
Fターム[5C122EA65]の内容
Fターム[5C122EA65]に分類される特許
761 - 780 / 780
撮像装置

【課題】主要被写体がイメージャの中心から外れた領域に結像している場合でも、電子ズームによってズームアップした主要被写体にピントを合わせ、なおかつ、幾何学的な歪みも補正することができるようにする。
【解決手段】被写体像を光電変換により画素データとして取得するイメージャ102と、イメージャ102から画像データを読み出すべき領域を設定する読み出し領域設定手段104と、読み出し領域の画像データをブロック毎に読み出す画像変換記録表示部103と、読み出し領域の位置及び大きさに応じた撮像に最適な位置を算出する撮像面最適位置算出手段106と、イメージャ102の撮像面を算出された最適な位置に駆動する傾き調節機構107とを具備する。
(もっと読む)
監視カメラおよび監視システム

【課題】 異常音が発生したときだけ、その異常音の発生位置を中心に撮影して、撮影画像および撮影動作に無駄が生じるのを回避する。
【解決手段】 音声入力部13に外部音が入力されると、音質判定部15がその外部音の音声信号に基づいて、外部音が異常音か否かを判定する。また、位置検出部14が、その外部音の音声信号に基づいて、上記外部音の発生位置を検出する。制御部16は、音質判定部15および位置検出部14での両方の結果に基づいて、カメラ本体1aを駆動する。例えば、音質判定部15にて外部音が異常音であると判定され、位置検出部14にてその外部音の発生位置が検出されれば、制御部16は、異常音の発生位置の方向にカメラ本体1aの向きを変更したり、撮影レンズ12の焦点距離を変更し、画角変更を行う。
(もっと読む)
自動追尾機能を有する撮像装置
【課題】撮影対象を複数方向から同時に撮影し、撮影対象が動く場合でも自動的に撮影対象を追尾することができる撮影装置において、複数方向から撮影するための撮像デバイスの動きを連動させる。
【解決手段】撮像対象を設置するための撮像対象設置領域3と、撮像対象2の異なる側面を撮像する複数の撮像デバイス1a〜1lとを有し、撮像デバイス1a〜1lはそれぞれ、複数の方向から撮像対象2の側面を撮像するように通信路5上に配置され、撮影対象2を1台のカメラ(例えば1a)が追うと残りのカメラ(例えば1b〜1l)も撮影対象2を追尾するように自動的にパン、チルト、フォーカスが制御される手段を備える撮影装置。
(もっと読む)
監視システム
【課題】
自動的にワイパを動作させて操作性の向上を図ること、ワイパの寿命を延ばすこと、及び、鮮明な画像を得ることによって、画像処理による物体の検出及び追尾を正確に実行する監視システムを提供する。
【解決手段】
雨滴センサ内臓ワイパ付カメラハウジングの雨滴センサ、雨滴センサの検知によって、降雨や降雪が連続的でワイパを連続的に動作させる必要がある場合、モニタ等の表示装置にて監視者が確認している場合はワイパを駆動し、確認していない場合はワイパを駆動しない。また、記録装置にて記録している場合のみワイパを駆動し、記録していなければ場合はワイパを駆動しない。また、画像処理によって検出または追尾をしている時のみワイパを駆動し、画像処理を行っていない場合はワイパを駆動しない。
(もっと読む)
移動体追跡システム、撮影装置及び撮影方法
【課題】 複数の撮影装置が協調動作を行うことにより、撮影対象となる移動体を広範囲において追跡して撮影することを課題とする。
【解決手段】 複数の撮影装置(11)の協調動作により移動体(1)の追跡を行う移動体追跡システムであって、各撮影装置は、移動体を撮影して認識するための撮影手段(21)と、撮影手段の撮影範囲を変更するための変更手段(24)と、自己の撮影装置の位置を取得するための位置取得手段と、自己の撮影装置と移動体との間の距離を取得するための距離取得手段と、自己の撮影装置の識別子、自己の撮影装置の位置、移動体の進行方向、及び自己の撮影装置と移動体との間の距離を他の撮影装置に送信し、他の撮影装置の識別子、他の撮影装置の位置、移動体の進行方向、及び他の撮影装置と移動体との間の距離を他の撮影装置から受信するための通信手段(30)とを有する移動体追跡システムが提供される。
(もっと読む)
撮像システム及び撮像方法
【課題】動体を検索する固定、もしくはパンチルトカメラとその動体をズームして動体の詳細を撮影するためのパンチルトカメラを用いて動体を複数検知した場合に、効率よくまた確実に複数の動体の詳細画像を取得できるようにする。
【解決手段】センサーカメラ10で広範囲な撮影を行いつつ、ズームカメラ20でその撮影範囲内の追跡対象を撮影するにあたり、広範囲な撮影を行うセンサーカメラ10により得られるセンサー画像から動体の位置と大きさを動体検知モジュール32により抽出し、抽出された複数の動体から一つの撮影画角を撮影画角計算モジュールにより決定し、決定された画角の位置、移動速度、大きさから、上記センサーカメラ10の撮影範囲内の抽出された複数の動体を追跡対象として追跡対象画像取得モジュール34によりズームカメラ20で撮影させる。
(もっと読む)
特定行動定量化システム及び特定行動定量化方法
【課題】 モデル動物の特定行動のダイナミクスを定量化する。
【解決手段】 特定行動定量化システム10は、モデル動物を撮像するカメラ20と、カメラ20により撮像された映像データから、モデル動物の所定の2つの部位間の距離を算出する距離算出部31と、距離算出部31により算出された距離の時系列情報から、予め設定した条件に基づき、モデル動物の特定行動のダイナミクスを定量化する定量化部32とを備える。
(もっと読む)
監視装置
【課題】侵入物体の全体を撮影することができる監視装置を提供することにある。
【解決手段】カメラ1の撮影範囲12の中心部13と、全検知範囲41の中心部42が概略一致するようにカメラ1のレンズ11の近傍に取り付けた、複数の赤外線センサ4a、4b、4c、4dの侵入物体による赤外線の変化に応じた信号のレベルから、撮影範囲12の中心部13と侵入物体の位置とのずれ方向を判定し、撮影範囲12を侵入物体の方向に移動させ、侵入物体の追尾、撮影、監視を行う。
(もっと読む)
カメラスタビライザ取付誤差取得方法およびこの方法を適用するカメラスタビライザ
【課題】カメラスタビライザの基準方位と機体の基準方位との差である取付誤差を正確に取得する方法の提供。
【解決手段】機体の現在の位置をGPS1で、目標(建造物など)位置を地図2でそれぞれ取得する。機体のAHRSで機体の正確な方位角ψbを取得する。カメラスタビライザ10のジンバルユニット4からアジマス角AZn、エレベーション角ELn、ロール角RLnを取得する。カメラと一体にジンバルユニット4に搭載された垂直ジャイロ(VG)5からカメラの姿勢角であるピッチ角θc及びロール角φcを取得する。視軸方向演算部7は、機体の現在位置および目標位置から目標方位角DirTを算出する。また、視軸方向演算部7は、ψb,θc,φc、AZn,ELn及びRLnからカメラの方位角ψcを求め、カメラスタビライザ取付誤差ψeを、ψe=DirT−ψcなる式により演算する。
(もっと読む)
撮像装置及び撮像方法
【課題】 特定の被写体を簡単に追尾して撮像できるようにする。
【解決手段】 撮像部11によって、所定のパターンで発光する発光素子25が装着された特定の被写体20−3を撮像して撮像画像データを取得し、画像処理部12は、撮像画像データから発光素子25の発光パターンを検出して特定の被写体20−3と特定の被写体20−3の位置情報を検出し、撮像範囲15と特定の被写体20−3の位置関係を利用者に提示する。
(もっと読む)
移動体追跡装置
【課題】異なる時刻に撮像された2つの画像に基づいて対象物の移動量を検出する際の演算量を低減しつつ、対象物の移動量が小さい場合でも、検出精度を低減させることなく移動量を検出する。
【解決手段】追跡可能領域検出部30は、撮像部10により撮像された画像を複数の領域に区分し、各領域ごとに、移動体を追跡可能な追跡可能領域を検出する。移動量検出部60は、画素結合部50で画素結合が行われた領域を1単位として、テンプレートと新規画像との相関値を求めることにより、追跡可能領域の移動量を検出する。結合量制御部70は、移動量検出部60で演算された移動量が所定のしきい値以下の場合には、画素結合量を小さくし、移動量検出部60は、小さくした画素結合量にて画素結合された領域を1単位として、再度、追跡可能領域の移動量を検出する。
(もっと読む)
光学撮像におけて関心領域を選択するための方法および装置
カメラを使用して哺乳動物のデジタル画像を得、デジタル画像を使用して関心領域を選択するように構成された、光学撮像のために哺乳動物を配置するための方法およびシステムを提供する。選択された領域は光学撮像システムに登録され、哺乳動物は選択された関心領域を撮像するように撮像システム内に配置される。  (もっと読む)
(もっと読む)
流し撮り方法および撮影装置
【課題】移動被写体に対する流し撮りの自動化を、撮影者が面倒な操作や作業を行うことなく、特別なセンサ等の装置を使用せず安価に実現する。
【解決手段】デジタルスチルカメラに移動可能な補正光学系とぶれ情報取得部と被写体速度算出部とを設け、流し撮りモードで撮影を行うと、移動被写体を追尾せずに通常と同様の方法で撮影してデジタル写真画像(試し撮り画像)を取得し(#4)、この試し撮り画像に基づいて画像中の移動被写体のぶれの大きさを表すぶれ情報を算出し(#5)、そのぶれ情報とシャッター速度に基づいて移動被写体の試し撮り画像中における移動の速さを算出し(#6)、算出された速さと予め入力された(#1)被写体の移動の向きとに基づいて、移動被写体の移動による被写体の像のぶれを打ち消すように補正レンズを移動させながら(#9)、流し撮りの本撮影を行うようにした。
(もっと読む)
カメラ連動システム、カメラ装置およびカメラ連動制御方法
【課題】 従カメラが迅速に主カメラに追従することのできるカメラ連動システムを提供する。
【解決手段】
パーソナルコンピュータ20は制御装置であり、複数のカメラ装置12から選ばれた主カメラの方向を指示する主カメラ方向情報を、主カメラを含む複数のカメラ装置12へ提供する。複数のカメラ装置12の各々は、自カメラと他カメラとの相対位置情報を記憶している。他カメラが主カメラであるとき、相対位置情報に基づいて、主カメラ方向情報を従カメラ方向情報に変換する。従カメラ方向情報は、自カメラを従カメラとして主カメラに追従させるための方向である。そして、各カメラ装置12は、自カメラが主カメラであるときは主カメラ方向情報に応じて、自カメラが主カメラでないときは従カメラ方向情報に応じて、自カメラの回動機構を制御する。
(もっと読む)
複数のカメラを用いたパノラマ映像化を可能とする方法およびシステム
パノラマ映像化システム20は、オーバーラップする視野14を有する複数のカメラを有する。ポインティング・デバイス22は、ビューポート方向情報を処理システム21に供給し、処理システムは、視野14を結合して、カメラ12によって撮像されたパノラマビューを表すパノラマビュー・データを生成し、ビューポートの方向に沿うビューポート・データを生成する。処理システムはビジョン処理ボードを用いる。表示装置26は、画像領域を示すビューポート113のデータを映す。処理システムは、カメラの相対位置、個々のカメラのレンズ歪曲、ロール、ピッチ、ヨーに関して補正を行なう。本システムは、自動的にビューポートを動かして対象を追跡する自動追跡アセンブリを含んでもよく、処理システムは、複数のユーザーが複数のビューポートを見ることができるようにしてもよい。カメラは車両700に搭載される。  (もっと読む)
(もっと読む)
生物の眼球運動神経システムに基づいたバイオ型自動視覚と視線制御システム
【課題】本発明は生物の眼球運動制御の原理を用いて、カメラの視覚認識と視線運動制御システムを構築する。
【解決手段】 本発明の基本システムには、眼に相当するものは広角及び望遠レンズ付きの複数のカメラにより構成されたカメラセットであり、各カメラセットは人間の眼球のように3自由度に回転でき、さらに衝動性眼球運動、滑動性眼球運動、前庭動眼反射、視機性反射運動など人間の眼球運動の特徴を有する。すなわち、本発明のシステムは注視する視標の高速切り替え、高精度・高速の視標追従運動、基盤の振動により生じた視線偏差の補償などの機能を備えている。特に本発明の両眼モデルの場合は両眼が人間のように同一視標しか追従できない特徴があり、視標の距離を瞬時に測定することができる。本システムは広範囲の監視と重要箇所の高精度の画像を同時に得られるので、監視、保安、看護など広い領域で応用可能である。さらに、本システムは自身の運動を補償する機能があるので、車、船、飛行機、ロボットなどの運動物体の視覚としても最適である。本システムを玩具やペットロボットの眼の運動制御に応用する場合、その眼球は生き物のように動くので、持ち主には玩具やペットロボットに「魂」が入っているような感覚を与えることができる。 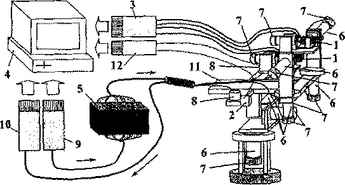 (もっと読む)
(もっと読む)
撮像装置およびズーム撮像方法およびプログラム
【課題】所望の倍率で実際の撮影範囲の外の広い範囲において、動きのある遠距離にある被写体を容易に確認して追跡可能とするとともに、実際の撮影時には、撮影者が予め設定しておいた所望の相対倍率に、光学的にズームアップさせて撮影することで、動きのある遠距離にある被写体を光学的に拡大して優れた映像を容易に撮影可能にすること。
【解決手段】設定される相対倍率値を記憶部110に記憶させておき、撮影用シャッタボタン109により撮像指示がなされた際に、記憶部110に設定される相対倍率値に応じた距離だけ画像入力部106内の撮影レンズを受像部102から遠ざけるように移動させて光学的に撮像画像を拡大させるズームイン動作を行い、該ズームイン動作完了直後に、受像部102に受像させ、該受像直後に、前記撮影レンズを前記ズームイン動作前の状態に戻すズームアウト動作を行うようにCPU101が制御する構成を特徴とする。
(もっと読む)
画像処理装置、画像処理方法
【課題】予め動画像が記録された記録媒体を再生し、その中の特定な被写体を指定して、複数シーンをプリンタに直接印刷したい場合、その都度、手動で印刷範囲を設定し直して印刷しなくてはいけない不具合があった。
【解決手段】記録媒体を再生して得られる被写体を指定し、印刷範囲枠の大きさを操作者が決定すると、前記指定した被写体の画角に応じて、前記印刷範囲枠の大きさを自動的に変化させるようにする。また、被写体の動きに応じて自動追尾し、その画像を任意のタイミングでプリンタから直接、自動的に印刷するようにすることにより、操作者の手間を大幅に削減できるようにするとともに良好な印刷結果を得られるようにする。
(もっと読む)
カメラ・ポーズを決定する方法および装置
(例えばコンピュータ・ビジョン・システムで使用される)6つの自由度で特徴付けられるカメラ・ポーズを決定する方法および装置が開示される。一実施形態では、カメラでキャプチャされたイメージが受領され、潜在的ポーズに関する少なくとも2つの制約が、カメラに対するイメージの既知の関係に従って実施され、それによって潜在的ポーズが、残りの2つの自由度に制限される。次いで、少なくとも1つの潜在的ポーズが、その残りの2つの自由度に従って決定される。 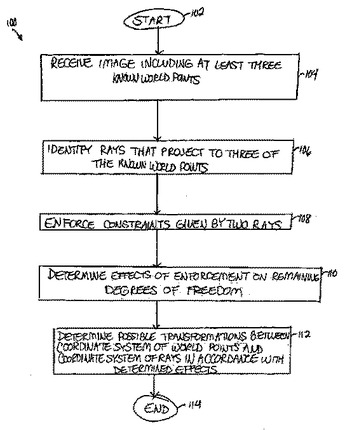 (もっと読む)
(もっと読む)
電子ビューファインディングを支援する装置
カメラ機能付き装置は、電子ビューファインディングを支援する。当該装置の画像センサ(100,102)は、手動で場面に向けられる。画像センサ(100,102)から得られた検査画像は、検査画像の境界範囲内にある所定の種類の対象の画像化を試験する所定の基準を検査画像の内容が満足するかどうかを示す指示信号を発生させるよう、電子的に処理される。画像センサ(100,102)は、検査画像が所定の基準を満足したことを指示信号が示すまで、向きを変えられる。更なる処理動作は、検査画像が所定の基準を満足したことを指示信号が示すように画像センサが向きを変えられる場合に得られる捕捉画像へ選択的に適用される。  (もっと読む)
(もっと読む)
761 - 780 / 780
[ Back to top ]