
Fターム[5F031MA04]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 複数の処理部を集積した装置(モジュール) (1,217) | 水平方向に集積 (951) | 放射状配置 (386)
Fターム[5F031MA04]に分類される特許
1 - 20 / 386
ワーク検出機構
LED素子のソーティング装置
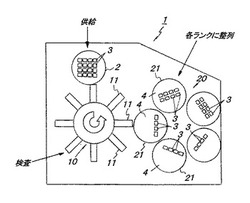
【課題】検査工程と整列工程を1台の設備で行うことによって工数削減と設備費のコストダウン及び設置スペースの縮小を図ることができるLED素子のソーティング装置を提供すること。
【解決手段】半導体ウエハ2を裁断して得られる複数のLED素子3の各特性をそれぞれ検査するとともに、各LED素子3の位置をそれぞれ検出し、各LED素子3をその特性データと位置データに基づいて各ランク毎に整列させてシート4上に貼付するLED素子3のソーティング装置1を、放射状に延びる複数のアーム11を備えた回転可能且つ上下動可能なインデックスユニット10を設け、該インデックスユニット10の前記各アーム11を回転及び上下動させてその先端に前記LED素子3を吸着しつつ、該LED素子3の位置検出と特性の検査、各ランク毎の整列及びシートへの貼付を順次行うよう構成する。
(もっと読む)
基体処理システム用の基体搬送装置

【課題】基体を処理するための処理システムの基体搬送装置において、搬送チャンバ内でのケーブル引き回し処理を不要とする。
【解決手段】基体搬送装置は、チャンバ壁12、テーブル14、リニアモータ搬送機構16、光学窓18、及び、レーザ計測器を備える。チャンバ壁は、搬送空間Sを画成する。テーブルは、搬送空間内に収容されている。当該テーブル上には基体を載置可能である。リニアモータ搬送機構は、搬送空間内においてリニアモータによりテーブルを移動させる。光学窓は、搬送空間と当該搬送空間の外部空間との間に設けられている。例えば、光学窓は、チャンバ壁に画成された開口を封止するように設けられる。レーザ計測器は、光学窓を介してテーブルに向けてレーザ光を照射し、テーブルからの反射光を受けて、テーブルの位置を計測する。
(もっと読む)
基板処理装置
【課題】搬送ロボット21,22を設置した搬送室11,12が並設され、搬送室の並設方向中間部を除く各搬送室の周囲複数箇所に処理室F1〜F4,R1〜R6が配置され、搬送室の並設方向中間部に設けられた基板の受渡し場所M1〜M3に、基板Sを各搬送ロボットとの間で受渡し自在に支持する基板支持部材3が配置された基板処理装置であって、スループットを向上できるようにしたものを提供する。
【解決手段】基板支持部材3は、基板Sを支持する少なくとも上下2段の支持部31,32を備える。また、上段支持部32に支持される基板Sの下面から剥離したパーティクルが下段支持部31に支持される基板Sに落下付着することを防止するため、上段支持部32と下段支持部31との間に遮蔽板33を設ける。
(もっと読む)
駆動装置及び基板処理システム
【課題】空間を分離する際のシール性及びメンテナンス性に優れた駆動装置を提供する。
【解決手段】同軸上に2つの回転軸(外側出力軸150及び内側出力軸250)を有する駆動装置80において、本体ケース300と外側出力軸150との間に真空シール170を配置し、更に、外側出力軸150と内側出力軸250との間に真空シール270を配置することで、駆動装置80の本体ケース300内の空間と、本体ケース300外の空間とを分離する。これにより、駆動装置80を減圧環境下で用いる場合であっても、駆動装置80の本体ケース300内の空間(大気圧環境側)と減圧環境側の空間とを分離することができるので、駆動装置80の減圧環境下での使用が可能となる。
(もっと読む)
基板処理装置
【課題】搬送途上において基板を反転することを容易に可能とする。
【解決手段】基板処理装置は、基板の上方を向く主面を処理する処理部と、基板が載置される載置部近傍の前部移載位置501と処理部近傍の後部移載位置502との間にて基板を搬送する基板搬送部5とを有する。基板搬送部5では、基板を保持する基板保持部51の両側部に一対の円筒部55が設けられ、搬送方向におよそ沿って伸びる一対の外側レール部53が基板保持部51の両側に設けられる。昇降機構571,572は、搬送方向における一対の外側レール部53の両端部に高低差を設けることにより、前部移載位置501から後部移載位置502へと一対の円筒部55を転がして、基板を反転しつつ基板保持部51を搬送する。これにより、搬送途上において基板を反転することが容易に可能となり、基板処理装置におけるスループットを向上することができる。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】 基板処理装置が備えるそれぞれの系への電力の供給を個別に制御することで、電力の消費量を低減する。
【解決手段】 処理室内に搬入された基板を処理する処理系と、処理室内に搬入された基板の処理位置を調整する処理室内搬送系と、少なくとも処理系及び処理室内搬送系に電力を供給する主電源と、処理系への電力供給路上に設けられた第1の開閉器と、処理室内搬送系への電力供給路上に設けられた第2の開閉器と、を備える。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】装置自体の有する能力を超えた処理条件が設定されるのを防止することができる基板処理装置及び半導体装置の製造方法を提供するを提供する。
【解決手段】基板処理装置は、ウエハを格納し、真空排気可能な少なくとも1つの真空容器と、この真空容器にガスを供給するガス供給部と、開度を調整することにより真空容器内からの排気量を制御するAPCバルブと、真空容器内の圧力を、ガス供給部によるガス供給量とAPCバルブの開度とに対応付けて記憶する記憶部と、操作者から所定の圧力、ガス供給量、及び開度に関する指示を受付ける受付部と、受付部が受付けたガス供給量の範囲及び開度の範囲のうち、受付部が受付けた所定の圧力に対応する記憶部が記憶するガス供給量の範囲及び開度の範囲に含まれる範囲を算出する算出部と、算出部が算出した範囲を表示する表示部と、を有する。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】表示部に接続された複数の制御部のうち、表示部に表示される表示対象を制御することができる基板処理装置、及び半導体装置の製造方法を提供する。
【解決手段】基板処理装置は、基板処理装置を操作する作業者が操作する操作部342と、操作部342に接続され、前記基板処理装置を制御する少なくとも2つ以上の制御部302,304,312と、制御部302,304,312が出力する信号を表示する少なくとも1つ以上の表示部342と、前記基板処理装置の起動時に、前記少なくとも2つ以上の制御部302,304,312のうち、少なくとも2つ以上の制御部302,304,312の起動時間を異ならせるように制御部302,304,312への電源の投入時機を制御する起動時間制御部344と、を有する。
(もっと読む)
弁体、ゲートバルブ、及び基板処理システム
【課題】弁体を洗浄する際に基板処理システムを実質的に停止させる必要を無くすことができる弁体を提供する。
【解決手段】基板処理システムは、基板Sにドライエッチング処理を施すプロセスチャンバ13と、基板Sを搬送するトランスファチャンバ11とを備え、プロセスチャンバ13及びトランスファチャンバ11を連通する連通口19aを開放又は遮断する弁体22は、移動可能な本体23と、本体23から取り外し可能に構成され、弁体22が連通口19aを遮断する際、連通口19aを介してプロセスチャンバ13と対向する対向部材40から構成されるカバー部材24とを備え、弁体22が連通口19aを遮断する際、連通口19aを介してプロセスチャンバ13側から弁体22を眺めたとき、連通口19a内において対向部材40の全てを視認することができる。
(もっと読む)
搬送ロボット
【課題】ロボットアームの伸縮過程で湾曲による鉛直方向に沿った高さ位置の変動を抑制し、かつ、軽量化も可能な搬送ロボットを提供する。
【解決手段】ロボットアーム11は、それぞれのアーム部21a、21bの長手方向Lに沿った全長のうち少なくとも一部は、長手方向Lに対して垂直な方向に広がる断面の形状が長方形を成す第一領域E1と、この長方形の一方の長辺W1から直角な方向に向けて突出した第二領域E2とからなる形状に形成されている。例えば、第一領域E1を成す長方形の一方の長辺W1の中央部分を中心にして、矩形の第二領域E2が突出しているような、断面が略T字型となるように形成されていれば良い。
(もっと読む)
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
基板貼り合わせ装置
【課題】複数の装置に対する基板保持部材の向きが各装置によって異なる。
【解決手段】基板貼り合わせ装置は、複数の基板を加圧して貼り合わせる第一の加圧部及び第二の加圧部と、基板を保持する基板保持部材を第一の加圧部に搬送する第一の搬送部と、第一の搬送部から基板保持部材を受け取り、第二の加圧部に搬送する第二の搬送部と、第一の搬送部から第二の搬送部への基板保持部材の受け渡しにより、第二の搬送部によって第二の加圧部に搬入される基板保持部材の向きが第一の搬送部によって第一の加圧部に搬入される基板保持部材の向きと異なる場合に、基板保持部材の向きを調整する調整部と、を備える。
(もっと読む)
基板貼り合わせ装置
【課題】係合部が基板保持部材に係合できない。
【解決手段】基板貼り合わせ装置は、複数の基板を加圧して貼り合わせる複数の加圧室と、前記基板を保持する基板保持部材と、前記基板及び前記基板保持部材を前記複数の加圧室に搬送する搬送部と、前記複数の加圧室にそれぞれ設けられ、前記基板保持部材の係合部に係合される係合部材であって、前記基板保持部材が異なる複数の向きのいずれの向きで前記加圧室に搬入された場合も前記係合部に係合する係合部材とを備える。
(もっと読む)
基板処理装置、基板処理装置制御プログラム、及び半導体装置の製造方法
【課題】待機中の基板収容器内の基板に対し、基板表面へのパーティクルの付着等の問題を抑制することができる基板処理装置を提供する。
【解決手段】基板を複数収容した基板収容器を複数載置する載置台と、前記載置台に載置された基板収容器の蓋を開閉する蓋開閉部と、蓋を開けられた基板収容器内の基板の有無又は位置を確認する基板確認を行う基板確認部と、基板収容器内の基板を処理室へ搬送する基板搬送機構と、前記基板搬送機構により搬送された前記処理室内の基板に対して処理を行う基板処理部とを備えた基板処理装置において、前記載置台に載置された第1の基板収容器内の基板を対象として基板処理中に、第2の基板収容器が前記載置台に載置された場合、前記第2の基板収容器の蓋を開けて、前記第2の基板収容器内の基板に対して前記基板確認部による基板確認を行った後に、前記第2の基板収容器の蓋を閉じる。
(もっと読む)
プラズマ処理装置及びプラズマ処理方法
【課題】プラズマ処理装置において、シングルアーム型の搬送装置を採用しつつ高スループットを実現する。
【解決手段】ドライエッチング装置1の搬送装置15は、処理前のトレイ3をストック部13のカセット62の主棚部67b,68bから回転ステージ33に搬送し、回転ステージ33でのアラインメント処理後のトレイ3をカセット62の仮置き棚部67c,68cを経てプラズマ処理部11へ搬送する。また、搬送装置15は、処理後のトレイ3をプラズマ処理部11からストック部13のカセット62の主棚部67b,68bに搬送する。
(もっと読む)
基板受け渡し装置、基板受け渡し方法及び基板処理装置
【課題】基板搬送機構の保持部材に基板を水平に保持し、昇降部材を介して載置台に基板を受け渡すにあたって、受け渡しに要する時間を短縮できる技術を提供すること。
【解決手段】保持部材23の保持部に水平に保持されたウエハWa(Wb)を昇降ピン37a(37b)を介して載置台3a(3b)に受け渡すにあたって、保持部材23上のウエハWa、Wbの位置を検出し、その検出結果に基づいて保持部材23を移動させると共に、昇降ピン37a(37b)の上昇のタイミングを求め、保持部材23を移動させながら昇降ピン37a(37b)を突き上げてウエハWa(Wb)を受け取るようにしている。そしてウエハWa(Wb)を昇降ピン37a(37b)に受け渡す動作が安定するように減速区間を設定し、それ以外の区間では、従来通り高速で保持部材23を移動させる。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
基板処理装置及び基板処理方法
【課題】大気開放の時間を短縮し、スループットを向上させた基板処理装置を提供する。
【解決手段】本発明の基板処理装置1は、チャンバ11と、前記チャンバ内に配され、基板2が載置されるステージ12と、ガス供給ライン13aを通じて、前記チャンバ内に所定のガスを導入するガス供給手段13と、前記チャンバ内の圧力P1 を検出する圧力センサ15と、前記ガスの導入圧力P2 を制御する制御手段16と、を備え、前記ガス供給手段が、前記チャンバ内に所定のガスを導入圧力P2 で導入して前記チャンバを真空状態から大気開放する際に、前記圧力センサは、チャンバ内の圧力P1 を検出し、前記制御手段は、前記P1 に対して、前記P2 と前記P1 との差が略一定となるように、前記P2 を制御すること、を特徴とする。
(もっと読む)
1 - 20 / 386
[ Back to top ]