
Fターム[5H004GB09]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 家電 (24)
Fターム[5H004GB09]に分類される特許
1 - 20 / 24
制御システム
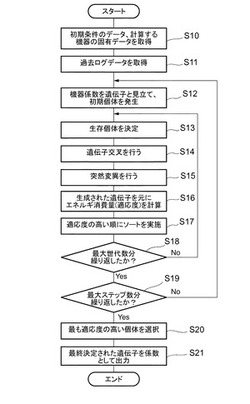
【課題】遺伝的アルゴリズムを利用して最適な制御値を求めることができる制御システムを提供することを課題とする。
【解決手段】制御対象システムを制御するための制御値を出力する制御システムであって、制御対象システムに対する最適な制御値を生成する最適制御装置を有し、最適制御装置は、遺伝的アルゴリズムを実施した回数が設定された実施回数になるまで、遺伝的アルゴリズムを実施する毎に初期個体を発生し、その発生した初期個体を用いて遺伝的アルゴリズムを実施して適応度の高い個体を探索し、遺伝的アルゴリズムを実施した回数が実施回数になった場合、その実施回数分の遺伝的アルゴリズムでそれぞれ探索された個体の中から最も適応度の高い個体を選択し、その選択した個体に基づいて制御対象システムに出力する制御値を生成することを特徴とする。
(もっと読む)
実空間アプリケーションサービスの制御システム及び制御方法

【課題】シナリオの導入及び解除に伴うコスト低減、適切な機器競合の検出及び解消方法、シナリオを複数ユーザで利用可能とする利用形態の多様性を実現することができる実空間アプリケーションサービスの制御システムを提供する。
【解決手段】実空間アプリケーションサービスは、これに対応するアプリケーションソフトウェアが実行されることにより実現され、その内容はアプリケーションソフトウェアの記述できる範囲において自由に変えることができるともに、アプリケーションソフトウェアは複数同時に存在し、動作することが可能であり、実空間アプリケーションサービス、実空間アプリケーションサービスを制御するシステムのユーザ、機器、実空間アプリケーションサービス及び実空間アプリケーションサービスが提供される場所のそれぞれに対応したソフトウェアエージェントを具備する。
(もっと読む)
ゆらぎ信号発生装置、ゆらぎ信号発生方法、及びゆらぎ信号発生プログラム
【課題】様々な傾きを有したゆらぎを発生させるとともに、人の要求する山場(ピーク)位置もある程度設定できるゆらぎ信号発生装置を提供する。
【解決手段】ゆらぎ信号発生装置10は、パワー密度を算出する関数とパワー密度を算出する関数のパラメータを入力する入力部11と、入力部によって入力されたパラメータとパワー密度を算出する関数に基づいて、各周波数のパワー密度を算出するパワー密度算出部12と、パワー密度算出部によって算出された各周波数のパワー密度を正弦波成分と余弦波成分に分けるパワー密度分割部13と、パワー密度分割部によって分割された成分に基づいて逆フーリエ変換により時系列データを生成する時系列データ生成部14と、時系列データに基づいて出力データを生成し出力するデータ出力部15と、を備えた。
(もっと読む)
センサネットワークシステム、データ処理装置、およびデータ処理方法
【課題】省エネを実現するための具体的な指標を算出する。
【解決手段】センサノード20として、当該センサで対象者の状態や動作を示す対象者データを検出して送信する対象者センサノード20Aと、当該センサで対象者の周囲の環境や物の状態を示す環境データを検出して送信する環境センサノード20Bとを備え、データ処理装置10において、制御処理部11により、これらセンサノード20から通信ネットワーク30を介して対象者データ、環境データ、および消費エネルギーデータを、センサデータとして収集し、最適値算出部12により、これらセンサデータに含まれる環境データのうち対象者の周囲の環境や物の状態を制御可能な可制御センサデータについて、これらセンサノードに基づき消費エネルギーデータを最小とする最適値を算出する。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
エネルギー使用制御システム及び方法
本発明は、エネルギー使用制御システムにおける調整ノードを提供する。調整ノードは、エネルギー消費ノードからトレードオフ関数を受け取る。調整ノード及びエネルギー消費ノードは集合的にドメインを形成する。エネルギー消費ノードからのトレードオフ関数は、エネルギー消費ノードによるエネルギー消費結果と前記結果に対する満足度との間の関係を記述する。調整ノードは、受け取ったトレードオフ関数に基づき、エネルギー消費ノードについてそれぞれの方針を創成する。方針のそれぞれは少なくとも1つの目標及び/又は少なくとも1つの手順を含み、エネルギー使用を制御するようにそれぞれのエネルギー消費ノードを導き、エネルギー消費ノードがドメインのために最適エネルギー節約を集合的に達成するようにする。  (もっと読む)
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
半導体装置および撮像装置
【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
ベルト駆動制御装置及び画像形成装置
【課題】無端状ベルトの回転むらを原因とする各色の位置ずれを防止することができるベルト駆動制御装置及び画像形成装置を提供する。
【解決手段】無端状ベルトの回転速度が目標速度となるように、規定の制御周期毎に、速度検出手段によって検出された無端状ベルトの速度に基づいて、ステッピングモータの単位時間当たりの駆動パルス数をフィードバック制御する回転制御手段を具備し、回転制御手段は、規定の制御周期毎にフィードバック制御するステッピングモータの単位時間当たりの駆動パルス数について、前回の単位時間当たりの駆動パルス数に対する今回の単位時間当たりの駆動パルス数の増減値である制御値を規定の範囲に制限する。
(もっと読む)
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
適応制御装置、画像形成装置、およびプログラム
【課題】 不安定零点を有しない離散時間系の伝達関数モデルで表される制御対象を同定するにあたり、同定により得られるモデルにも不安定零点が生じないようにする。
【解決手段】 用紙搬送を制御する制御部57では、適応制御手法が適用された2自由度系の制御系が構築されている。適応パラメータ演算部88は、制御対象の離散時間系伝達関数モデルP(z)を同定し、同定モデルP^(z)を得る。フィードフォワード制御部87は同定モデルP^(z)の逆モデル1/P^(z)を伝達関数としてフィードフォワード操作量を生成する。離散時間系伝達関数モデルP(z)は、分子がb(z+1)4で表されるものであるが、適応パラメータ演算部88は、このP(z)の各係数を同定(推定)するにあたり、分子を多項式展開して各次数毎に係数を推定せず、分子をそのままの形、即ち、零点(ここでは−1)を固定したまま、一つの未知の係数bを推定する。
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
ディスク装置、位置決め制御回路及びそれを用いた情報処理装置
【課題】外乱抑圧機能を持つ位置決め制御系を持つディスク装置において、早期に外乱を抑圧して、ヘッドの振動を防止する。
【解決手段】ディスク装置(20)の外乱抑圧機能を有する位置決め系(14)に、外部(50)から、既知の外乱周波数を初期値にセットするためのインターフェース回路(11−1)を設けた。直ちに、未知の外乱周波数を抑圧し、又は、既知の外乱周波数からスタートし、以降、周波数が変化しても、推定周波数は、それに追従でき、早期にヘッド(3)の振動を防止できる。
(もっと読む)
対象の数に合わせた最適制御システム、無線端末、制御機器
【課題】 室内の人数も加味して空調の制御を行う等、複数の対象の数に合わせた管理対象の最適な制御を行い得る最適制御システムを提供する。
【解決手段】 エリア1乃至nのそれぞれに配設した管理対象11乃至1nと、複数の検出対象のそれぞれに一対一に対応させて帰属させるとともにそれぞれが所定の端末信号を無線で送出する無線端末31乃至35と、エリア1乃至nのそれぞれに配設するとともに、端末信号を受信して受信した無線端末31乃至35の数を表す情報を少なくとも含む受信信号を送出する受信端末21乃至2nと、各受信信号を受信して処理し、各エリア1乃至n毎の無線端末31乃至35の数に基づく要素を少なくとも加味して各管理対象11乃至1nの所定の制御を行う管理サーバ51とを有する。
(もっと読む)
制御装置および制御プログラム
【課題】 追従性能が高められた制御装置および制御プログラムを提供する。
【解決手段】 エラー波形学習部303で、エラー波形の、回転体の回転に同期した基本波および各高調波からなる各成分を表わす各正弦波関数の係数を求め、これらの係数から、各正弦波関数の位相の時間変化を位相変化検出部305で検出し、発振検出部306で、検出された位相の時間変化が急激である場合は発振状態であると判断して、位相調整部307で位相を所定の値で更新して補正する。
(もっと読む)
制御装置および制御方法
【課題】可能な限り少ないアクチュエータ数で状態量制御を実現する。
【解決手段】制御演算分岐部5は、第1のアクチュエータが稼働し、第2のアクチュエータが停止している際に、操作量MVaが上限値に到達している状態が特定時間Tahを経過して継続した場合は、第2のPID演算部3aに第2のアクチュエータを制御させ、第1のアクチュエータが最大出力を維持するよう第1のPID演算部3bに指示し、第2のアクチュエータが稼働し、第1のアクチュエータが最大出力を維持している際に、操作量MVbが下限値に到達している状態が特定時間Tblを経過して継続した場合は、第2のアクチュエータを停止するよう第2のPID演算部3bに指示し、第1のPID演算部3aに第1のアクチュエータを制御させる。
(もっと読む)
無限インパルス応答フィルタ回路、及び磁気ディスク装置
【課題】係数を適応的に変化させても安定的に動作可能なIIRフィルタ回路を提供する。
【解決手段】係数を適応的に変化させる無限インパルス応答フィルタ回路であって、 その伝達関数が、zの次数がN以下である多項式B(z)と、次数がNである多項式A(z)とを用いて、
で規定され、
として、前記多項式A(z)のzのN乗の項を1としたとき、前記Nが偶数及び奇数に対応して、前記多項式A(z)をあらかじめ定めた条件を満足するよう定められてなることを特徴とする無限インパルス応答フィルタ回路。
(もっと読む)
PWM駆動方法とPWM駆動装置
【課題】PWM駆動方法において、入力誤差信号のゼロ付近の入力でも出力応答させ不感帯をなくす制御方法を提供する。
【解決手段】スイッチング素子121,122,221,222で構成されるブリッジ回路の出力端子の間にアクチュエータ9を接続し、信号G1UとG1L,G2UとG2Lでアクチュエータ9に通電してPWM制御するに際し、スイッチング素子121と122,221と222が同時にオフする区間(デッドタイム)を設けた駆動タイミング信号を生成するとともに、それらのデッドタイムが一対のハーフブリッジ回路の相互間で重ならないようにアクチュエータ9を駆動することで、小さい時間差の差動入力PWM信号(S51−S52)でも応答できる。
(もっと読む)
1 - 20 / 24
[ Back to top ]