
Fターム[5F031MA03]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 複数の処理部を集積した装置(モジュール) (1,217) | 水平方向に集積 (951)
Fターム[5F031MA03]の下位に属するFターム
放射状配置 (386)
Fターム[5F031MA03]に分類される特許
561 - 565 / 565
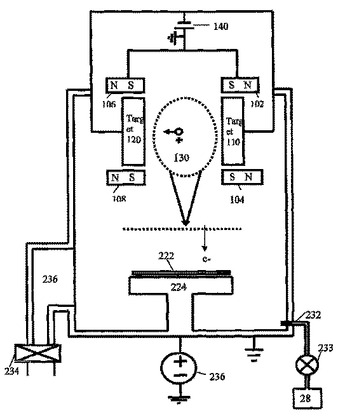
低温半導体製造装置
本発明の一形態において、本発明の半導体製造システムは、不活性ガスが吸気及び排気できる真空ハウジングと、システム内に配置された多数の蒸着チャンバとを含む。本発明の装置は基板222、支え電極224、基板電源236、ガス吸入口232、質量流量計233、ガス供給源28、真空ポンプシステム234、ポンピングポート236、磁石102、104、106、108、ターゲット110、120、電子制限区域130及び電源140を含む。
 (もっと読む)
(もっと読む)
CMPプロセスを用いたウエハ清浄装置
ウエハを主清浄ステーションへと搬送する複数の搬送ローラを備えた搬送装置と、ウエハを搬送する搬送ローラと清浄する清浄ローラとを備え、該清浄ローラ組に清浄用媒体を供給する供給源が設けられた主清浄ステーションと、ロボットがウエハを取り上げて乾燥ステーションへと搬送する取り出しステーションと、主清浄化ステーションと取り出しステーションとの間の水クッション搬送ラインと、主清浄ステーションと取り出しステーションとの間に位置する停止ステーションと、搬送装置の搬送ローラの速度および主清浄ステーションの搬送ローラ組の速度の速度比を予め設定し、停止ステーションにウエハが存在しなくなるまでは供給ステーションへの搬送を許さず、取り出しステーションにウエハが存在しない場合にのみ、ウエハを取り出しステーションへと解放する制御装置と、を備えることを特徴とするCMPプロセスを用いたウエハ清浄装置。  (もっと読む)
(もっと読む)
複数のロボットを用いた加工システムのスケジュール

【課題】複数のロボットを用いた加工システムのスケジュール用の技術を提供する。
【解決手段】ロボット20を用いた製造システム10であって、製造プロセスの一連のステージ14間で材料を搬送するために複数のロボット20を備えていてもよい。効率を向上させるため、これらロボット20の各々は、加工の流れとは逆に、操作の周期的なスケジュールに従って、独立して操作されてもよい。
(もっと読む)
基板処理装置

【課題】小型で、しかも安価でありながら、汎用性に優れた基板処理装置を提供する。
【解決手段】基板処理部PSでは、それぞれが互いに異なる現像処理を施す2つの現像処理ユニット10A、10Bと、現像処理された基板に超臨界乾燥処理を施す超臨界乾燥処理ユニット20と、これらの処理ユニット10A、10B、20に取り囲まれるように配置された主搬送ロボット30とが設けられている。この主搬送ロボット30は未処理基板Wを受け取ると、該基板Wに形成されているレジスト膜の膜材料に対応する現像処理ユニットに基板Wを搬送する。そして、現像処理が完了すると、いずれの現像処理ユニット10A、10Bで現像処理されたのかを問わず、主搬送ロボット30は現像処理を受けた基板Wを超臨界乾燥処理ユニット20にウェット搬送する。
(もっと読む)
処理システム
【課題】 占有スペースをそれ程大きくすることなく、簡単なプロセスを含めた多種多様な処理を行う。
【解決手段】 被処理体Wに対して所定の処理を行う複数の処理装置32A〜32Fと、前記複数の処理装置に共通に接続された共通搬送室34と、前記共通搬送室内に設けられて前記処理装置との間で前記被処理体を搬送するための第1及び第2の2つの搬送手段40、42と、前記共通搬送室内であって前記2つの搬送手段のそれぞれの搬送範囲が重なる範囲内に設置されて、両側がゲートバルブ58A、58Bによって開閉されて密閉空間となるバッファ部50、52と、前記共通搬送室に接続されて真空引き可能になされたロードロック室36A、36Bと、前記ロードロック室に接続された導入側搬送室38と、前記導入側搬送室内に設けられて、前記被処理体を複数収容するカセットと前記ロードロック室との間で前記被処理体を搬送する導入側搬送手段124とを備えた。
(もっと読む)
561 - 565 / 565
[ Back to top ]