
Fターム[5C122GD04]の内容
スタジオ装置 (397,422) | カメラ/カメラ付属機器の支持 (2,858) | 雲台(パン/チルト) (855)
Fターム[5C122GD04]に分類される特許
841 - 855 / 855
雲台装置

【課題】 パン・チルト機能を有する雲台について、温度環境の変化による部品の膨張収縮を抑え、特に駆動機構の持つバックラッシュを低減する。
【解決手段】 パン方向及びチルト方向に駆動可能な駆動機構を有する雲台装置であって、該駆動機構を構成する歯車部の線膨張係数と該歯車部を支持する支持板の線膨張係数が等しいことを特徴とする雲台装置を提供する。
(もっと読む)
多目的回転台装置

【課題】 雲台を回転円板に複数取り付けて,該雲台のクイックシュー取付け台に又はクイックシューにメーッセージボード,照明,センサー等を取付け固定若しくは雲台二組を天台板で渡橋固定し,一体的な平面スペースを形成し,そこに実物商品や大型看板,画像デスプレー等を設置し,電源等を入れて実動作させながら,該天台板を水平若しくは任意な傾斜を持たせて円板をモータで回転駆動する多目的回転台装置。
【解決手段】 雲台のパンハンドルを回転板の外側に配置するように雲台軸を固定し,回転板を駆動するモータ回転軸にスリップリング軸を連結させ,回転体に情報信号や電力を供給できるようにし,衝撃荷重や過負荷軸荷重でモーター減速器やスリップリングが破損しないようにマグネットスリップクラッチ機構を回転機構に介在させて過負荷時のトルクを遮断し,さらに回転板の裏面に車輪を取り付けたゴム車輪等で載置する物品や看板の荷重を受けさせスムースに回転させることを目的とした多目的回転台装置。
(もっと読む)
ステージ装置及びこのステージ装置を利用したカメラの手振れ補正装置
【課題】 Y方向移動部材またはX方向移動部材のY方向棒状部とX方向棒状部を同一平面上に位置させることが可能なステージ装置及びこのステージ装置を利用したカメラの手振れ補正装置を提供する。
【解決手段】 固定支持基板;この固定支持基板に、該固定支持基板と平行な特定のY方向に相対移動可能に支持された、Y方向に伸びるY方向棒状部と、このY方向棒状部に接続され、該固定支持基板と平行で上記Y方向と直交するX方向に伸びる一対のX方向棒状部とを備えるY方向移動部材;及び該Y方向移動部材の上記一対のX方向棒状部に、上記X方向に相対移動可能に支持されたX方向移動部材;を備えたステージ装置において、上記Y方向移動部材の少なくとも一方の上記X方向棒状部が、上記Y方向棒状部に対して、該Y方向棒状部の軸線回りに回転可能であることを特徴とするステージ装置。
(もっと読む)
生物の眼球運動神経システムに基づいたバイオ型自動視覚と視線制御システム
【課題】本発明は生物の眼球運動制御の原理を用いて、カメラの視覚認識と視線運動制御システムを構築する。
【解決手段】 本発明の基本システムには、眼に相当するものは広角及び望遠レンズ付きの複数のカメラにより構成されたカメラセットであり、各カメラセットは人間の眼球のように3自由度に回転でき、さらに衝動性眼球運動、滑動性眼球運動、前庭動眼反射、視機性反射運動など人間の眼球運動の特徴を有する。すなわち、本発明のシステムは注視する視標の高速切り替え、高精度・高速の視標追従運動、基盤の振動により生じた視線偏差の補償などの機能を備えている。特に本発明の両眼モデルの場合は両眼が人間のように同一視標しか追従できない特徴があり、視標の距離を瞬時に測定することができる。本システムは広範囲の監視と重要箇所の高精度の画像を同時に得られるので、監視、保安、看護など広い領域で応用可能である。さらに、本システムは自身の運動を補償する機能があるので、車、船、飛行機、ロボットなどの運動物体の視覚としても最適である。本システムを玩具やペットロボットの眼の運動制御に応用する場合、その眼球は生き物のように動くので、持ち主には玩具やペットロボットに「魂」が入っているような感覚を与えることができる。 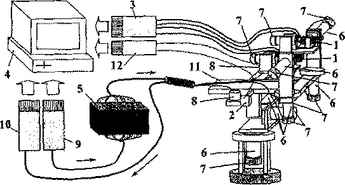 (もっと読む)
(もっと読む)
撮像装置
【課題】 窓部を円筒曲げ形状にして、容易に製造することができるようにすると共に、焦点距離のずれを防止する。
【解決手段】 透光性の窓部15が設けられた装置本体11と、装置本体11内にパン方向に回動可能に配設され、窓部15を介して外部を撮像する撮像機器16とを備える。窓部15は、パン方向に湾曲した円筒曲げ形状をなし、撮像機器16には、チルト方向に湾曲した窓部と同じ曲げ半径の円筒曲げ形状をなす補正板21が取り付けられる。縦方向及び横方向の光は、窓部、補正板の何れかで一度屈折し、焦点距離が同じとなり、撮像素子に結像される。
(もっと読む)
カメラ制御装置及びカメラ制御方法
【課題】カメラの視野角に影響を受けることなく、しかも撮像する映像画面の任意の箇所が指定された場合であっても、同じ精度でかつ高精度で、指定された箇所が映像画面の中心に位置するようにカメラ視野を移動させることを目的とする。
【解決手段】カメラ制御装置を取り巻く空間に3次元の座標軸を用いて撮像機器の場所を原点とする絶対座標を付与する。カメラの視野角と映像画面の解像度との三角関数の関係から第一の長さを算出し、これを絶対座標軸のいずれかに単位として与える。映像画面は前記原点を中心とし前記第一の長さを半径とする球に接する平面として存在し、映像画面の中心は当該球と当該平面との接点であるとする。上記空間のすべてを3次元の絶対座標で表現し、上記球の表面におけるパン、チルトの軌跡を明確にすることで精度の高い、かつカメラの視野角に左右されないパン角度、チルト角度の指令値を得ることができる。
(もっと読む)
撮像装置及びその制御方法
【課題】 撮像開始地点と撮像終了地点とを定めてその間を直線的に撮像するプリセット制御を好適に行うことができる撮像装置及びその制御方法を提供する。
【解決手段】 カメラ装置100は、パン角度及びチルト角度を変化させることにより撮像方向を水平及び垂直に傾けて被写体を撮像する。プリセットメモリ部18から撮像開始地点及び撮像終了地点を撮像するときのパン角度及びチルト角度を取得し、撮像を開始し、パン角度を検知する。ここで、マイクロコンピュータ17bは、撮像開始地点と撮像終了地点とを結ぶ直線上に位置する被写体を撮像する場合のカメラ装置100のチルト角度を、検知されたパン角度に基づいて演算する。そして、パン角度と演算されたチルト角度でカメラ装置100の撮像方向を変化させながら撮像終了地点に達するまで被写体を撮像する。
(もっと読む)
カメラ制御装置、カメラ制御方法、及び記憶媒体
【課題】 検知した動き領域が撮影禁止状態に関係する場合でも適切なカメラ制御を行うことができる。
【解決手段】 S405で動きありと判別された場合にはY分岐し、S406に進んで制御目標位置が撮影禁止領域かどうかを判別する。もし撮影禁止領域外(撮影許可領域内)であればY分岐し、S407に進んで追尾処理としてのカメラ制御を行う。もし撮影禁止領域外(撮影許可領域内)でなければN分岐して追尾処理としてのカメラ制御を中止し、S404に戻って動き検知処理を継続する。
(もっと読む)
撮像システム
【課題】 複数の撮影方向の撮影画像を同一画面で観察できるようにする。
【解決手段】 撮像装置により撮影された第1の画像を保存する記憶手段(16)と、撮像装置により撮影中の第2の画像を表示手段(3)に表示させる信号を出力する制御手段とを有する。制御手段は、第2の画像と記憶手段から読み出した第1の画像とを含むマルチ画像を表示させる信号を出力する。
(もっと読む)
動画シーケンス合成用ディジタルビデオシステム
取得した画像シーケンス群から表現作品を合成する画像処理システム(10)であって、画像シーケンス群撮影用のカメラ(12)と、撮影済画像シーケンス群一時記憶用の電子式ランダムアクセスメモリ(16)と、事前にプログラムされている命令群を第1記録媒体から受け取るための入力読取手段と、画像シーケンス(64)閲覧用のディスプレイ(18)及びオペレータ指示受取用のオペレータインタフェースを有し上記命令群に従いオペレータ向けディスプレイ表示を行いそれに対するオペレータ指示をオペレータインタフェースを介し受け取る制御パネルと、上記オペレータ指示に従い電子式ランダムアクセスメモリ(16)内撮影済画像シーケンス群をアレンジして表現作品に仕立てる上記命令群実行用の制御ロジックプロセッサ(20)と、表現作品を記録媒体に記録するための出力書込手段と、を備える。  (もっと読む)
(もっと読む)
監視カメラおよびそれを用いた監視システム
【課題】 街頭、街路、地下街、店内などにおける監視が人知れずになし得る監視カメラ、およびそれを用いた監視システムを提供する。
【解決手段】 街頭または店内に存在する物品に撮像部11を内蔵させてその物品に擬態させてなる監視カメラ10である。その物品は、情報表示装置、ディスプレイ、散髪屋のディスプレイ200、自動販売機210、標識・案内板220、ドア230、鏡240、蛍光灯250、街灯260、信号機270、カウンター280、アーチ290などとされる。本発明の監視システムSは、監視カメラ10と、監視カメラ10の映像を記録する映像記録装置20と、監視カメラ10の映像を表示する映像表示装置30と、監視カメラ10の映像を処理するとともに、監視カメラ10、映像記録装置20および映像表示装置30を制御する映像処理制御装置50とを備えてなるものである。
(もっと読む)
カメラ付き無線端末の位置決め用付属品
カメラ付き無線通信装置(40)のスタンド(10)は、ベース(12)と、ベース(12)に移動自在に取り付けられた調整可能な端末支持部材(14)と、ベース(12)に取り付けられた補助システムコネクタ(16)とを具備する。調整可能な端末支持部材(14)は、カメラ付き無線通信装置(40)のシステムインタフェース(48)に接続するシステムプラグ(20)を含む。補助システムコネクタ(16)は、カメラ付き無線通信装置(40)と関連する周辺装置(50)をベース(12)に接続する。システムプラグ(20)と、補助システムコネクタ(16)とは、ベース(12)内に張り渡されたシステムバス(18)によって相互に接続される。  (もっと読む)
(もっと読む)
カメラ用ペデスタル
高所からの撮影を狭い場所でも安全に操作可能とする。水平移動自在なキャリア22上で水平旋回自在なポール支持部15に伸縮ポール30を立設する。上段ポール3上部にカメラ固定部9を揺動可能に支持し、下段ポール1にチルト操作用滑車11を回転可能に設け、下段ポール基部に中段と上段のポール2、3及びカメラ18の荷重を相殺する定荷重ばね5を設ける。中段ポール昇降用ワイヤロープ7を下段ポール上部の昇降用滑車6に掛け回し、一端を定荷重ばね5、他端を中段ポール2下部に連結。上段ポール昇降用ワイヤロープ8を中段ポール上部の昇降用滑車10に掛け回し、一端を下段ポール1基部、他端を上段ポール3下部に連結する。チルト用ワイヤロープ14を下段ポール上部のチルト用滑車12と中段ポール下部のチルト用滑車13に掛け回し、一端をチルト操作用滑車11、他端をカメラ固定部9の支軸31の前後に連結する。 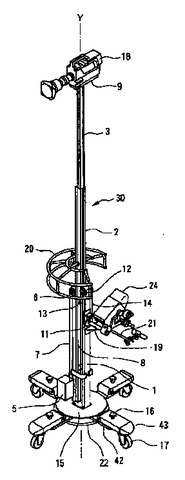 (もっと読む)
(もっと読む)
スピードドーム用スリップリングレーザー照明器
【課題】スピードドームカメラシステムを、周囲の照明が監視の必要について不十分な状態で、重量の増大を最小にし且つ現存のモータ設計で使用できるようにする照明システムを提供する。
【解決手段】レーザー照明システムを分割し、システム内に分散し、大きくて重い構成要素、特に出力源、ヒートシンク、及びレーザービーム発生器をスピードドームの外側に取り付け、軽量の光ファイバケーブル出力だけをスピードドームカメラと隣接して取り付ける。本発明の重要な革新は、レーザー用の出力を提供するのでなく、レーザービームを光スリップ継手に送出するだけであり、これによりカメラを高速で配向できるようにすることである。スピードドーム内のフラッシュバックをなくすため、パルスシステムを使用する。
(もっと読む)
ビーム、ハンドル及び前端アセンブリを備えた操作者援助遠隔操作カメラ位置決め及び制御システム
一人の操作者が手の届かない位置にあるカメラを使用及び支持することを許容する遠隔操作カメラ位置決め及び制御システムが開示される。この遠隔操作カメラ位置決め及び制御システムの様々な特徴が開示される。位置決め装置は一個以上のビームモジュールを含み、ビームモジュールは、例えば補強縦通材、固定筋交及び比較的低密度な安定化ウェブを使用することにより、(複数の)ビームモジュールの全長に沿って変化する断面曲げ剛性を有する。カメラは前端アセンブリによりビームモジュールに取り付けられ得、前端アセンブリは可能な限り大きな動作範囲に亘り、カメラ及び前端アセンブリの質量中心をビームモジュールの中立軸に沿って配置するように構成される。システムはまたハンドルモジュールと、ジョイスティック等のカメラ制御装置を包囲する制御装置籠を含む。ハンドルモジュールは例えば軸方向及び回転方向に移動可能なグリップと末端ハンドルグリップリングとを組み入れる。監視装置、ビデオレコーダ、バッテリパック等の補助サブシステムは任意で、ベスト等の支持衣服を使用して操作者により着用され得る。 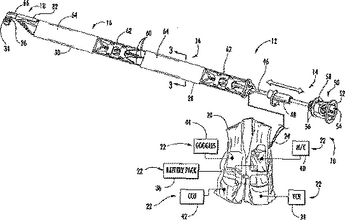 (もっと読む)
(もっと読む)
841 - 855 / 855
[ Back to top ]