
Fターム[5F031LA12]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | ボールネジ、送りネジ (397)
Fターム[5F031LA12]に分類される特許
381 - 397 / 397
搬送装置、露光装置、及び搬送方法

【課題】物体の位置ずれや落下等の不具合の発生を抑制しつつ処理速度を向上する搬送装置を提供する。
【解決手段】搬送アームによる物体の保持の有無を例えば吸着圧により検出し、保持無しと検出された場合における前記搬送アームが速度零から所定の移動速度Maxに到達するまでに要する時間t1が、保持有りと検出された場合における前記搬送アームが速度零から当該所定の移動速度Maxに到達するまでに要する時間t2よりも短くなるように、該搬送アームの移動を制御する。
(もっと読む)
真空処理装置

【課題】処理対象物の搬送及び搬出入の時間を短くし、処理能力を高めることのできる真空処理装置を提供する。
【解決手段】真空容器50に、第1のロードロック機構1と第2のロードロック機構2とが設置され、真空容器50の外に、処理対象物52を一時的に保持するバッファ6が配置されている。真空容器50の外に配置された第1の外部アーム17が、バッファ6に保持された処理対象物52を、第1及び第2のロードロック機構1、2に搬入することができる。第2の外部アーム18が、処理対象物52を、第1及び第2のロードロック機構1,2から受け取る。真空容器50の外にロボットアーム3,4が配置されている。ロボットアーム3、4は、真空容器外の保管場所51からバッファ6へ処理対象物52を搬送し、かつ第2の外部アーム18に保持された処理対象物52を受け取り、真空容器外の保管場所51へ搬送する。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
ワーク収納装置およびワーク収納方法
【課題】 構造簡単で安価であり、省スペース設計が容易なワーク収納装置。
【解決手段】 クランパー20で平板状ワーク1の側端部を把持して長さ方向前方に搬送してマガジン3に挿入するワーク収納装置で、クランパー20にワーク1をマガジン3の奥へと押し込む押込部材21を設ける。ワーク1を上下から把持する一対の第1クランパー20aと第2クランパー20bの少なくとも一方に押込部材21をワーク搬送方向前方に突出させて一体に形成し、クランパー20でワーク1をマガジン3に挿入した後、クランパー20を閉じて押込部材21の先端でマガジン3から突出するワーク後端部を押してマガジン3内に挿入する。
(もっと読む)
熱処理装置
【課題】基板と位置規制部との接触を防止することにより、フラッシュランプによる熱処理時における基板の破損を防止する。
【解決手段】熱処理装置は、基板9を保持する保持部7、保持部7を昇降する保持部昇降機構、基板9にフラッシュランプからの光を照射して加熱する光照射部、および、保持部7の上方にて基板9を支持する3本の支持ピン70を有する基板支持部700を備える。保持部7のサセプタ72は、基板9が載置される載置面722、および、載置面722の周囲に設けられた傾斜した側面723を備える。熱処理装置では、基板支持部700から保持部7への基板9の移載時に、極めて低速(秒速1mm以下)にて基板9を上昇させることにより、載置面722上における基板9の横滑りを防止して基板9と側面723との接触を防止し、熱処理時における基板9の破損を防止することができる。
(もっと読む)
ウェーハ検出装置及び方法
【課題】カセットからのウェーハの飛び出しを、簡略な構造にて、高精度に検出できるウェーハ検出装置を提供する。
【解決手段】開口部11を画定する壁部10に、ウェーハWを収納するカセットCを密着させ、開口部11を通してウェーハWの出し入れを行う際に、カセットC内の収納位置から飛び出したウェーハの有無を検出するために、壁部10に形成された開口部11の側部において、ウェーハの主面と平行な方向においてウェーハの外周部に検出用の光を照射するための透過型又は反射型の光センサ101、111と、光センサをウェーハの配列方向に走査させる駆動機構としてのシャフト103、113、連結バー、リードスクリュー及びモータを設けた。これにより、装置を小型化しつつ、高精度に検出することができる。
(もっと読む)
半導体製造装置
【課題】
プロセステーブル等、気密容器に収納される基板載置台に傾斜が発生しない様にした昇降機構を具備する半導体製造装置を提供する。
【解決手段】
基板処理室30と、該基板処理室内に設けられ基板25を保持する基板載置台31と、該基板載置台に連結され昇降可能な昇降ベース64と、該昇降ベースを昇降させる昇降駆動部66,67,68と、該昇降駆動部と前記昇降ベースを連結する連結部材69とを具備し、該連結部材は前記昇降ベースに少なくとも傾斜方向の自由度を有する様に連結された。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
搬送装置及びその制御方法並びに真空処理装置
【課題】回転用モータの回転駆動力を搬送用アームに正しく伝達させるとともに回転駆動軸の回転角度を正確に検出することにより、搬送部における搬送対象物を正しい位置に搬送可能な搬送装置を提供する。
【解決手段】本発明の搬送装置1は、気密構造を有するハウジング61内に、所定の同心回転軸を中心として互いに独立して回動可能に構成された第1〜第3駆動軸1a〜1cと、第1〜第3駆動軸1a〜1cの所定の部位にそれぞれ取り付けられた永久磁石32a〜32cと、永久磁石32a〜32cと対応して設けられた電磁コイル34a〜34cとが配設されている。電磁コイル34a〜34cに対し所定の情報に基づいて駆動電流を供給して第1〜第3駆動軸1a〜1cを駆動し、第1〜第3駆動軸1a〜1cに固定された第1及び第2リンケージ12a、12bによって搬送対象物を搬送する。
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
基板ステージ装置
【課題】X方向又はY方向の移動に際する基板の位置ずれを抑制することができ、かつ小型化を可能とする基板ステージ装置を提供する。
【解決手段】昇降駆動されるプッシャ部材2a,2bが基板ステージ125の少なくとも5箇所に設けられ、基板126の四隅部及び中央部を支持してロボットとの間で基板126の授受を行う基板ステージ装置において、基板126の中央部を支持するプッシャ部材2bが、基板126を支持するプッシャ部22と、先端部にプッシャ部22を有し、可撓性を有して押力及び引力を伝達する伝達具20と、伝達具20に押引力を付与する押引力付与装置17とを有し、プッシャ部22を、伝達具20に押力を与えて上昇させ、伝達具20に引力を与えて下降させる。
(もっと読む)
基板搬送装置および基板処理装置
【課題】複数段の基板搬送ラインのそれぞれの搬送基準位置に対して搬送対象となる基板を容易に位置合わせすることができる基板搬送装置および基板処理装置を提供する。
【解決手段】昇降コンベア30は、上段搬送ラインUTと下段搬送ラインLTとの間で昇降動作を行う。両搬送ライン間の搬送基準位置のずれに対処するために、上段搬送ラインUTおよび下段搬送ラインLTにそれぞれ上部位置決め部40および下部位置決め部50を設け、昇降コンベア30が上段搬送ラインUTまたは下段搬送ラインLTに位置したときに、上段搬送ラインUTおよび下段搬送ラインLTのそれぞれの搬送基準位置に予め正確に微調整された球面凸状部材46,56と昇降コンベア30に固設された第1円錐ブロック71および第1Vブロック72とを係合させることによって昇降コンベア30を各搬送ラインの搬送基準位置に位置合わせするようにしている。
(もっと読む)
基板バッファ装置、及び基板の収容方法
【課題】基板を一時的に保管できるようにして、処理装置、或いはキャリアカセットの稼働効率を向上させることのできる基板バッファ装置を提供する。
【解決手段】 キャリアカセットKに接続して設置される基板受渡し装置R1 の奥側に、基板Gの搬入出方向Pに沿って3台のバッファカセット装置Bを連結し、前記各バッファカセット装置Bに取付けられた直方体枠状のカセットフレームF2 に、前記搬入出方向Pと直交する水平方向及び垂直方向の双方に沿って多数本のワイヤを張力付与状態で連結したバッファカセットCを配設すると共に、前記各ワイヤと干渉しない位置に基板Gを移送させるための基板搬入出ユニットDを昇降可能に配設し、基板受渡し装置R1 によってキャリアカセットKから引き出された基板Gを、前記基板搬入出ユニットDによって各ワイヤの直上に形成された収容棚Sに収容させる。
(もっと読む)
デバイスハンドリングシステム及び方法
【課題】複数カテゴリのいずれか一つに割り当てられるようにしたデバイスをハンドリングする装置および方法を開示する。
【解決手段】上記装置は、垂直経路に沿ってトレイ群を移動させるようにした昇降機、当該トレイ群のトレイを選択的に固定し、当該固定されたトレイの上方に配置された追加トレイと当該固定トレイを支持するようにしたロッキング機構、および、一定の垂直位置に配置され、単数または複数のトレイを支持するための支持機構を有し、垂直経路の内外を水平移動するようにしたトレイロードアームを有する。
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 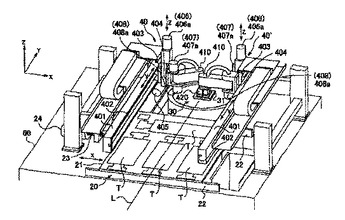 (もっと読む)
(もっと読む)
出力電流制御装置、ステージ装置、露光装置、およびこの露光装置により製造したデバイスおよびデバイスの製造方法
【課題】 リニア増幅器とPWM増幅器を効率よく組み合わせた出力電流制御装置、この出力電流制御装置を使用したステージ装置および露光装置を提供すること。
【解決手段】 出力電流に応じてリニア増幅器105とPWM増幅器104とを使い分け、出力電流検出器R5、107と比較器106とを共通に使用する。
(もっと読む)
搬送システムの搬送位置合わせ方法
【課題】 ティーチング基準位置における位置合わせを、精度良く且つ効率的に行なうことができる搬送システムの搬送位置合わせ方法を提供する。
【解決手段】 被搬送体Wを保持するフォーク48を有する搬送アーム部20と、この搬送アーム部を移動させる移動機構30と、搬送アーム部の移動エリア内に配置された少なくとも1つ以上の容器載置台24と、被搬送体の偏心量と偏心方向と切り欠き目印64の回転位置を光学的センサ62により検出する方向位置決め装置36と、全体の動作を制御する制御部72とを備えて位置合わせを行なう搬送システムの搬送位置合わせ方法において、マニュアルにより被搬送体を正確に位置合わせして載置したり、被搬送体を受け取りに行き、これを方向位置決め装置に搬送してその偏心量或いは切り欠き目印の回転誤差を求めることにより真に正しい適正位置座標を得ることができる。
(もっと読む)
381 - 397 / 397
[ Back to top ]