
Fターム[5H004MA02]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | タイマ (9)
Fターム[5H004MA02]に分類される特許
1 - 9 / 9
PID制御器のモード切替装置
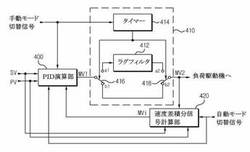
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置

【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
機械運転制御装置
【課題】積算運転時間を均一化し、更に、連続運転時間及び連続停止時間が長時間継続することのないように各機械の起動・停止制御を行うこと。
【解決手段】起動・停止順序指定手段10は、優先度係数演算部2A〜2Dからの優先度係数PA〜PDに基づき機械1A〜1Dの起動順序又は停止順序について仮指定を行う。起動・停止順序指定手段10は、この仮指定を行った後、連続時間規定値超過監視手段9からの規定値超過監視情報S1を参照し、連続運転時間又は連続停止時間について規定値を超えたものがあれば、その起動順序又は停止順序が早くなるように仮指定を修正して指定を行う。
(もっと読む)
調節計
【課題】 ヒータに電力を供給する電源の電圧が異なる環境下で使用しても同様に制御特性を得られるようにする。
【解決手段】 補正前の操作量と基準状態の基準操作量との比である補正係数を用いて、PIDコントローラからの操作量を補正し、これによって、実運用時の電源電圧が、基準状態の電源電圧とは異なっていても、その影響を解消するように操作量を補正し、基準状態と同様の制御特性になるようにしている。
(もっと読む)
ロボット制御装置
【課題】 急激な動作を防止することにより、安全性を向上させる。
【解決手段】 制御装置11は、比例ゲインを変更する際、CPU32により、比例ゲインを変更したことにより生じる出力の変化を相殺するように、誤差積分を算出し更新する。制御装置11は出力更新周期が経過すると、誤差、比例ゲインの最新値、積分時間の最新値および誤差積分の最新値を併用して、位置および速度のいずれかの出力値を算出する演算回路40と、出力値を出力する出力端子38とを含む。
(もっと読む)
信号を復号するためのシステムおよび方法
【課題】機械の回転部の信号を復号するためのシステム(54)を提供すること。
【解決手段】システム(54)は、回転部(58)から受信された信号に基づいてN個の信号を出力するように構成されるセンサ(60)と、N個の信号から取得されたサンプリングデータの間の複数個の差から値を導出するように構成されるプロセッサ(62)とを含む。
(もっと読む)
ボイラ自動制御装置および制御方法
【課題】
1台の通風機が運転中の状態から2台目の通風機を起動する際にインバータ駆動側の通風機の風量が不安定化する可能性が高くなるという問題がある。本発明は、この点を考慮して安定かつ安全に通風機を起動するための制御方法を確立することを目的とする。
【解決手段】
インバータにより駆動される通風機の運転中に商用周波数電源により駆動される通風機を起動する場合に、商用周波数電源により駆動される通風機の流量調節操作端への開度指令の増加に伴ってインバータにより駆動される通風機の流量調節操作端への開度指令を減少させる手段と、商用周波数電源により駆動される通風機の流量調節操作端への開度指令がそれぞれの通風機による運転時の開度に到達した後にインバータにより駆動される通風機の回転数をそれぞれの通風機による運転時の回転数に変更する手段とを具備することを特徴とする。
(もっと読む)
ボイラ負荷変化時先行制御方法及び装置
【課題】最終値が不明な負荷変化時にも適切なボイラ入力加速指令を出力して対応でき、燃料や給水等の制御の安定化を図り得るボイラ負荷変化時先行制御方法及び装置を提供する。
【解決手段】負荷上昇指令40又は負荷降下指令41が入力された時点から時間をカウントし、負荷上昇指令40又は負荷降下指令41の継続時間46に応じて予め設定されたボイラ入力加速指令25を出力するBIR回路26を備えることにより、ボイラの負荷変化時に対応するための先行制御系統23を構成する。
(もっと読む)
駆動装置
【課題】 アクチュエータを構成する駆動コイルを滑らかに動作させることが出来る駆動装置を提供することを目的としている。
【解決手段】 ステップST13で、動作速度定数の累積値ΣΔTを所定値Sで割っているため、ΣΔT/Sが自然数でない有理数や無理数を取ることも可能になる。その結果、本発明では、従来では得られなかった移動速度を得ることが可能になる。所定値Sや移動速度定数ΔTを違う値に設定すれば、また違った移動速度を得ることができ、従来に比べて細かく移動速度の設定を行なうことが可能になる。
(もっと読む)
1 - 9 / 9
[ Back to top ]