歪曲収差補正データを記憶する記憶手段242と、前記選択手段248によって選択された射影方式に対応する歪曲収差補正データに基づいて前記電子的画像情報に歪曲収差補正を施す補正手段140と、を備えた、ことを特徴とする。
(もっと読む)
画像処理装置及び画像調整方法
【課題】カメラからの画像の歪みを補正する処理を自動的に行なうことを可能とすることで、カメラに関する調整作業の効率化を図ることができる画像処理装置を提供することにある。
【解決手段】カメラ20により動体を撮影して得られる画像を処理するときに、画像上の移動軌跡線を算出し、この移動軌跡線に基づいてカメラのレンズ歪み補正パラメータを調整情報として算出する調整量算出部14を有する画像処理装置10である。
(もっと読む)
画像処理装置及び撮像装置
【課題】歪補正処理をブロックライン単位で行う場合に、ブロックライン毎の重複処理をなくすことが可能な画像処理装置及びそのような画像処理装置を備えた撮像装置を提供すること。
【解決手段】あるブロックラインに対する歪補正処理の際に、あるブロックラインの歪補正処理を行うために必要な現歪補正範囲と、あるブロックラインの次のブロックラインの歪補正処理を行うために必要な次歪補正範囲とを歪補正範囲算出部201において算出する。シーケンサ206は、歪補正範囲算出部201において算出された現歪補正範囲と次歪補正範囲とから、あるブロックラインの処理のために入力する必要がある画像データの範囲を入力範囲として求める。この入力範囲に対応した画像データのうちで次のブロックラインの歪補正処理を行うためにも用いられる糊代画像データを糊代保存メモリ403に格納し、次のブロックラインの歪補正処理においては糊代画像データを用いて歪補正処理を行う。
(もっと読む)
画像処理装置、半導体データ処理装置及びデータ処理システム
【課題】画像の幾何学的歪補正を、使用メモリリソースや演算処理時間などの点で効率化する。
【解決手段】歪補正された輝度成分データを生成する歪補正回路(15)は、カメラによって撮影された画像の領域を仕切るための第1格子パターン(GPTRNa)の格子点(GRDa1)と前記第1格子パターンに対応する歪補正後の第2格子パターン(GPTRNb)の格子点(GRDb1)との差分(DIF)を表す差分パラメータをメモリから読込み、読込んだ差分パラメータと第2格子パターンの格子点の座標を用いて前記第1格子パターンの格子点の座標を演算し、演算された3個の座標で頂点が規定される三角形領域の輝度成分データを対応する第2格子パターン上の三角形領域に描画する処理を行なう。
(もっと読む)
1 - 20 / 95
[ Back to top ]