
Fターム[5C122FB12]の内容
Fターム[5C122FB12]に分類される特許
1 - 20 / 73
画像処理装置および方法、並びにプログラム
【課題】より簡単かつ迅速にパノラマ画像の所望の方向の領域を切り出すことができるようにする。
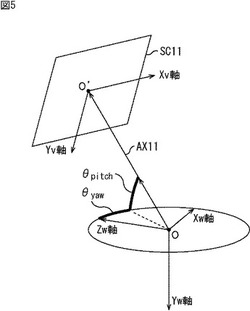
【解決手段】画像処理装置は、球面に投影されたパノラマ画像の所定の視線方向の領域を切り出して表示させる場合、指定された視線方向により定まる仮想的なスクリーンに投影されるパノラマ画像の領域を出力画像として表示させる。すなわち、画像処理装置は、スクリーン上の位置に投影されるパノラマ画像の画素位置を近似関数により算出し、出力画像を生成する。このとき、画像処理装置は、近似関数による近似誤差の評価を行なう。具体的には画像処理装置は、スクリーン上の書き込み領域内の各位置に対応するパノラマ画像の画素位置を1つの近似関数を用いて求めるときに、近似誤差が許容量以下となるように書き込み領域の範囲を定める。本技術は、画像処理装置に適用することができる。
(もっと読む)
画像表示装置

【課題】視認性の高い画像表示装置を提供する。
【解決手段】本発明の画像表示装置1は、周方向全周(周囲360°)に画像を表示可能な半球状のスクリーン20を有する表示部10と、スクリーン20の頂部に全周囲(周囲360°)を撮影可能な画像撮影部40と、制御装置50と、を備えている。画像表示装置1は、制御装置50によって制御され、スクリーン20による画像表示時において、画像撮影部40によって画像表示装置1の外部周辺を撮像し、その撮像情報から輝度分布検出部によって領域毎の輝度分布を検出し、輝度の高い領域周辺のスクリーン20の画像表示を明るくする。
(もっと読む)
撮像装置
【課題】フィルムカメラやデジタルカメラなどの撮像装置で、広角レンズあるいは回転体ミラーを用いて撮影した場合に無駄になっていた、フィルムや撮像センサの四隅の領域を、有用な情報を記録するための領域として利用する。
【解決手段】撮像装置の筐体101に、光を内部に導くための導光窓105を設け、撮像センサ103までの光路として導光路107を設け、導光路107の途中に、光を透過する材質で作成された環境センサ106を配置する。魚眼レンズ102からの光が結像しない撮像センサの領域104に、環境センサが表示している環境情報を画像108として結像させる。
(もっと読む)
音検出装置及びその制御方法、プログラム
【課題】 精度良く音を検出する音検出装置及びその制御方法、プログラムを提供する。
【解決手段】 音を検出するための閾値を用いて、音入力部から入力した音から特定の音を検出する。撮像部が撮像した画像を記録する。記録した画像と撮像部が撮像した現在の画像との差分をとり、現在の画像から、動体のある箇所を検出する。撮像部が撮像する画像中の特定位置を示す情報とその特定位置で起こり得る音を示す情報との対応を管理する。動体が検出された場合には、位置・音対応情報管理部で管理される音を検出するための閾値を変更し、その変更した閾値を用いて、該位置・音対応情報管理部で管理される対応を参照して、音入力部から入力した音から特定の音を検出する。
(もっと読む)
全方位撮像装置、及びその制御方法
【課題】全方位を撮像可能なカメラにおいて、簡単に物体を認識できるようにする。
【解決手段】全画素を読み出して全方位を撮像する第1のモード、または前記全画素の一部を読み出して特定の被写体を撮像する第2のモードにより撮像を行う撮像センサ102と、カメラ部を回転させる回転台103とを備えた全方位撮像装置であって、動体検知部104は、第1のモードにより撮像された範囲から被写体の動きが検知すると、検知情報を撮像センサ制御部106及び回転台制御部107に送る。そして、回転台制御部107は、第2のモードにより前記動きを検知した被写体を正立状態で撮像できる角度にカメラ部を回転させるよう制御する。
(もっと読む)
アムニディレクショナル(Omnidirectional)監視映像
【課題】上面に設置したミラーを撮像することで、広角映像を得る監視カメラレンズにおいて、レンズに埃が堆積することを防止するとともに、広角映像を得るための凸面鏡(ドーム型)ミラー形状は、上下の距離があるために発生するピンボケを防止する。
【解決手段】監視カメラ本体の位置を外から凸面鏡(ドーム型)死角ミラー内部に変更すると同時に、凸面鏡(ドーム型)死角ミラー下に小さい凸面鏡を固定し凸面鏡(ドーム型)死角ミラーを鏡に写しだし内部監視映像を可能にした。また、ピンボケの防止のため、小さい凸面鏡を撮像することとした。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
パノラマ撮影システム
【課題】異なる光軸方向におけるパノラマ画像を得ることができるパノラマ撮影システムを提供する。
【解決手段】光軸が直交するパノラマレンズ鏡胴110及び結像レンズ鏡胴120を備える。結像レンズ鏡胴120は、入射瞳面121を含み、パノラマレンズ鏡胴110は、パノラマレンズ10、リレーレンズ12及び反射素子14を備える。パノラマレンズ10は、物側に凸状となった環状入射面S1と、結像側に凸状となっており、前記環状入射面S1から入射した光を反射する環状反射面S2と、物側に凹状となっており、前記環状反射面S2からの光を反射する円状反射面S3と、結像側に凸状となっており、前記円状反射面S3からの光を結像側に出射する円状出射面S4と、を含む。円状出射面S4からの光線はリレーレンズ12を介して入射瞳面121に伝えられ、結像レンズ鏡胴120によってパノラマ画像123を結像する。
(もっと読む)
電子機器
【課題】 イメージセンサーユニットを監視カメラとして使用して、ほぼ全方位の被写体を撮影できる電子機器を提供する。
【解決手段】 機器ケース1と、この機器ケース1に設けられたイメージセンサーユニット4と、全方位の被写体の像を前記イメージセンサーユニットに向けて反射させるための全方位型のミラー部13と、このミラー部13をイメージセンサーユニット4の画像取込み位置と非画像取込み位置とに移動させる移動部材であるスタンド部材3のリンク部8とを備えている。従って、スタンド部材3のリンク部8によってミラー部13をイメージセンサーユニット4の非画像取込み位置に移動させた際に、イメージセンサーユニット4によって通常の撮影をすることができるほか、リンク部8によって全方位型のミラー部13をイメージセンサーユニット4の画像取込み位置に移動させた際に、ミラー部13によってほぼ全方位の被写体の撮影をすることができる。
(もっと読む)
全方位カメラ及び全方位レンズ
【課題】表示画像の各画角で不均一になりやすかった解像度を改善した全方位カメラ及び全方位レンズを提供する。
【解決手段】全方位カメラは、周状に形成された側面を構成し、周囲360度の方向から光を入射する入射面11と、入射した光を反射する反射層13が形成された凸面である反射面12と、反射層13で反射した光を出射する出射面15とを有するレンズプリズム10と、レンズプリズム10から出射された光を、所定の方向に導く光学系30,40,51と、光学系30,40,51に導かれた光を受光して、撮像画像を得る撮像素子55と、を備える。入射面11と反射面12とは非球面タイプのトロイダル面を形成し、出射面15は非球面タイプの凹面を形成する。
(もっと読む)
パノラマ展開画像撮影システムおよび方法
【課題】ディスプレイに全周囲画像をパノラマ展開して表示する際、2段以上に分割する必要があるが、注目する物体が分割するところで切れてしまうという課題があった。
【解決手段】パノラマ展開画像を少なくとも2つのパノラマ画像に分割して表示するパノラマ展開画像表示装置であって、前記パノラマ展開画像に対して切り出し基準位置を設定する、切り出し基準位置設定部と、前記パノラマ展開画像から表示ターゲットとなる被写体を検出する被写体検出部と、検出された被写体位置と切り出し基準位置の関係からパノラマ画像の切り出し位置を決定する切り出し位置決定部と前記切り出し位置で前記パノラマ展開画像から切り出したパノラマ画像を表示する表示画像生成部とからなるパノラマ展開画像表示装置を提供する
(もっと読む)
アムニディレクショナルと防犯・監視カメラ統合で死角無し
【課題】従来の監視カメラでレンズによる制約から起きる死角をなくし、かつ、歩行者側が死角にある対象から自分を守るツールを得る。
【解決手段】凸面鏡を天井に固定し、歩行者から見た死角をなくす。また、CCDカメラステーの下側に現在ある防犯・監視カメラやダミーカメラを必要な場所に複数配置することで、常に360度枠に特定の人物を追跡することができる。また、ドーム型監視カメラを水平・上下90度・ズーム機能付自動で動くものとした場合、特定人物を死角無しに追え、拡大しながら監視できる。
(もっと読む)
個人用通信装置用アクセサリ
スマートフォンのハンドセット(1)のような個人用通信装置は、レンズ(5)を有するカメラ(4)を内蔵した本体(2)を有する。個人用通信装置のアクセサリ(6)はカバー(8)によって本体(2)に着脱式に取り付け可能である。また、アクセサリ(6)は、パノラマ視野からレンズへ光を反射するように配置された光学装置(7)も備える。光学装置(7)は、好ましくは、360度の視野からの光をカメラ(4)に反射する凸面鏡(9)を有する。このような配置により、ユーザは周囲の画像を完全に取り込むことができるため、その画像は、ユーザが経験した時の過ぎ行く瞬間の客観的な記録となる。本発明は、従来の装置に比べ、さらに可搬性と汎用性に優れている。 (もっと読む)
撮影装置、及びこの撮影装置を搭載した水中ロボット
【課題】
1台のカメラで、多方向の画像を取得する撮影装置において、低コストで、小型で、且つ、肉眼で観察する場合と同じ画像情報(左右が反転していない画像情報)を取得でき、更に、画像処理のための大規模なシステムを必要としない撮影装置、及びこの撮影装置を搭載した水中ロボットを提供することにある。また、水道管等の点検作業の効率を、飛躍的に向上した水中ロボットを提供することにある。
【解決手段】
多方向の画像を1台のカメラで同時に取得できる撮影装置1において、前記画像を取得するカメラ2と、前記カメラ2の側方に配置した複数の側面鏡3と、前記カメラ2の前方に配置した反射鏡4を有しており、前記側面鏡3及び前記反射鏡4を平面鏡で構成し、且つ、前記カメラ2の側面の画像情報Iを、前記側面鏡3から前記反射鏡4に投影し、前記反射鏡4を前記カメラ2で撮影して、前記画像を取得する。
(もっと読む)
車載カメラ
【課題】 複数の撮像対象を撮影可能であり、または防水対策を簡易化することが可能である車載カメラを提供すること。
【解決手段】 車両801に取り付けられるカメラモジュール101を備える車載カメラ11であって、カメラモジュール101の撮像範囲の少なくとも一部を占めるミラー300をさらに備える。
(もっと読む)
較正情報算出方法、較正情報算出装置、及び広角画像処理装置
【課題】広角画像の歪を高精度に補正することが可能な較正情報算出方法、較正情報算出装置、及び広角画像処理装置を提供する。
【解決手段】広角画像処理装置1は、較正画像表示部120により表示された複数の較正パターンを有する較正画像を広角撮像部110により撮像する。そして、撮像された広角画像上の較正パターンが示す複数の格子点を検出し、検出された複数の格子点について、空間コード化法の原理を用いて、三次元空間上での位置を算出する。そして、複数の格子点の広角画像上での位置と、算出された三次元空間上での位置との幾何学的関係から広角画像の歪みを補正するための較正情報を算出する。また、算出された較正情報に基づいて、広角撮像部110が撮像した広角画像の歪補正を行う。
(もっと読む)
撮像装置
【課題】 広範囲の視野を確保することが可能な撮像装置を提供する。
【解決手段】 広角レンズ6と、少なくとも側方からの外光を反射する双曲面または放物面の形状をとるミラー7と、広角レンズ6及びミラー7を通った外光に基づいて形成される各被写体像を撮像できる撮像素子9と、撮像素子9によって撮像された各被写体像から、系外の画像情報を球体の表面に有する球面画像を形成する画像形成手段14と、を備え、広角レンズ6の焦点と、ミラー7の一方の焦点とが一致するよう広角レンズ6とミラー7とが配置される。
(もっと読む)
結像レンズおよびカメラ装置および携帯情報端末装置
【課題】半画角:38度程度の広角で、Fナンバが2.0程度以下と大口径・比較的小型で、デジタルカメラやデジタルビデオカメラに適した高性能の結像レンズを実現する。
【解決手段】単焦点の結像レンズであって、開口絞りSと、第1レンズ群Iと、第2レンズ群IIとで構成され、第1レンズ群Iは第1Fレンズ群1Fと第1Rレンズ群1Rとを、第1レンズ群中で最も広い空気間隔を隔して配置してなり、第2レンズ群IIは、第2Fレンズ群2Fと、第2Rレンズ群2Rとを配してなり、第2Rレンズ群は、光軸を離れて周辺になるに従い正のパワーが弱くなる形状の非球面を1面有し、第2Fレンズ群2Fの焦点距離:f2F、第2Rレンズ群の焦点距離:f2Rが、条件:(1)0.4 <f2F/f2R< 0.6を満足し、且つ、第2Rレンズ群の非球面は、サグ量:D2とD1とが、条件:(2)0.3< D1/D2 < 0.5を満足する。
(もっと読む)
ビジョンシステム
【課題】本発明は、全方位の画像情報と指定領域の拡大画像情報とを1つの撮像光学系によって取得することができ、且つ、指定領域については、高解像度の拡大画像情報を取得することができる新規なビジョンシステムを提供することを目的とする。
【解決手段】本発明のビジョンシステムは、全方位撮像モードにおいては、撮像光学系の光軸を曲面ミラーの回転対称軸に一致させて全方位画像を取得する一方、ズーム撮像モードにおいては、撮像光学系の光軸が曲面ミラー上の指定位置を通るように撮像光学系または曲面ミラーの少なくとも一方を駆動制御して両者の相対位置を変更し、曲面ミラー上の指定位置に写ったズーム対象の虚像を撮像光学系が光学ズームにより撮像する。
(もっと読む)
オブジェクト検出装置及びオブジェクト検出方法
【課題】全方位動画像から人物等のオブジェクトを検出する際の処理量の削減が可能なオブジェクト検出装置及びオブジェクト検出方法を提供する。
【解決手段】画像入力部10により入力された高解像度の画像に対して、前景抽出部11が前景領域を含む矩形領域を抽出し、その抽出された矩形領域が検知サイズ設定部12に設定された設定値に合致しているかどうかを領域判定部13が判定し、合致していた場合、画像変換部14が透視投影画像に変換し、変換された透視投影画像に対して、オブジェクト検出部15がオブジェクト検出処理を行う。オブジェクトを検出すると、その後のフレーム以降は、探索範囲設定部16が設定した探索範囲を用いて、低解像度の全方位画像によりオブジェクトの追跡を行う。
(もっと読む)
1 - 20 / 73
[ Back to top ]