
Fターム[5D088NN12]の内容
トラック変更、選択のためのヘッド移動 (342) | ヘッド移動速度制御 (152) | 発明、考案の目的、特徴 (62) | 制御方法、定数を変えるもの (21)
Fターム[5D088NN12]の下位に属するFターム
Fターム[5D088NN12]に分類される特許
1 - 17 / 17
磁気ディスク装置およびヘッドの制御方法
【課題】 ヘッドのアンロード動作の静粛性を向上することが可能な磁気ディスク装置およびヘッドの制御方法を提供する。
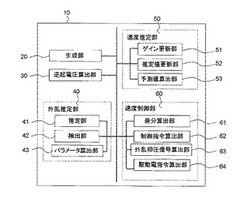
【解決手段】 実施形態の磁気ディスク装置は、情報記憶媒体に対して情報の書き込みと読み出しを行うヘッドと、両端に端子を有するコイルを有し、前記ヘッドを移動させるコイルモータと、前記コイルモータを駆動する駆動回路と、前記コイルの端子間電圧を検出する電圧検出部と、前記端子間電圧を用いて前記コイルの逆起電圧を算出する第1算出部と、前記ヘッドの移動速度の基準値である目標速度を生成する生成部と、前記逆起電圧を用いてサンプル時間ごとに前記ヘッドの第1速度と当該第1速度の誤差を推定し、当該誤差を減少させる方向に1サンプル時間後の第2速度を推定する第1推定部と、前記第2速度を前記目標速度に近づける方向に制御指令を算出する制御部とを備える。
(もっと読む)
制御装置、記憶装置および制御方法

【課題】PWM駆動中のスイッチングの影響を抑えつつ消費電力を下げる。
【解決手段】ディスク16に対する情報の読み出しおよび書込みを行うヘッド15を移動するアクチュエータ(VCM13)をPWM信号により駆動可能なPWM駆動部と、ヘッド15の位置をシーク中の場合、および、ヘッド15の位置をシーク後であってディスク16に対する情報の読み出しまたは書き込みを行っていない場合に、PWM駆動部に駆動信号を送出する制御部とを含むサーボ制御部12を備える。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記磁気ヘッドの位置決め制御時と、シーク時と、の両時において、前記積分器の出力を前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
ハードディスクドライブ装置及びハードディスクドライブの温度制御方法
【課題】小型かつ簡易な構成で騒音及び消費電力の増加を伴うことなく筐体内部の温度上昇を抑制する。
【解決手段】ヘッド11と一体化されたヘッドアーム10を駆動するボイスコイルモータ9と、磁気ディスク13に対してデータの書込み又は読出しを行うヘッド11とが密閉状態で筐体内部に収容されたハードディスクドライブ装置1の発熱を制御する場合、筐体内部の温度を温度センサ12により検出し、検出した温度に基づいてハードディスクコントローラ2によりボイスコイルモータ9への駆動電流を制御し、ヘッドアーム10の駆動速度を可変することにより、筐体内部における温度上昇を抑制することができる。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記数式モデルを更新し、前記更新に際して、前記積分器の出力は前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新する第1の更新モードを有することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ヘッドの下にデータセクタが来たときに速やかにデータを書き込むことができる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を磁気的に記録再生する磁気ヘッドを移動させる駆動部と、前記磁気ヘッドの目標位置と検出位置との差に基づいて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの移動前の位置と、前記磁気ヘッドの目標位置と、記録再生を行うデータセクタの位置と、に基づき、目標速度曲線を可変とし、前記駆動部の制御数式モデルを用いて前記駆動部の速度が前記目標速度曲線に追従するように前記駆動部を制御する速度制御系と、を備えたことを特徴とする磁気ディスク装置が提供される。
(もっと読む)
VCMドライバと磁気ディスク制御装置
【課題】シーク動作の短縮化を図ったVCMドライバ及び磁気ディスク制御装置を提供する。
【解決手段】磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して電流制御信号を形成する。VCMドライバは、上記制御信電流信号に従って上記磁気ヘッドの位置制御を行う。上記VCMドライバは、電流電圧変換部と駆動回路部と帰還回路とを有する。上記電流電圧変換部は、上記電流制御信号に対応した駆動電圧を形成する。駆動回路部は、上記電流電圧変換部で形成された駆動電圧を受けて、PWM動作により上記ボイスコイルモータの駆動電流を形成する。上記帰還回路は、上記駆動回路部の出力オフセット分を上記駆動電圧に負帰還させる。
(もっと読む)
シーク制御装置、シーク制御方法、記憶装置
【課題】シーク時の残留振動による性能低下を防ぐシーク制御装置、シーク制御方法、ディスク装置を提供する。
【解決手段】ヘッドのシーク制御を行うシーク制御装置であって、複数の所定のデータ長の範囲であるデータ長範囲毎に、シーク制御の制御情報を記憶する記憶部18に記憶された制御情報のうち、外部から指示されたデータ長に対応する制御情報を取得し、該制御情報に基づいてシーク制御を行うMCU11とを備えた。
(もっと読む)
磁気ディスク装置およびヘッド位置決め制御方法
【課題】目標速度に対するモデル速度の追従性を向上させることができるともに、制御指令の加速から減速への切替えを滑らかにして機械共振の励起を抑制すること。
【解決手段】磁気ディスク装置において、ヘッド位置決め制御系に、ヘッドの目標位置と前記ヘッドの実際の位置の誤差に基づいてフィードバック制御を行う位置誤差フィードバック制御系260と、予め定められた制御数式モデルによって、制御指令uと位置誤差フィードバック制御系260に対して目標位置の指令として出力するモデル位置とヘッドの目標速度に追従させるためのモデル速度とを求める制御系であってヘッドの目標位置を入力して、モデル位置から目標位置までの残り距離に対応する目標速度の微分値に基づいて制御指令uとモデル位置を求めるモデル制御系250と、を備えた。
(もっと読む)
シーク制御方法、シーク制御装置およびディスク装置
【課題】プラントをシーク制御するシーク制御装置において、シーク電流生成のためのモデルとプラントのモデルとの誤差による位置ずれを防止する。
【解決手段】シーク軌道生成(28)からシーク軌道を与えて、プラント(40)をシーク制御する際に、シーク時間に応じて、フィードバックループ(20,22,24)の周波数特性を、変更し、実際のプラント(40)とプラント(40)のモデルのずれに起因する位置ずれ成分のゲインを高くして、フィードバックループ(20,22,24)で、位置ずれを抑圧するよう制御する。シーク時間のばらつきを低減でき、且つオーバーラン、アンダーランを防止できる。
(もっと読む)
磁気ディスク装置
【課題】制御の応答性の遅延を招くことなく、シーク時の音を低減する磁気ディスク装置を提供する。
【解決手段】磁気ディスク装置1の制御回路11は、磁気ヘッド14を磁気ディスク13上に形成された目標トラックへ移動させるシーク動作の際に、ボイスコイルモータ15の駆動電力を制御して、磁気ヘッド14の移動速度を所定の目標速度に近づける。そして、制御回路11は、磁気ヘッド14を所定の目標速度に向けて加速させる加速区間において、前記所定の目標速度と実際の移動速度との差に応じて仮の電流値を定め、当該仮の電流値が、加速開始からの経過時間に関係して規定される制限値を超える場合に、当該制限値をボイスコイルモータ15の駆動電力の電流値として、ボイスコイルモータ15を制御する。
(もっと読む)
磁気ディスク装置
【課題】 ライトアクセスやリードアクセスに伴うCPUの占有を抑制することのできる磁気ディスク装置を提供する。
【解決手段】 磁気ディスク装置は、CPU110とは別に、ドライバIC用シーケンサ115を有する。ドライバIC用シーケンサは、CPU110からのトリガ、VCM用シーケンサ113からのトリガ、又はサーボマーク検出信号を受けて、RAM115aに記憶されたコマンド列を実行し、ドライバIC124に対してリードアクセス及びライトアクセスを行うことにより、加速度の測定、温度の測定、ボイスコイルモータに生じる逆起電圧の測定等を行う。
(もっと読む)
ハードディスクドライブのトラック探索制御方法,それを記録する記録媒体,ハードディスク及びコンピュータ
【課題】 ハードディスクドライブのトラック探索制御方法を提供すること。
【解決手段】 ディスクスイッチングを含むハードディスクドライブの探索制御方法において,目標トラックのあるディスクにヘッドをスイッチングする過程と,直前の目標トラックアドレスと目標トラックアドレスとを比較してトラック探索距離を算出する過程と,トラック探索距離がディスクのシフトを考慮した限界探索距離より短いか否かを判断する過程と,トラック探索距離が限界探索距離より短ければ,ヘッドが置かれたトラックのトラックアドレスを読み取り,読み取ったトラックアドレスと目標トラックアドレスとを参照してトラック探索距離及びそのためのシーク・プロファイルを決定する過程と,決定されたシーク・プロファイルによってトラック探索を行う過程と,を備える。
(もっと読む)
情報記録再生装置および方法
第1の転送モードと第1の転送モードより低速な第2の転送モードとを有するインタフェースを介してホスト装置と通信しながら、ディスク媒体への情報の書き込みとディスク媒体からの情報の読み取りを行う情報記録再生装置において、第2の転送モードが指定されたとき、第1の転送モードより高速な回転数またはシークタイムを設定して、ディスク媒体への書き込み動作を制御する。  (もっと読む)
(もっと読む)
ヘッド制御装置及びこれを用いたディスク装置
【課題】ヘッドの位置制御において、浮上条件の差異に基づくヘッド浮上量の変動を抑制することによって、信頼性を高めたヘッド制御装置とそれを用いたディスク装置を提供する。
【解決手段】情報の記録又は再生を行うヘッドと、前記ヘッドをディスク上の目標位置へ移動させるアクチュエータと、前記目標位置の情報と検出又は推定されたヘッドの現在位置の情報とが入力され且つ前記ヘッドの目標移動速度を決定すると共に、その目標移動速度とヘッドの現在の移動速度との差である速度誤差に応じた制御信号を出力する速度制御手段と、を備え、前記速度制御手段は、目標位置と検出又は推定されたヘッドの現在位置との差である位置誤差、ヘッドの移動方向及びヘッドのディスク上の半径方向位置に基づいて前記目標移動速度を決定する。
(もっと読む)
ハードディスクドライブ制御方法,ハードディスクドライブ制御装置,記録/再生装置および記録媒体
【課題】 ディスクドライブのような記録/再生装置における,温度変化に対するトルク変化を補正することの可能なハードディスクドライブ制御方法を提供する。
【解決手段】 本発明にかかるハードディスクドライブ制御方法は,測定されたハードディスクドライブ10の温度に相応して,シーク制御ループの利得がトルク定数温度補正値に基づいて変化するように制御され,シーク制御ループにより,ハードディスクドライブ10のシークモードでボイスコイル26に印加されるシーク駆動電流を発生させることを特徴とする。これにより,ディスクドライブのような記録/再生装置における,温度変化に対するトルク変化を補正することが可能となる。
(もっと読む)
ステッピングモータの制御方法
【課題】 ステッピングモータによる対象物の移動を制御できるようにする。
【解決手段】 対象物の初期位置を示す極値データP(0)から現在位置を表す極値データP(n)を減算して対象物の移動距離を示す過数データPPを算出し、目標とする移動距離を示す目標値データTPから過数データPPを減算して目標位置までの距離を示す残数データNPを算出する。残数データNPが基準値データKM0より大きいとき、段階的に増加する加速値データA(m)を速度値データV(n)に加算して速度値データV(n)を更新し、基準値データKM0より小さくなったとき、段階的に減少する加速値データA(m)を速度値データV(n)から減算して速度値データV(n)を更新する。更新した速度値データV(n)を極値データP(n)に加算して極値データP(n)を更新し、その中間ビットを駆動データとする。
(もっと読む)
1 - 17 / 17
[ Back to top ]