
Fターム[5H004KC17]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306) | 最適レギュレータ (13)
Fターム[5H004KC17]に分類される特許
1 - 13 / 13
移動体の動作制御装置及びこれを用いたスロッシング制御装置
【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
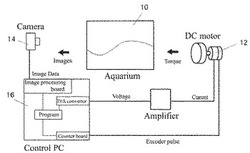
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
モデル予測制御においてフィードバック及びフィードフォワードを組み合わせるための方法及びシステム

【課題】非線形プラントにおけるモデルの不確実性の影響を最小化するために、フィードフォワード及びフィードバック制御を組み合わせる。
【解決手段】センサ信号プロセッサ140は、エンジン120上に配置された複数のセンサ110からの信号に基づいて、エンジンに関するパラメータ間の関係を決定して、エンジンと関連付けられているアクチュエータ130に対するフィードフォワード信号を算出し、モデルベース予測フィードバックコントローラ200に関する複数の制約条件をフィードフォワード信号の関数として処理するためのストラテジを提供する。アクチュエータ信号プロセッサ150は、アクチュエータに対する制御信号を、フィードバック信号及びフィードフォワード信号の総和として生成し、アクチュエータに送信する。制御信号に含まれるフィードバック信号が、外乱に関する不確実性の影響を最小化することができる。
(もっと読む)
モデル不一致を補償するためチューニング可能積分コンポーネントを備えるモデル予測コントローラ
MPCコントローラ技法はMPCタイプのコントローラで今日一般的に使われている方法より良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法より良好に機能するMPCコントローラをもたらす。具体的には、チューニング可能積分ブロックをMPCコントローラに加えることでMPCコントローラの性能が強化される。このチューニング可能積分ブロックは、予測誤差や他の制御誤差を示す積分コンポーネントを形成し、このコンポーネントをMPCコントローラアルゴリズムの出力へ加えることで、予測誤差のそもそもの究極的理由であるモデル不一致の存在下でより迅速又は良好な制御を提供する。この技法により、MPCコントローラはより速やかに反応し、且つMPCコントローラのロバスト性を低下させることなく、モデル不一致の存在下でより良好な設定点変更及び負荷変動性能を提供することが可能となる。  (もっと読む)
(もっと読む)
線状構造体位置制御システム、線状構造体の位置制御方法及び移動構造体制御システム
【課題】掘削船から延びるライザー管のリエントリ作業を短時間に効率よく行う。
【解決手段】掘削船から延びるライザー管のリエントリ作業を行う際、ライザー管の掘削船に対する傾斜角度と、ライザー管の下端の位置と、掘削船の現在の位置の情報とを計測し、計測した傾斜角度の情報と、下端の位置の情報と、掘削船の現在の位置の情報とに基づいて、指定された掘削船の指定位置に対するフィードバック制御信号を生成し、このフィードバック制御信号を、掘削船に搭載された位置制御装置に供給する。
(もっと読む)
制御システムのための制御パラメータを確定する方法
【課題】制御システムを同調する方法を改良することによって、用いるのに容易で且つ最小の実際のプラント動作しか必要としない方法及びシステムを提供する。
【解決手段】コントローラ(14)及びプラント(10)を有する制御システムのための制御パラメータを確定する方法は、プラントのモデル(70)及びコントローラのモデル(64)を確立するステップ、及び閉ループ・システムに関する性能指数を、選択された安定余裕を説明するコントローラ・パラメータの関数として計算するステップを含む。
(もっと読む)
リニアアクチュエータ
【課題】位置情報の差分値とサンプル時間に依存することなく速度情報を生成して制御帯域を上げることを可能とするリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値及び前記推力指令に基づいて、前記速度検出値を推定演算する状態推定器を備える。
(もっと読む)
システムの最適制御方法
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
位置決め制御方法、位置決め制御装置及び画像形成装置
【課題】負荷変動の影響を受け難い制御系とし、騒音を抑えた無理のない制御を可能とする。
【解決手段】駆動軸に連結された駆動側慣性体と、従動軸に連結された従動側慣性体とを含む捩り振動系を成す機構の位置決め制御装置において、予め初期位置から目標位置への状態軌道及び操作量軌道のデータ系列を制御の参照軌道としてそれぞれ記憶する状態軌道系列記憶部130及び操作量軌道系列記憶部120を備えた参照軌道発生部110と、前記状態軌道系列記憶部130に記憶された前記状態軌道に沿うように前記操作量軌道系列記憶部120に記憶された操作量軌道に対してフィードバック制御部140によって状態フィードバック制御を行い、位置決めする。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
ディジタルサーボ制御装置及びレーザ加工装置
【課題】 DA変換器を用いたディジタルサーボ制御装置において、電流制御回路内部の電流偏差信号に重畳するスパイク状の脈動を抑えて、低電圧で安価な電源回路を用いても従来と同等以上の制御性能を有するディジタルサーボ制御装置を提供する。
【解決手段】DA変換器5が出力するアナログ信号S5に作用する1次ローパスフィルタ4と、1次ローパスフィルタ4に起因する位相遅れを補償する安定化補償手段とを設け、1次ローパスフィルタ4の出力信号を電流指令信号S4として電流制御回路3に入力する。1次ローパスフィルタ4はサンプリング周期の逆数で決まるサンプリング周波数よりも低い折点周波数を有するローパスフィルタとする。1次ローパスフィルタ4に代えて、サンプリング周期の逆数で決まるサンプリング周波数に等しい遮断周波数、又はサンプリング周期の逆数の1/2で決まるナイキスト周波数の整数倍に等しい遮断周波数を有するノッチフィルタとすることができる。
(もっと読む)
自動制御装置
【課題】1サンプリング時間よりも大きいむだ時間要素が存在する制御系においても効率よく制御パラメータを演算可能とする。
【解決手段】rを記録再生素子31が本来あるべき位置を表す目標位置であり、dは目標位置に加わるディスクの周ぶれ等の外乱であり、eは位置誤差である。位置誤差eは制御演算部K(z)で制御演算される。このときの制御演算部K(z)における演算時間遅れを、1次遅れ要素(1−f)/(z−f)及び/又はむだ時間要素1/zとでモデル化し、この制御モデルに基づいて制御パラメータを算出することにより、制御対象の装置に対して設計時想定した能力を十分に発揮できる制御を可能とする。
(もっと読む)
力覚コントローラ装置及びその制御方法
【課題】 操作をパワーアシストするとともに、手触り感など微妙な感覚を操作者に効率的に伝達することができるようにする。
【解決手段】 本発明の力覚コントローラ装置1は、制御対象15に対する操作を入力するための操作端2を含む操作機構3と、該操作端2に加えられたトルクを検出する操作力検出部5と、操作端2の現在位置を検出する現在位置検出部6と、制御対象15に加わる外力を入力する外力入力部8と、操作端2を駆動する駆動部9と、前記操作力に応じて操作端2に対する操作をアシストするとともに、外力Dに応じて操作端2に力覚を提示するように、前記操作力及び前記外力を任意の比率で合成した力に基づいて操作端2の目標位置を算出し、該目標位置及び前記現在位置に基づいて操作端2を該目標位置に追従させるように駆動部9を制御する力覚制御部10とを備えている。
(もっと読む)
自動制御装置
【課題】 1サンプリング時間以上の大きいむだ時間要素の存在する制御系においても効率よく制御パラメータを演算することができ、所望の制御性能を得ることが可能な自動制御方法を提供する。
【解決手段】 生成した制御信号に基づいて制御対象の角度又は位置を目標値へ向けて閉ループで動作制御する自動制御方法において、制御対象の現時点における角度又は位置の目標値に対する差分に応じた差分信号を生成し、制御対象を動作制御するための制御パラメータを演算するとともに、演算した制御パラメータを用いた制御関数に基づいて、上記生成した差分信号につき所定の演算処理を施すことにより制御信号を生成する。このとき、閉ループにおける閉ループ伝達関数の極から、当該閉ループにおけるむだ時間要素を含む演算式に基づいて、上述の制御パラメータを演算する。
(もっと読む)
1 - 13 / 13
[ Back to top ]