
Fターム[5F031DA08]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 容器の種類 (5,166) | 複数のウエハ等を収納するボックス状の容器 (1,167)
Fターム[5F031DA08]の下位に属するFターム
キャリアごと収納するケース (83)
Fターム[5F031DA08]に分類される特許
1,081 - 1,084 / 1,084
フォトクロミック性基板収納容器
フォトクロミック性不要電磁放射線露光表示装置を含む半導体ウェハ、基板又はレチクルの保管及び輸送用収納容器(10,24)。フォトクロミック材料は収納容器の少なくとも一部を製造するために使用されるプラスチックに組み入れられる。フォトクロミック材料は選択された波長範囲の光の露光に呼応して色又は暗さを変化させる。 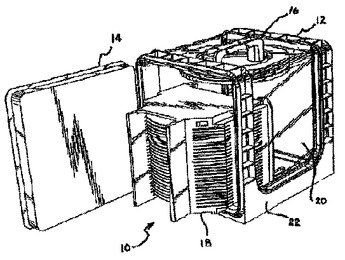 (もっと読む)
(もっと読む)
閉じたウェハカセットの内部に配置されたウェハのマッピングのための方法および装置

【課題】カセット内のウェハの情報を収集するための画像センサを備える撮像システムを提供すること。
【解決手段】カセット内のウェハが、カセットを開放する必要なくマッピングされる。カセットは、特定のタイプの放射に対して少なくとも部分的に透過性である。放射源が、カセットの透過性または透明な部分を通ってカセット内に方向付けられ、前記放射に対して感受性の高い画像センサが、カセットの内部のウェハから反射された放射を検知する。第2の放射源および第2のカメラが、好ましくは、異なる角度から追加のウェハの画像のために提供される。これらの画像を処理することによって、ウェハの特定の方向おおよびカセットの装填状態を判定することができる。
(もっと読む)
半導体製造システム

【課題】大気ロボットハンドリング装置を提供すること。
【解決手段】半導体製造ツール30は2つのロードロック36,40を有し、一方はツール30に入って処理される半導体ウェーハ用であり、他方は処理後にツール30から出るウェーハ用である。ツール30は3つの大気ウェーハハンドリングロボット44,46,48と関連して、ロードロック36,40により可能となる高スループットを得る。第1のロボット44は未処理のウェーハを供給源からウェーハ・プリアライナ50に搬送し、第2のロボット46は、ウェーハを、ウェーハ・プリアライナ50から、ウェーハがツール30に入るロードロック36に搬送し、第3のロボット48は、処理済のウェーハを、ウェーハがツール30から出るロードロック40から供給源42に搬送する。
(もっと読む)
処理システム
【課題】 占有スペースをそれ程大きくすることなく、簡単なプロセスを含めた多種多様な処理を行う。
【解決手段】 被処理体Wに対して所定の処理を行う複数の処理装置32A〜32Fと、前記複数の処理装置に共通に接続された共通搬送室34と、前記共通搬送室内に設けられて前記処理装置との間で前記被処理体を搬送するための第1及び第2の2つの搬送手段40、42と、前記共通搬送室内であって前記2つの搬送手段のそれぞれの搬送範囲が重なる範囲内に設置されて、両側がゲートバルブ58A、58Bによって開閉されて密閉空間となるバッファ部50、52と、前記共通搬送室に接続されて真空引き可能になされたロードロック室36A、36Bと、前記ロードロック室に接続された導入側搬送室38と、前記導入側搬送室内に設けられて、前記被処理体を複数収容するカセットと前記ロードロック室との間で前記被処理体を搬送する導入側搬送手段124とを備えた。
(もっと読む)
1,081 - 1,084 / 1,084
[ Back to top ]